本文介紹了幾個常見的匹配演算法,通過演算法程序和演算法分析介紹了各個演算法的優缺點和使用場景,并為后續的搜索文章做個鋪墊;讀者可以通過比較幾種演算法的差異,進一步了解匹配演算法演程序序以及解決問題的場景;KMP演算法和Double-Array TireTree是其中演算法思想的集大成者,希望讀者重點關注,
1 前言
上文探究了資料結構和演算法的一些基礎和部分線性資料結構和部分簡單非線性資料結構,本文我們來一起探究圖論,以及一些字串模式匹配的高級資料結構和演算法,【搜索中常見資料結構與演算法探究(一)】(https://developer.jdcloud.com/article/2153)
搜索作為企業級系統的重要組成部分,越來越發揮著重要的作用,ES已經成為每個互聯網企業必備的工具集,而作為搜索的基礎部分,文本匹配的重要性不言而喻,文本匹配不僅為精確搜索提供了方法,而且為模糊匹配提供了演算法依據,比如相似度演算法,最大搜索長度演算法都是在匹配演算法的基礎上進行了變種和改良,
2 圖論基礎
2.1 圖的基本概念

以我們物流的抽象模型為例:每個配送中心是一個頂點,由兩個頂點表示的配送中心間如果存在一條干線運輸線,那么這兩個頂點就用一條邊連接,邊可以由一個權,表示時間、距離和運輸的成本,我們愿意迅速確定任何兩個配送中心的最佳線路,這里的“最佳”可以是指最少邊數的路徑,也即經過的配送中心最少;也可以是對一種或所有權總量度所算出的最佳者,
2.2 圖的表示方法
我們考慮實用情況,以有向圖為例:
我們假設可以以省會城市開始對頂點編號,如下圖
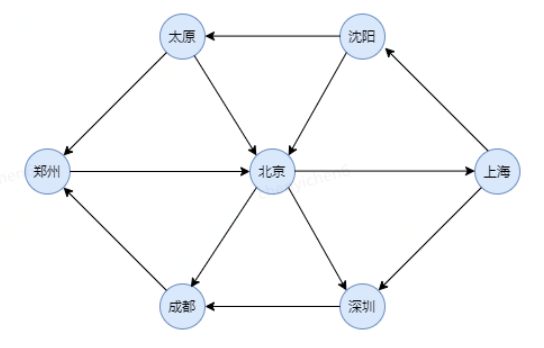
1)鄰接矩陣
表示圖的一種簡單的方法是使用一個二維資料,稱為鄰接矩陣表示法,有一個二維陣列A,對于每條邊(u,v),置A[u][v]等于true;否則陣列元素就是false,如果邊有一個權,那么可以置A[u][v]等于該權,而使用很大或者很小的權作為標記表示不存在的邊,雖然這種表示方法的優點是簡單,但是,它的空間復雜度為θ(|V|^2),如果圖的邊不是很多(稀疏的),那么這種表示的代價就太大了,代碼如下:
/**
* <p/>
* Description: 使用鄰接矩陣的圖表示法
* <p/>
* Company: <a href=www.jd.com>京東</a>
*
* @author <a href=mailto:[email protected]>pankun8</a>
* @date 2021/11/11 15:41
*/
@Data
@NoArgsConstructor
public class Graph<T extends Node>{
/**
* 圖的節點數
*/
private int n;
/**
* 圖
*/
private T[] data;
/**
* 是否是有向圖
*/
private Boolean directed;
/**
* 鄰接矩陣
*/
private int[][] matrix;
public Graph(T[] data , Boolean directed){
this.n = data.length;
this.data = data;
this.directed = directed;
matrix = new int[n][n];
}
public void init(T[] data , Boolean directed){
this.n = data.length;
this.data = data;
this.directed = directed;
matrix = new int[n][n];
}
/**
*
* @param v 起點
* @param w 終點
* @param value 權重
*/
public void addEdge(int v , int w , int value){
if((v >=0 && v < n) && (w >= 0 && w < n)){
if(hasEdge(v,w) == value){
return;
}
matrix[v][w] = value;
if(!this.directed){
matrix[w][v] = value;
}
n ++;
}
}
//判斷兩個節點中是否以及存在邊
public int hasEdge(int v, int w){
if((v >=0 && v < n) && (w >= 0 && w < n)){
return matrix[v][w];
}
return 0;
}
/**
* 狀態轉移函式
* @param index
* @param value
* @return
*/
public int stateTransfer(int index , int value){
int[] matrix = this.matrix[index];
for (int i = 0; i < matrix.length; i++) {
if(matrix[i] == value){
return i;
}
}
return Integer.MAX_VALUE;
}
}
2)鄰接表
如果圖是稀疏的,那么更好的解決辦法是使用鄰接表,
2.3 圖的搜索演算法
從圖的某個訂單出發,訪問途中的所有頂點,并且一個頂點只能被訪問一次,圖的搜索(遍歷)演算法常見的有兩種,如下:
- 深度優先搜索演算法(DFS)
- 廣度優先搜索演算法(BFS)
3 資料結構與演算法
3.1 BF(Brute Force)演算法
3.1.1 演算法介紹
BF(Brute Force)演算法也可以叫暴力匹配演算法或者樸素匹配演算法,
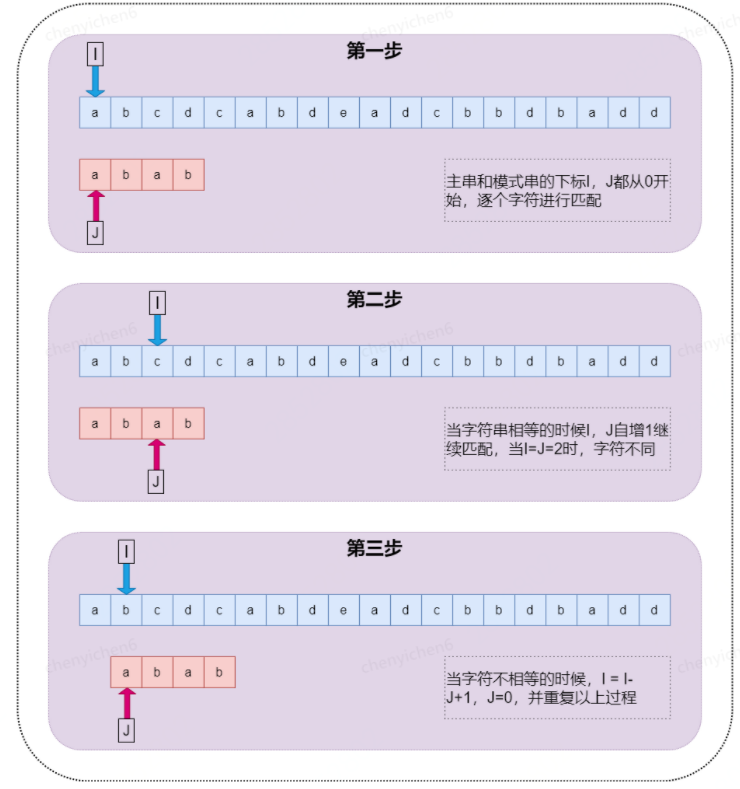
3.1.2 演算法程序
在講解演算法之前,我們先定義兩個概念,方便后面講解,他們分別是主串(S)和模式串(P),比如說要在字串A中查找字串B,那么A就是主串,B就是模式串,我們把主串的長度記作n,模式串的長度記作m,并且n>m,演算法程序如下圖:
3.1.3 演算法分析
BF演算法從很“暴力”,當然也就比較簡單,好懂,但是回應的性能也不高極端情況下時間復雜度函式為O(m*n),
盡管理論上BF演算法的時間復雜度很高,但在實際的開發中,它卻是一個比較常用的字串匹配演算法,主要原因有以下兩點:
- 樸素字串匹配演算法思想簡單,代碼實作也非常簡單,不容易出錯,容易除錯和修改,
- 在實際的軟體開發中,模式串和主串的長度都不會太長,大部分情況下,演算法執行的效率都不會太低,
3.2 RK(Rabin-Karp)演算法
3.2.1 演算法介紹
RK演算法全程叫Rabin-Karp演算法,是有它的兩位發明者Rabin和Karp的名字來命名,這個演算法理解并不難,他其實是BF演算法的升級版,
3.2.2 演算法程序
3.2.3 演算法分析
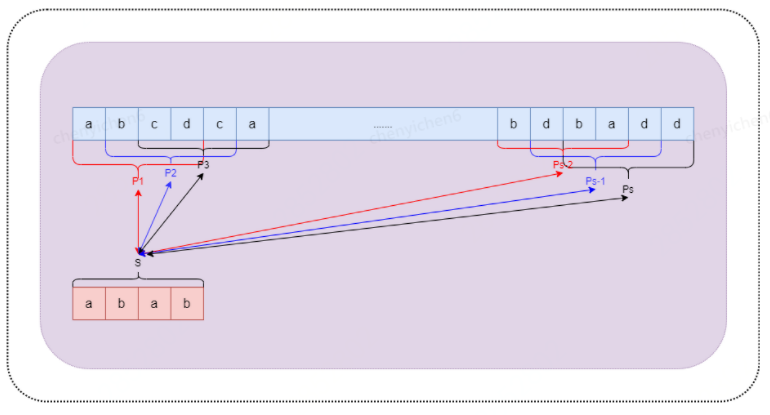
在BF演算法中當字串不匹配時,需要比對每一個字符,如果不能匹配則重新調整I,J的值重新比對每一個字符,RK的思路是將模式串進行哈希演算法得到s=hash(P),然后將主串分割成n-m+1個子串,分別對其進行hash演算法,然后逐個和s進行比對,減少逐個字串比對的次數,其中hash函式的具體實作可自行選擇,
整個RK演算法包含兩部分:
- 計算模式串哈希和子串的哈希;
- 模式串哈希和子串哈希的比較;
第一部分的只需要掃描一遍主串就能計算出所有子串的哈希值,這部分的時間復雜度是O(n),模式串哈希值與每個子串哈希之間的比較的時間復雜度是O(1),總共需要比對n-m+1次,所以這部分的時間復雜度為O(n),所以RK演算法的整體時間復雜度為O(n),
3.3 KMP演算法
3.3.1 演算法介紹
KMP演算法是一種線性時間復雜度的字串匹配演算法,它是對BF(Brute-Force)演算法的改進,KMP演算法是由D.E.Knuth與V.R.Partt和J.H.Morris一起發現的,因此人們稱它為Knuth-Morris-Pratt演算法,簡稱KMP演算法,
前面介紹了BF演算法,缺點就是時間消耗很大,KMP演算法的主要思想就是:在匹配程序中發生匹配失敗時,并不是簡單的將模式串P的下標J重新置為0,而是根據一些匹配程序中得到的資訊跳過不必要的匹配,從而達到一個較高的匹配效率,
3.3.2 演算法程序
在介紹KMP演算法之前,首先介紹幾個字串的概念:
- 前綴:不包含最后一個字符的所有以第一個字符開頭的連續子串;
- 后綴:不包含第一個字符的所有以最后一個字符結尾的連續子串;
- 最大公共前后綴:前綴集合與后綴集合中長度最大的子串;
例如字串abcabc
前綴集合是a,ab,abc,abca,abcab
后綴集合為bcabc,cabc,abc,bc,c
最大公共前后綴為abc
KMP演算法的程序如下圖:
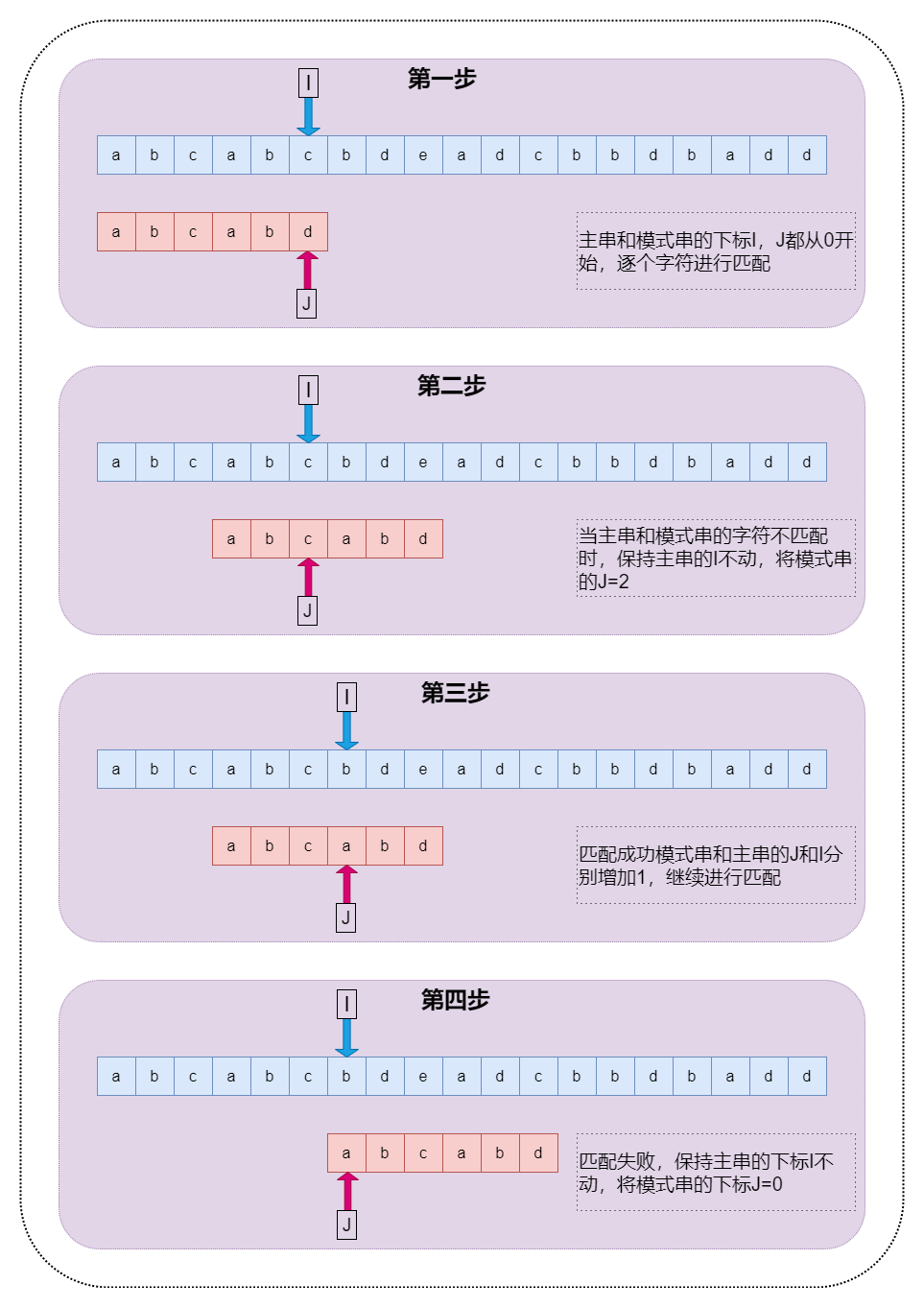
那么為什么KMP演算法會知道在匹配失敗時下標J回溯的那個位置呢?其實KMP演算法在匹配的程序中將維護一些資訊來幫助跳過不必要的匹配,這個資訊就是KMP演算法的重點,next陣列也叫做fail資料或者前綴資料,下面我們來分析next陣列的由來
對于模式串P的每個元素P[j],都存在一個實數k,使得模式串P開頭的k個字符(P[0]P[1]…P[k-1])依次于P[j]前面的k(P[j-k]P[j-k+1]…P[j-1])個字符相同,如果這樣的k有多個,則取最大的一個,模式串P中的每個位置j的字符都存在這樣的資訊,采用next陣串列示,即next[j]=MAX{k},
從上述定義中可看到next(j)的邏輯意義就是求P[0]P[1]…P[j-1]的最大公共前后綴長度,代碼如下:
public static void genNext(Integer[] next , String p){
int j = 0 , k = -1;
char[] chars = p.toCharArray();
next[0] = -1;
while(j < p.length() - 1){
if(k == -1 || chars[j] == chars[k]){
j++;k++;
next[j] = k;
}else{
k = next[k];//此處為理解難點
}
}
}
下面分析next的求解程序:
1)特殊情況
當j的值為0或者1的時候,它們的k值都為0,即next(0) = 0 、next(1) = 0,為了后面k值計算的方便,我們將next(0)的值設定為-1,
2)當P[j]==P[k]的情況
當P[j]P[k]時,必然有P[0]…P[k-1]P[j-k]…P[j-1],因此有P[0]…P[k]==P[j-k]…P[j],這樣就有next(j+1)=k+1,
3)當P[j]!=P[k]的情況
當P[j]!=P[k]時,必然后next(j)=k,并且next(j+1)<k;也就是說P[0]…P[k-1]=P[j-k]…P[j-1],因此此時k值需要向左移動重新進行匹配,next陣列的作用就是在匹配失敗時進行下標左移,所以k=next(k)進行下一輪回圈,
4)演算法優化
上述演算法有一個小問題就是當P[k]匹配失敗后會跳轉到next(k)繼續進行匹配,但是此時有可能P[k]=P[next(k)],此時匹配肯定是失敗的所以對上述代碼進行改進如下:
public void genNext(Integer[] next , String p){
int j = 0 , k = -1;
char[] chars = p.toCharArray();
next[0] = -1;
while(j < p.length() - 1){
if(k == -1 || chars[j] == chars[k]){
j++;k++;
if(chars[j] == chars[k]){
next[j] = next[k];//如果兩個相等
}else{
next[j] = k;
}
}else{
k = next[k];
}
}
}
3.3.3 演算法分析
KMP演算法通過消除主串指標的回溯提高匹配的效率,整個演算法分為兩部分,next資料的求解,以及字串匹配,從上一節的分析可知求解next陣列的時間復雜度為O(m),匹配演算法的時間復雜度為O(n),整體的時間復雜度為O(m+n),KMP演算法不是最快匹配演算法,卻是名氣最大的,使用的范圍也非常廣,
3.4 BM演算法
3.4.1 演算法介紹
Boyer-Moore字串搜索演算法是一種非常高效的字串搜索演算法,它由Bob Boyer和J Strother Moore發明,有實驗統計它的性能是KMP演算法的3-4倍,
3.4.2 演算法程序
前面介紹的BF,KMP的演算法的匹配程序雖然模式串的回溯程序不同,但是相同點都是從左往右逐個字符進行匹配,而BM演算法則是采用的從右向左進行匹配,借助壞字符規則(SKip(j))和好后綴(Shift(j))規則,能夠進行快速匹配,其中壞字符和好后綴示意如下圖
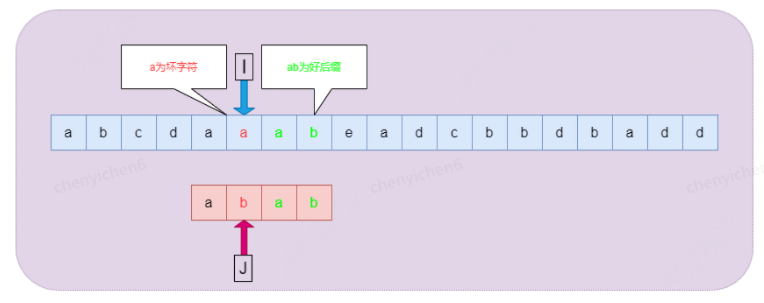
1)壞字符規則:在BM演算法從右向左掃描的程序中,若發現某個字符S[i]不匹配時,則按照如下兩種情況進行處理:
- 如果字符S[i]在模式串P中沒有出現,那么從字符S[i]開始的m個文本顯然是不可能和P匹配成功,直接全部跳過該區域,
- 如果字符S[i]在模式串P中出現,則以該字符進行對齊,
2)好后綴規則:在BM演算法中,若發現某個字符不匹配的同時,已有部分字符匹配成功,則按照如下兩種情況進行處理:
- 如果已經匹配的子串在模式串P中出現過,且子串的前一個字符和P[j]不相同,則將模式串移動到首次出現子串的前一個位置,
- 如果已經匹配的子串在模式串P中沒有出現過,則找到已經匹配的子串最大前綴,并移動模式串P到最大前綴的前一個字符,
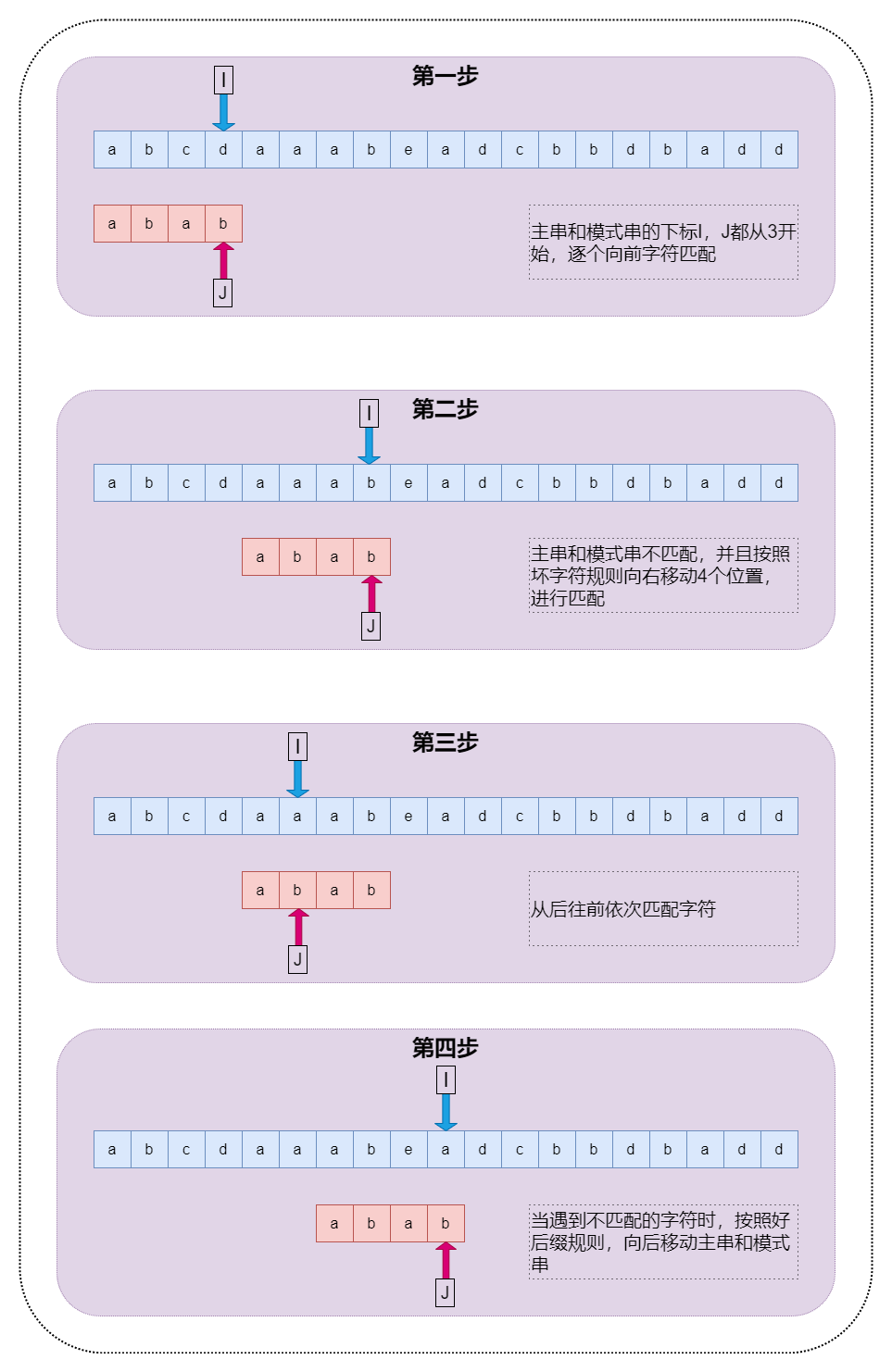
BM演算法程序如下:
3.4.3 演算法分析
在BM演算法中,如果匹配失敗則取SKip(j)與Shift(j)中的較大者作為跳躍的距離,BM演算法預處理階段的復雜度為O(m+n),搜索階段的最好的時間復雜度為O(n/m),最壞的時間復雜為為O(n*m),由于BM演算法采用的是后綴匹配演算法,并且通過壞字符和好后綴共同作用下,可以跳過不必要的一些字符,具體Shift(j)的求解程序可參看KMP演算法的next()函式程序,
3.5 TireTree
3.5.1 演算法介紹
在《搜索中常見的資料結構與演算法探究(一)》中,我們介紹過一種樹狀的資料結構叫做HashTree,本章介紹的TireTree就是HashTree的一個變種,TireTree又叫做字典樹或者前綴樹,典型的應用是用于統計和排序大量的字串,所以經常被搜索系統用于文本的統計或搜索,
TireTree的核心思想是空間換時間,TrieTree是一種高效的索引方法,它實際上是一種確定有限自動機(DFA),利用字串的公共前綴來降低查詢時間的開銷以達到提高查詢效率的目的,非常適合多模式匹配,TireTree有以下基本性質:
- 根節點不包含字符,除根節點外每個節點都包含一個字符,
- 從根節點到某一個節點,路徑上經過的字符連接起來,為該節點對應的字串,
- 每個節點對應的所有子節點包含的字符都不相同,
3.5.2 演算法程序
TireTree構建與查詢
我們以《搜索中常見的資料結構與演算法探究(一)》案例二中提到的字謎單詞為例,共包含this、two、fat和that四個單詞,我們來探究一下TireTree的構建程序如下圖:
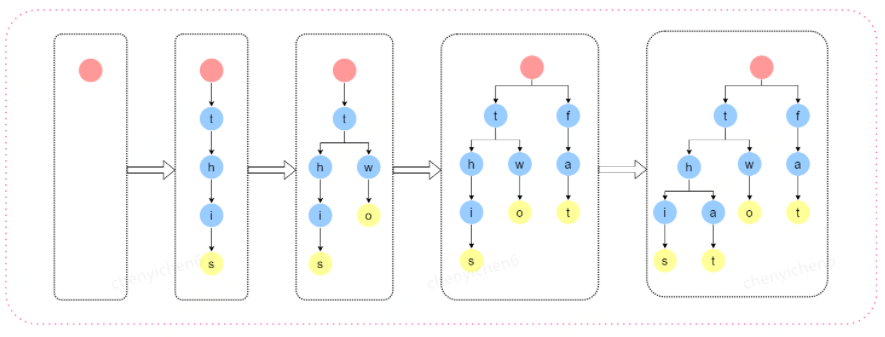
上述程序描述了that,two,fat,that四個單詞的插入TireTree的程序,其中黃色的節點代表有單詞存在,由于TireTree的構建的程序是樹的遍歷,所以查詢程序和創建程序可以視為一個程序,
3.5.3 演算法分析
TireTree由于本身的特性非常適合前綴查找個普通查找,并且查詢的時間復雜度為O(log(n)),和hash比較在一些場景下性能要優于甚至取代hash,例如說前綴查詢(hash不支持前綴查詢),
雖然TireTree的查詢速度會有一定的提升但是缺不支持后綴查詢,并且TireTree對空間利用率不高,且對中文的支持有限,
3.6 AC自動機
3.6.1 演算法介紹
AC自動機(Aho-Corasick automation)該演算法在1975年產生于貝爾實驗室,是著名的多模匹配演算法之一,要搞懂AC自動機,先得有TireTree和KMP模式匹配演算法的基礎知識,上述章節有TireTree和KMP演算法的詳細介紹,
3.6.2 演算法程序
AC自動機的構建程序需要如下步驟:
- TireTree的構建,請參看TireTree章節
- fail指標的構建 - 使當前字符失配時跳轉到具有最長公共前后綴的字符繼續匹配,如同 KMP演算法一樣, AC自動機在匹配時如果當前字符匹配失敗,那么利用fail指標進行跳轉,由此可知如果跳轉,跳轉后的串的前綴,必為跳轉前的模式串的后綴并且跳轉的新位置的深度一定小于跳之前的節點,fail指標的求解程序可是完全參照KMP演算法的next指標求解程序,此處不再贅述,
- AC自動機查找 - 查找程序和TireTree相同,只是在查找失敗的時候感覺fail指標跳轉到指定的位置繼續進行匹配,
3.6.3 演算法分析
AC自動機利用fail指標阻止了模式串匹配階段的回溯,將時間復雜度優化到了O(n),
3.7 Double-Array-TireTree
3.7.1 演算法介紹
前面提到過TireTree雖然很完美,但是空間利用率很低,雖然可以通過動態分配陣列來解決這個問題,為了解決這個問題我們引入Double-Array-TireTree,顧名思義Double-Array-TireTree就是TireTree壓縮到兩個一維陣列BASE和CHECK來表示整個樹,Double-Array-TireTree擁有TireTree的所有優點,而且刻服了TireTree浪費空間的不足,使其應用范圍更加廣泛,例如詞法分析器,圖書搜索,拼寫檢查,常用單詞過濾器,自然語言處理 中的字典構建等等,
3.7.2 演算法程序
在介紹演算法之前,我們提前簡單介紹一個概念DFA(下一篇詳細介紹),DFA(Deterministic Finite State)有限自動機,通俗來講DFA是指給定一個狀態和一個輸入變數,它能轉到的下一個狀態也就確定下來,同時狀態是有限的,
Double-Array-TireTree構建
Double-Array-TireTree終究是一個樹結構,樹結構的兩個重要的要素便是前驅和后繼,把樹壓縮在雙陣列中,只需要保持能查到每個節點的前驅和后繼,首先要介紹幾個重要的概念:
- STATE:狀態,實際是在陣列中的下標
- CODE:狀態轉移值,實際為轉移字符的值
- BASE:標識后繼節點的基地址陣列
- CHECK:標識前驅節點的地址
從上面的概念的可以理解如下規則,假設一個輸入的字符為c,狀態從s轉移到t
- state[t] = base[state[s]] + code[c]
- check[state[t]] = state[s]
構建的程序大概也分為兩種:
- 動態輸入詞語,動態構建雙陣列
- 已知所有詞語,靜態構建雙陣列
我們以靜態構建過為核心,我們以《搜索中常見的資料結構與演算法探究(一)》案例二中提到的字謎單詞為例,共包含this、two、fat和that四個單詞為例,其中涉及都的字符集{a,f,h,i,o,s,t,w}共8個字符,為了后續描述方便,我們對這個八個字符進行編碼,分別是a-1,f-2,h-3,i-4,o-5,s-6,t-7,w-8
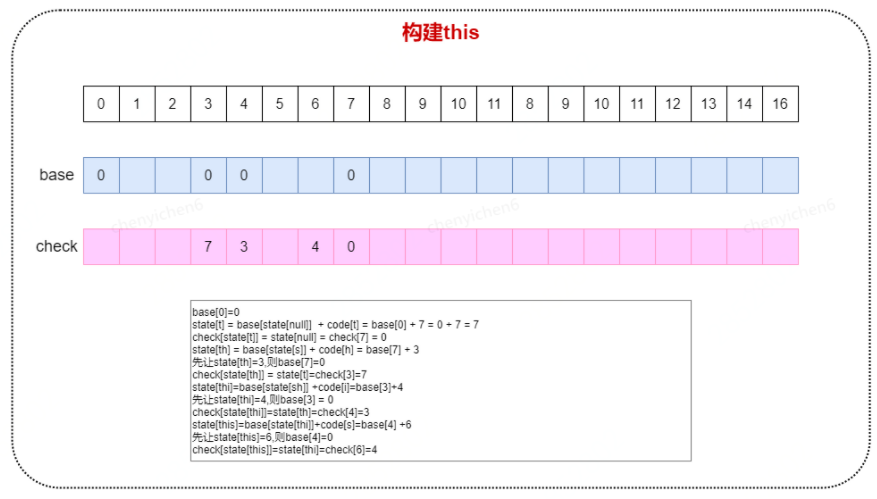
構建this,如下圖
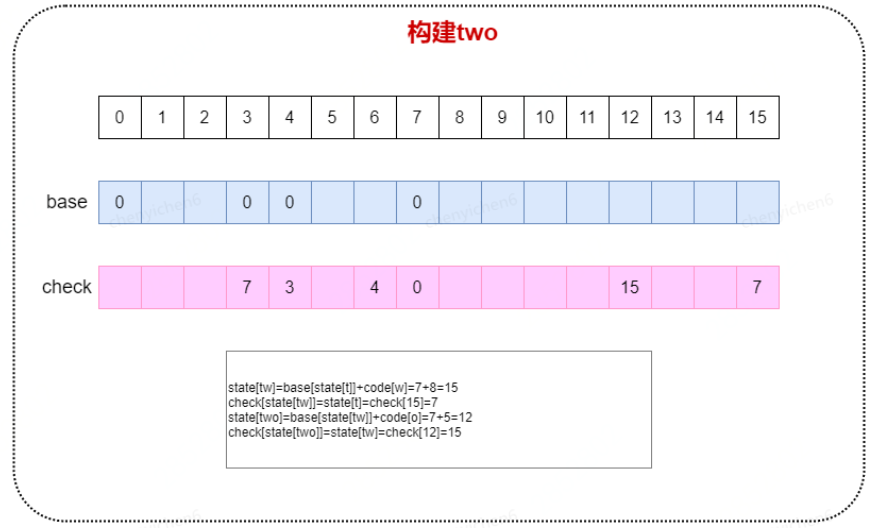
構建two,如下圖
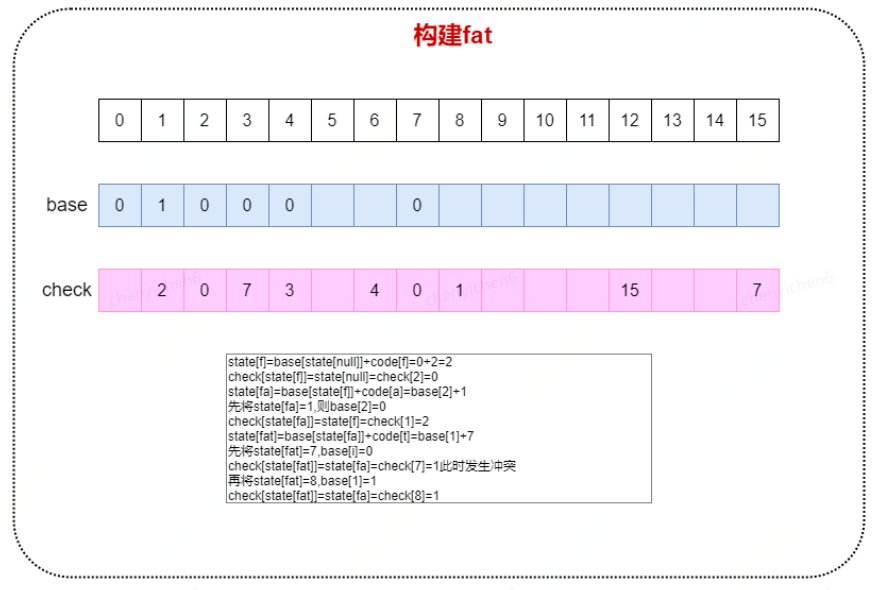
構建fat,如下圖
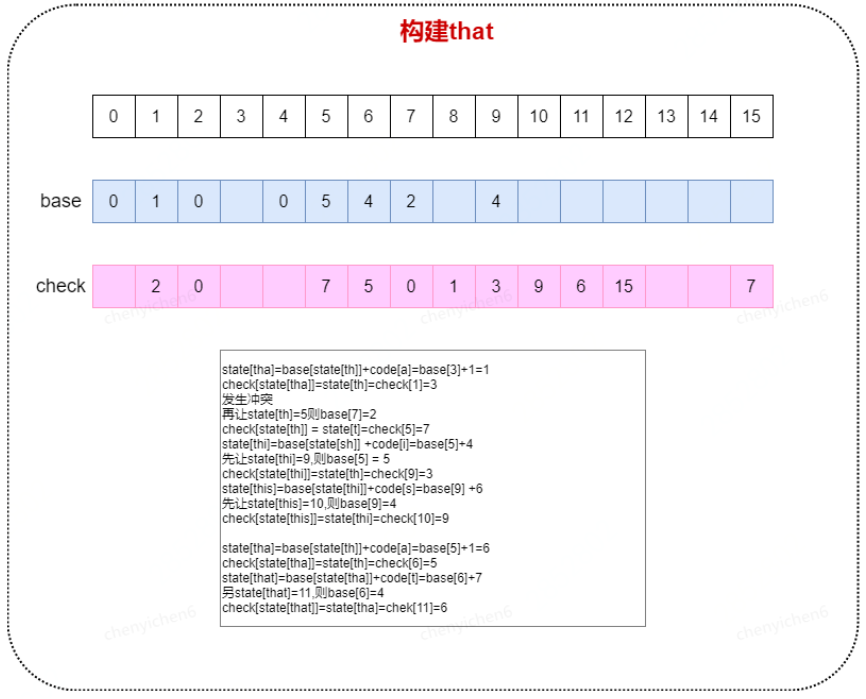
構建that,如下圖
Double-Array-TireTree查詢
驗證this是否在范圍內如下程序
1)state[t] = base[state[null]]+code[t]= 0 + 7=7
check[7]=state[null]=0通過
2)state[th] = base[state[t]]+code[h]=base[7]+3 =2+3=5
check[5]= state[t] = 7通過
3)state[tha] = base[state[th]]+ code[a]=base[5]+1=5+1=6
check[6]=state[th]=5通過
4)state[that] = base[state[tha]]+t = base[6]+7=11
check[11]=state[tha]=6通過
3.7.3 演算法分析
通過兩個資料base和check將TireTree的資料壓縮到兩個陣列中,既保留了TireTree的搜索的高效,又充分利用了存盤空間,
3.8 其他資料結構
鑒于篇幅有限,DFA,FSA以及FST將在下一篇文章中再來一起討論,敬請期待!
4 參考資料
參考書籍
《資料結構與演算法分析:java語言描述》
《自動機理論、語言和計算導論》
本篇文章對本系列的上一篇文章的常見資料結構做了補充,介紹了非線性資料結構的最后一種,圖資料結構作為基本資料結構最復雜的一種,在多種企業級應用中都有使用,如網路拓撲,流程引擎,流程編排;另外本文重點介紹了幾種常見的匹配演算法,以及演算法的演程序序和使用場景,為下一篇的主題,也是本系列的重點探究的目標,“搜索”做一個鋪墊,敬請期待!
作者: 潘坤 鄭冰 曹東杰
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/514106.html
標籤:其他