隨著機器人、三維影片、虛擬現實等產業的發展,關于仿生機器人的動作研究早已成為重要的熱點課題,如何讓機器人或虛擬人物做出合理、流暢的姿態呢?這就要涉及到逆運動學演算法研究,
人體很復雜,傳統演算法需優化
由于人體逆運動學問題十分復雜,傳統演算法普遍面臨兩大難題:要么在反復迭代后求得的解準確度不高;要么只能求得特定情況下的引數,如何獲得一種更普遍適用、結果更精準、程序更快速的演算法成為了研究者的熱門課題,
利用動作捕捉,將復雜人體轉化為關節模型
人體如此復雜,研究者往往會根據關節將其分別視為若干部分,因此,能否獲得精準、詳細的動作資料,建立準確的關節模型,成了研究的必備基礎,而光學動作捕捉系統憑借其高精準度、高實時性、讓捕捉物件可以自由運動的特性,成為了此類研究的首選,
在中原工學院電子資訊學院針對逆運動學演算法的研究中,研究者利用NOKOV度量光學三維動作捕捉系統,獲取精度達1mm的人體下肢運動資料,并建立了準確的關節模型,
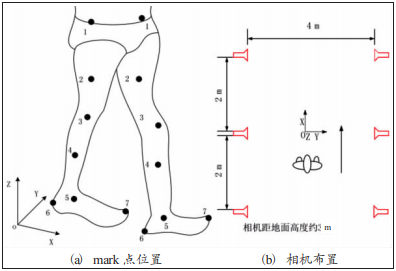
實驗現場的marker與動作捕捉鏡頭布置示意圖
實驗中的動作捕捉系統主要由6個NOKOV Mars 2H鏡頭、分配在下肢主要關節處的marker、三維測力平臺、定位桿和校正桿等組成,在約為7M×5M的實驗環境中,動作捕捉系統以每秒100幀的速率記錄著所有mark點的空間坐標,

中原工學院實驗現場
獲取的坐標資料經過特定演算法,可建立為人體在運動中的關節模型,研究人員又將人體下肢視為髖關節、膝關節、踝關節、大腿和小腿五個區域坐標系,從而將人體的運動學問題轉化為關節模型的運動方程求解問題,研究關節模型,讓機器人更加靈動
在建立關節模型之后,研究人員結合回圈坐標下降(CCD)演算法和BFGS演算法,利用動作捕捉得到的人體運動數值,計算出可以滿足實際動作要求的關節旋轉角度,其誤差閾值和平均執行時間都明顯優于傳統演算法,
光學動作捕捉系統基于其精準性、實時性和靈活適用性,對仿生機器人領域的學科研究和行業應用都能提供有力的支持,助力機器人邁出突破性的步伐,
該用戶已根據該實驗發表了論文,證明了實驗的有效性:
[1]蔡飛,胡寧寧,盧俊蘭.基于人體運動建模的逆運動學演算法研究[J].企業科技與發展,2019(03):76-78.
[2]王璦琿,胡寧寧,喻俊,盧俊蘭,葛祎霏.基于步態資料的機器人魯棒自適應PD控制[J/OL].控制工程:1-9[2022-10-21].DOI:10.14107/j.cnki.kzgc.20190609.
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/518813.html
標籤:其他
上一篇:[征途外掛制作記三]
下一篇:智能3D可視化,讓礦山遠離臟亂危