對CART決策樹剪枝程序的理解
前言:CART決策樹生成的程序比較好理解,但是剪枝的程序看了好幾遍才看明白,故寫出下文,供同樣困惑的朋友參考,下文不涉及復雜嚴密的數學推導,以輔助理解為主,
一. 損失函式的定義方法
CART的損失函式用的是下式:
\[C_\alpha(T)=C(T)+\alpha |T| \tag{1} \]損失函式表征的是模型預測錯誤的程度,所以它越小越好,
上式中\(C_\alpha (T)\) 是關于 \(T\) 和 \(\alpha\) 的函式,\(T\) 表示一個決策樹,\(C(T)\) 是對訓練資料的預測誤差(分類用基尼指數表示,回歸用均方誤差表示),\(|T|\) 表示樹 \(T\) 的葉節點個數,$\alpha $ 是一個常數,用來平衡模型對資料的擬合程度(由\(C(T)\)項決定)和 模型的復雜度(\(\alpha|T|\)項決定,復雜度也就是樹的分支多不多),
如果 \(\alpha\) 非常小,那么損失函式 \(C_\alpha(T)\) 的值大小由 \(C(T)\) 決定,為了使損失函式的值小,\(C(T)\) 也就會趨于小,也就是多分枝,充分延展樹(因為我們生成樹時,選擇屬性的標準就是使基尼指數或者均方誤差減小的最多,所以充分分枝意味著更小的 \(C(T)\));
反之,如果 \(\alpha\) 充分大,那么損失函式 \(C_\alpha(T)\) 的值大小由 \(\alpha |T|\) 決定,為了使損失函式的值小, \(|T|\) 也就會趨于小,而最小的樹就是只有一個節點,所以此時剪枝成一個單節點樹,\(|T|=1\) ,
總而言之,\(\alpha\) 越大,在損失函式的影響下,模型趨向于少分枝,\(\alpha\)越小,模型越趨向于多分枝,
二. 剪枝的程序
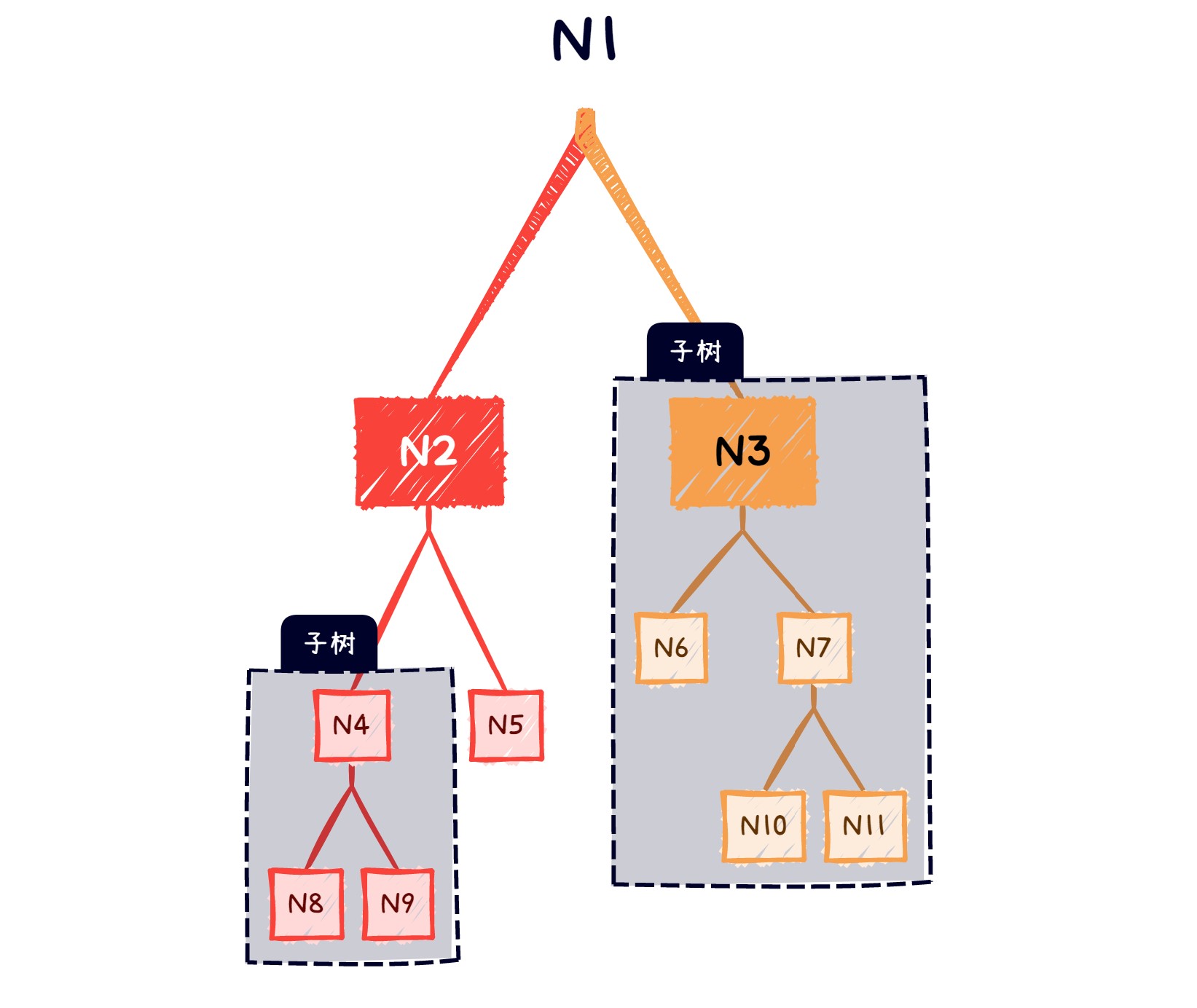
假設通過CART生成一個完整的樹\(T_0\),如下:
剪枝的整體思路是:
-
每次樹所有的內結點(不是葉結點的結點,如上示樹的N4,N2,N3,N7,N1),得出最適合剪枝的結點并對其剪枝,得到一個子樹 \(T_i\) ,然后再分析 \(T_i\) 的所有內結點,找出 \(T_i\) 最適合剪枝的結點并對其剪枝,得到子樹 \(T_{i+1}\);
\(\cdots\)
-
重復至最終得到的子樹只剩下三個結點(一個根結點連著兩個葉結點),如果這個程序中,我們得到了 k+1 個子樹(注意,每次剪完枝得到的子樹都要存盤起來),不妨記作 {\(T_0,T_1,\cdots,T_k\)};
-
最后使用交叉驗證,看看哪個樹的性能最好,我們就選擇哪個樹,
核心步驟是第一步,以下給出具體解釋和方法:
第一部分我們分析過:\(\alpha\) 越大,越趨向于多分枝;\(\alpha\) 越小,越趨向于少分枝,所以,必定存在一個\(\alpha\),使得分不分枝都可以(分枝與不分枝的損失函式值相同),我們記這個\(\alpha\) 為 \(\alpha_0\),所以,我們只需要依次將樹的內結點和它的子節點組成的子樹拿出來(比如上示樹中標示出來的以 \(N3\) 為根節點和以 \(N4\) 為根節點的子樹),計算它的 \(\alpha_0\) ,對于全部的內結點,我們得到一組 \(\alpha_0\) 值,然后選擇其中最小的 \(\alpha_0\) 對應內結點,并對其剪枝,
這句話需要稍微轉個彎才能理解,為什么要選擇 \(\alpha_0\) 最小的結點剪枝呢?假設我們選擇了一個大于 \(min(\alpha_0)\) 的值 \(\alpha'\) 作為閾值,那么對于 剪枝閾值α0 小于 α′ 的結點,他們都處于 “趨向于不分枝“ 的狀態,也就是需要剪枝,這樣就會有多個結點需要剪枝,但是我們不能確保這些需要被剪枝的結點都是不相關的(剪掉一個后對另一個結點沒有影響),所以我們需要控制每次只剪一個結點的枝,選擇最小的\(\alpha_0\)對應的結點剪枝,就是為了控制每次只剪掉一個結點的枝,因為在損失函式是\(C_\alpha(T)=C(T)+\alpha_0 |T|\)的情況下,其他結點都處于 ”趨向于多分枝的狀態“ ,
Breiman對此有嚴密的數學證明,感興趣可以看看,
接下來就是確認每個內結點的\(\alpha_0\),注意,確認每個內結點的\(\alpha_0\)需要將該結點作為根節點的子樹單獨拿出來研究,以 \(N4\) 結點為例,首先我們把它作為根節點的子樹拿出來:
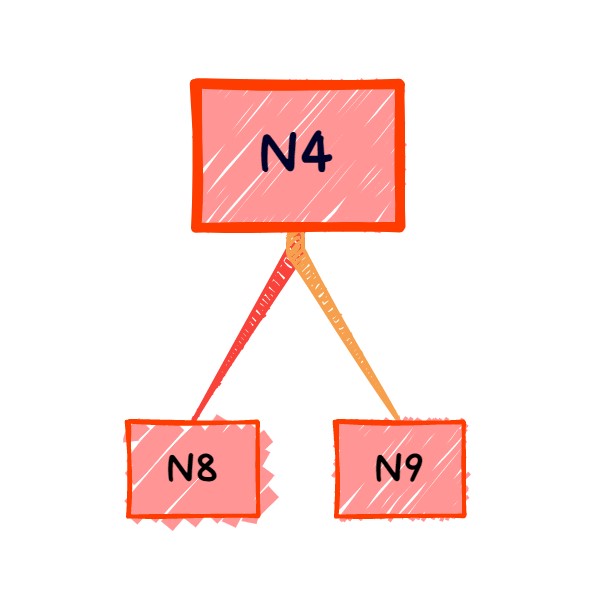
不剪枝,它的損失函式是:
\[C_\alpha(T_{N4})=C(T_{N4})+\alpha |T_{N4}|\\ T_{N4}表示以N4為根節點的子樹,|T_{N4}|表示T_{N4}的葉結點數,這里等于2,但是為了得到通式,這里寫為|T_{N4}| \tag{2} \]剪枝后,它只剩下 N4 一個結點,光桿司令,這時候損失函式是:
\[C_\alpha(N4)=C(N4)+\alpha ,N4表示只有N4這個節點的樹 \tag{3} \]找“剪不剪枝都可以的\(\alpha\)” ,也就是找 \(C_\alpha(T_{N4})=C_\alpha(N4)\) 的 \(\alpha\) ,故有
\[C(T_{N4})+\alpha |T_{N4}|=C(N4)+\alpha \\ 得到:\alpha=\frac{C(N4)-C(T_{N4})}{|T_{N4}|-1} \tag{4} \]可得,對于任意結點\(t\),記以 \(t\) 為根節點的子樹為\(T_t\) ,只有 \(t\) 一個結點的樹直接記為 \(t\) ,則得到計算結點 \(t\) “剪不剪枝都可以的\(\alpha\)” 的公式:
\[\alpha=\frac{C(t)-C(T_t)}{|T_t|-1} \tag{5} \]問題得解:我們對每個內結點都用式 (5) 找出它”剪不剪枝都可以“ 的臨界\(\alpha_0\),然后篩選出最小的 \(\alpha_0\) 對應的內結點剪枝,
三. CART 剪枝演算法
輸入:CART演算法生成的決策樹\(T^0\)
輸出:最優決策樹 \(T_\alpha\)
-
設 \(k=0\)
-
設\(\alpha_t = +\infin\)
-
對樹,\(T^k\)各個內部節點 \(t\) 計算\(C(T_t)\) ,\(T_t\) 以及
\[\alpha(t) = \frac{C(t)-C(T_t)}{|T_t|-1}\\ \alpha_t = min(\alpha,\alpha(t)) \]\(T_t\) 是以t結點為根節點的子樹,\(t\)代表結點t,也表示只有 \(t\) 一個 結點的樹,\(C(T_t)\) 是訓練資料的預測誤差(可以用基尼指數或者均方誤差表征),\(|T_t|\) 是\(t\)為根節點的子樹的葉結點數,
-
對\(\alpha(t)=\alpha\)的內部結點\(t\) 進行剪枝,對于剪枝后的結點\(t\) 采用多數表決法確認其類別,得到樹 \(T^{k+1}\)
-
\(k=k+1\)
-
重復 3-5 ,直到\(T^k\)是一個三結點樹(一個根節點兩個葉結點)
-
對于得到的子樹序列\({T_0,T_1,\cdots,T_n}\),采用交叉驗證法選出最優子樹\(T_\alpha\)
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/517772.html
標籤:其他
上一篇:資料結構基礎—串
下一篇:一鍵上手時下最火AI作畫工具