井下無人機長時間在惡劣環境下執行勘測、救援任務,通訊系統可能會陷入兩難的境地——傳輸高精度坐標伴隨著大量耗能,為解決這項難題,中國礦業大學計算機科學和技術學院陳朋朋教授團隊提出了一種基于超寬帶(UWB)和慣性測量單元(IMU)融合的按需精確跟蹤框架(On-demand Precise Tracking),
按需耗能 不做無用功
OPT對井下無人機的通訊耗能實作了按需分配,并且在精確測距、抗多徑效應和穿透能力方面優勢顯著,
首先,設計了基于多傳感器融合的無跡卡爾曼濾波器,實作具有定制性能的能量高效跟蹤,其次,OPT提供了一種超寬帶信號傳輸的自適應調整機制,以在井下無人機本地定位的精度和能耗之間進行權衡,最后,提出了一種用于無人機遠程跟蹤的按需觸發演算法,以確定資料是否傳輸到地面服務器,特別是在復雜的煤礦中,由于丟包的存在,對按需觸發條件進行改進,
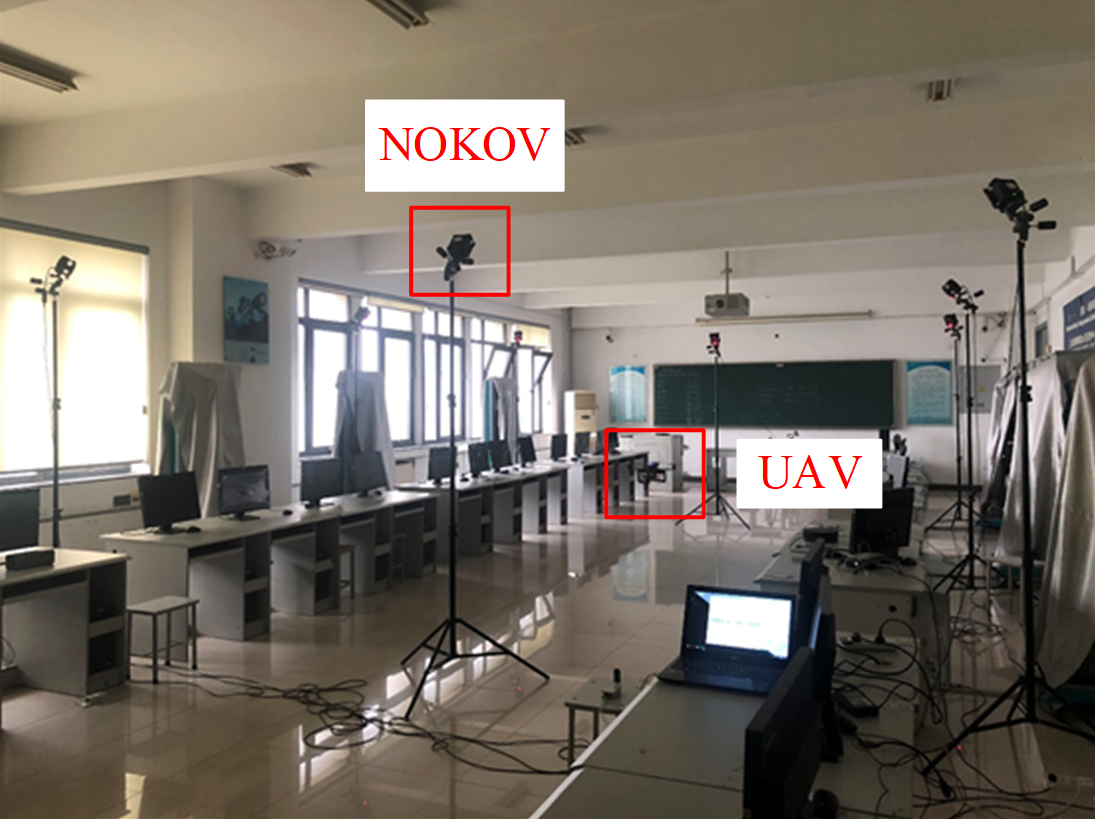
OPT模型在Gazebo平臺上進行了大量模擬實驗,并在室內和井下實驗室,采用P440超寬帶進行了實地實驗,通過NOKOV度量動捕系統獲取資料真值,驗證其可行性,
OPT 在模擬場景下表現優異
井下無人機追蹤實驗由4個位置已知的UWB基站,以及1個搭載UWB移動節點和IMU的無人機組成,8個NOKOV度量 MARS鏡頭分別固定在室內房間及巷道四周,實時提供亞毫米精度的位置資訊,作為OPT追蹤性能的評價標準,
室內無人機定位實驗

井下巷道無人機定位實驗
無人機分別在室內和巷道內飛行,UWB移動節點不斷與周圍的4個UWB基站進行通信以提供無人機到基站的距離資訊,IMU提供無人機的加速度以及角速度資訊,從而利用OPT進行無人機的位置追蹤,
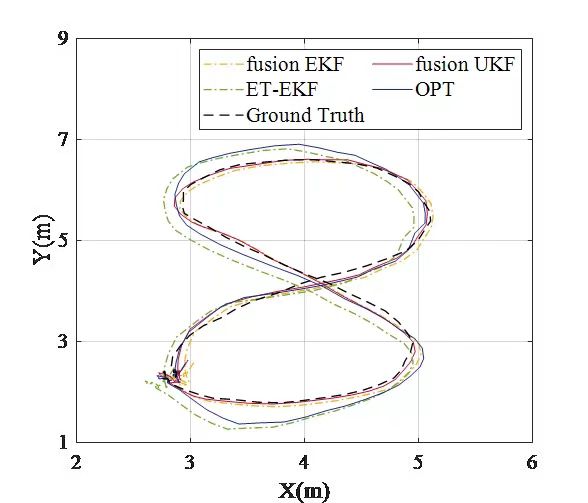
井下無人機遠程追蹤飛行軌跡圖
結果表明,OPT能夠在降低40%通信率的情況下,提供0.3米的追蹤精度,并降低20%的通信能量消耗,實作了低耗能高精度的井下無人機作業,
參考文獻:
[1] K. Zhang, P. Chen, T. Ma and S. Gao, "On-Demand Precise Tracking for Energy-Constrained UAVs in Underground Coal Mines," in IEEE Transactions on Instrumentation and Measurement, vol. 71, pp. 1-14, 2022, Art no. 5500814, doi: 10.1109/TIM.2022.3146925.
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/514255.html
標籤:其他