軟體機械臂的傳統剛性機械臂由于靈活度和安全性等原因,在一些狹窄復雜的特殊場景下不適合應用,隨著新材料的不斷發展,具有更高靈活性的軟體機器人研究引發熱潮,軟體機器人靈感來源于自然界中仿生動物,比如模仿蛇、象鼻、章魚臂等結構的仿生機器人等,可以適應復雜的環境,并且能進行柔順、安全的操作和抓取,
軟體機械臂涵蓋了包括仿生學、材料科學和機器人等在內的多學科,目前仍處于起步階段,許多為題還未被解決,或需要進一步研究和優化,包括智能材料、傳感技術、模型建立和運動控制等,其關鍵問題集中在運動重復精度、輸出力、建模和演算法優化等幾個方面,
在進行軟體機械臂的設計研究程序中,需要利用機器人的狀態資料來評估其性能,考慮到軟體機械臂結構及運動方式的特殊性,很多設備不適于在實驗中獲取資料,光學動作捕捉系統可以通過在機械臂上粘貼無線輕質標識點,跟蹤標識點來獲取機械臂的運動資料,具有測量精度高、對被測物影響小的特點,被很多學者和研究院所作為軟體機械臂的測量設備,
1.提高軟體機械精度
軟體材料很容易受到環境影響發生變形,從而影響精度,吉林大學從力平衡的角度,提出了一種具有恒定曲率的柔性手術器械的結構[1],可以快速精確回應指令,滿足實時手術的主從控制要求,為了驗證該軟體機械臂在精細操作下的性能,研究人員進行了原型機實驗驗證,醫生主手控制軟體機械臂在目標位置抓取圓環,實驗中將反游標志點分別固定在主手和器械的末端執行器上,采用NOKOV度量動作捕捉系統實時獲取主手(醫生控制)和從動手術器械的運動軌跡資訊作為實驗結果,對比預期軌跡與實際軌跡結果,
2.增加軟體機械臂輸出力
軟體材料柔順變形同時帶來輸出力低的問題,莫納什大學設計了一種折紙增強的軟體體機器人[2],它能在任何彎曲狀態下夠保持末端執行器的方向,在原型機實驗驗證中,在折紙外殼的中心線上布置一列反游標識點,并利用光學動作捕捉系統測量機器人形狀的變化,

亞利桑那州立大學設計了一種基于織物的可穿戴軟體機械臂[3],這種軟體機械臂使用由高強度充氣織物制成的軟致動器,為佩戴者提供移動操作輔助,研究人員將基于織物的部件行為作為輸入壓力的函式,提出了一套系統的設計規則,這些設計規則是通過計算有限元法(FEM)模型,研究一系列引數生成的,重點是軟體機械臂在3D空間中的鉸接能力和有效載荷能力,為了驗證機械臂的有效載荷,進行了實驗驗證,并進行了額外評估,驗證機械臂可以安全承載其體重10.1倍的載荷的能力,為了比較有限元模型和原型機結果,使用動捕系統獲取機械臂在進行準靜態加壓時末端的運動狀態,
3.柔性傳感器設備和演算法開發
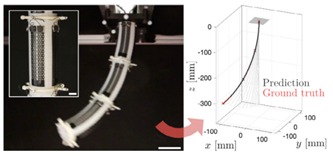
香港中文大學提出了一種用于軟體機械臂的新的3D 形狀傳感演算法[4],用于使用多芯光纖布拉格光柵 (FBG) 傳感器,為了解決長而靈活的機械臂在傳感種信號噪聲和環境擾動的問題,引入了一種新穎且通用的基于模型的濾波技術,利用光纖中多芯 FBG 的配置進行迭代曲率/扭曲估計,以消除噪聲,此外,引入了一種增強的移動平均方法來平滑光纖上估計的曲率和扭曲空間,研究人員使用與多芯 FBG傳感器集成的機器人輔助結腸鏡系統的實驗來驗證演算法,為了獲取不同工況下軟體機械臂狀態的真實值(ground truth),在軟體機械臂上粘貼了多組標識點,使用動捕系統進行跟蹤,
上海交通大學提出了一種集成了碰撞檢測、定位和力估計的方法,用于線驅動的軟體機械臂[5],首先利用測力傳感器和光學動作捕捉系統分別獲得的索力資訊和形狀資訊,通過將基于Cosserat桿的靜力學計算得到結果與反饋資訊分別獲得的理論形狀和實際形狀之間的差異來檢測碰撞,
麻省理工學院開發了一個框架,用于通過軟傳感器皮膚實作的分布式本體感知來學習軟體機械臂的3D配置[6],利用經過訓練的RNN可以預測軟體機械臂在規定和隨機驅動序列中的穩態配置,即使有來自非單調、滯后、軟壓阻傳感器的反饋,動作捕捉系統用來記錄軟體機械臂各關節的位置姿態資料,
未來人類與環境的互動將會逐漸向柔性的方向發展,比如人機協作、物體操作和復雜非機構環境適應等,最合適的方式就是充分理解并利用柔性軟體結構,雖然現在關于軟體機械臂已經取得了很多進展和成果,但是仍有待進一步的研究,而利用光學動作捕捉系統在內的實驗設備獲取準確而可靠的運動資訊,可以提供更充分的分析資料,加快研究行程,未來也會更廣泛的部署在軟體機械臂研究中,
參考文獻
[1] Feng M, Ni Z X, Li A, et al. Master manipulator optimisation for robot assisted minimally invasive surgery[J]. The International Journal of Medical Robotics and Computer Assisted Surgery, 2021, 17(2): e2208.
[2] Troeung C, Chen C. A Translational Parallel Continuum Robot Reinforced by Origami and Cross-Routing Tendons[C]//2021 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2021: 7039-7045.
[3] Nguyen P H, Mohd I B I, Sparks C, et al. Fabric Soft Poly-Limbs for Physical Assistance of Daily Living Tasks[C]//2019 International Conference on Robotics and Automation (ICRA). IEEE, 2019: 8429-8435.
[4] Lu Y, Lu B, Li B, et al. Robust Three-Dimensional Shape Sensing for Flexible Endoscopic Surgery Using Multi-Core FBG Sensors[J]. IEEE Robotics and Automation Letters, 2021, 6(3): 4835-4842.
[5] Wang Y, Wang H, Xu F, et al. Towards Collision Detection, Localization and Force Estimation for a Soft Cable-driven Robot Manipulator[C]//2021 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2021: 12222-12228.
[6] Truby R L, Della Santina C, Rus D. Distributed Proprioception of 3D Configuration in Soft, Sensorized Robots via Deep Learning[J]. IEEE Robotics and Automation Letters, 2020, 5(2): 3299-3306.
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/520649.html
標籤:其他
下一篇:9個計算機的“網路層”知識點