■ 舵機的性能
舵機 在自動控制場合被廣泛應用,舵機的輸出力矩、轉動速度、命令更新頻率等標準了舵機的作業性能,在 全國大學生智能車競賽中 ,大多數車模作品的方向控制都使用了舵機控制,在賽道上運行的車模速度,在 控制引數設定 合理的情況下,最高速度取決于舵機的回應速度,
通常,舵機的運行取決于 舵機特有的脈沖指令高電平時間寬度 ,而與脈沖指令的頻率無關,所以控制舵機的脈沖波形與掃之電機運行的PWM波形的作用是不同的,
舵機內部具有驅動電路板,保證輸出角度與脈沖指令的寬度之間呈現比例關系,舵機輸出轉角速度則取決于舵機本身內部機械結構、電機的性能、作業電壓等各種因素,
▲ 舵機指令與舵機轉軸位置
由于舵機的轉速與指令無關,所以從本質上講, 舵機不是一個線性模型 ,當舵機轉動角度越大,它的動態非線性就越明顯,
01舵機轉動速度與作業電壓
舵機的轉動速度越快,在智能車競賽中車模控制性能就會越好,正好手邊測驗了一個 角度編碼器 ST-3806-15-RS ,它有每周15bit的角度解析度,這款角度編碼器用于一款 雙軸機械臂 的控制中,現在正好可以用它來測驗舵機轉動的角度、角速度,依次來分析舵機作業電壓與執行速度之間的關系,
1.測量方法
選擇S-D5舵機,使用橡膠套管將舵機輸出軸與角度編碼器連接在一起,使用機械平臺將它們固定、共軸,使用 角度編碼器 ST-3806-15-RS 測驗電路模塊來讀取角度傳感器的數值,控制多級的轉動,
▲ 使用角度傳感器測量舵機旋轉速度
給定舵機脈沖指令,從1000us突變到2000us,舵機順時針旋轉60°,在這個程序中,采集角度的速率為3ms,讀取200個,得到的角度曲線如下:
取角度上升線性部分(距離最下,最上各5%的余量),進行線性擬合,再計算擬合直線與最小角度、最大角度對應的時間交點,使用這個交點之間的時間差作為舵機的執行時間,執行時間的倒數可以反映舵機輸出角速度,
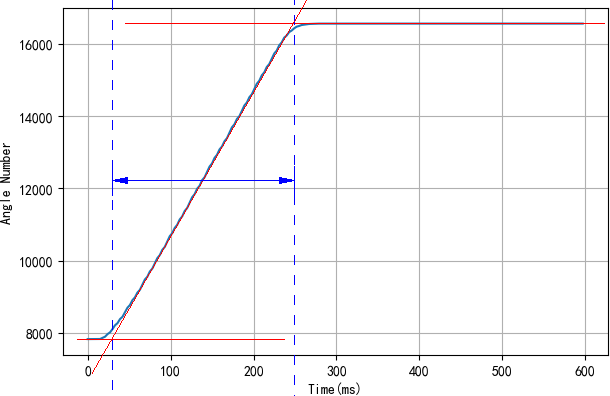
▲ 測量旋轉角度曲線對應執行時間
2.測量資料
下面使用數控直流電源調節舵機作業電壓,從4.0V ~ 6V,分成20個作業電壓點,在每個作業電壓點,測量舵機的轉動曲線,使用上面的方法,獲得舵機的轉動時間,
▲ 隨著作業電壓的增加,舵機轉動角度的曲線的變化
下圖給出了舵機轉動時間與作業電壓測量的資料曲線,作業電壓越高,舵機執行時間就越短,
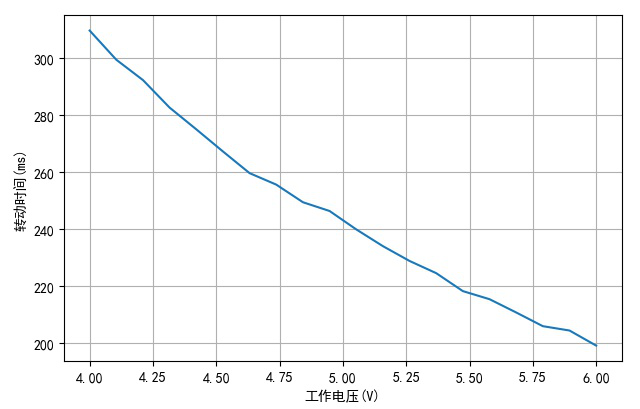
▲ 作業電壓與轉動時間之間的關系
voltagedim=[4.00,4.11,4.21,4.32,4.42,4.53,4.63,4.74,4.84,4.95,5.05,5.16,5.26,5.37,5.47,5.58,5.68,5.79,5.89,6.00]
timedim=[103.22,99.80,97.43,94.21,91.67,89.09,86.55,85.21,83.15,82.13,79.98,78.02,76.29,74.86,72.76,71.82,70.27,68.67,68.16,66.40]
將上述時間取倒數(1000/time(ms)),可以獲得下面的舵機轉動相對速度與作業電壓之間的關系,大體可以看到舵機執行速度與作業電壓成正比,
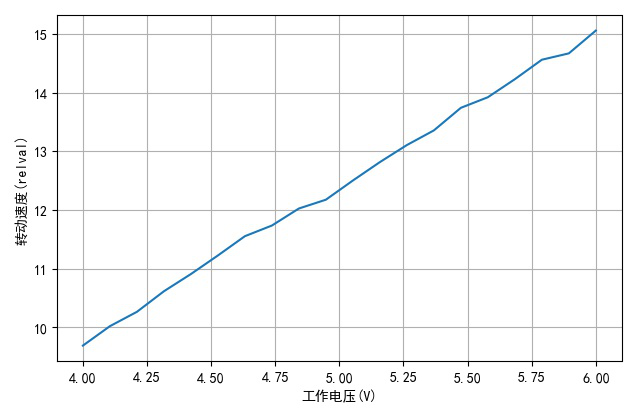
▲ 作業電壓與舵機轉動速度之間的關系
02分析結論
通過前面的分析可以看出:
- 為了提高多級的執行速度,可以在舵機允許的作業電壓范圍內盡可能提高舵機的作業電壓;
- 為了避免高的作業電壓對舵機內部的電路過壓的影響,需要在舵機作業電源進行必要的限幅和穩壓,
- 在舵機作業程序中,如果頻繁的轉動,需要考慮到舵機散熱;

▲ 舵機指令在1000us在2000us之間切換變化
此外,還可以通過在舵機輸出軸,增加執行懸臂的長度,來通過機械放大提高舵機控制車模前輪轉向的速度,
※ 測量代碼
#!/usr/local/bin/python
# -*- coding: gbk -*-
#============================================================
# TEST1.PY -- by Dr. ZhuoQing 2020-09-14
#
# Note:
#============================================================
from headm import *
from tsmodule.tsstm32 import *
from scipy.optimize import curve_fit
from tsmodule.tsvisa import *
from tsmodule.tsdraw import *
dp1308open()
#------------------------------------------------------------
def linearf(x, a, b):
return a*x+b
def ServoAngle():
stm32cmd('CLEAR')
stm32cmd('servoa')
time.sleep(3)
return stm32memo(1)
def rottime(angle):
maxangle = max(angle)
minangle = min(angle)
timedim = linspace(0, len(angle) * 3, len(angle) * 3, endpoint=False)
deltaangle = maxangle-minangle
angle = array(angle)
startangle = minangle + deltaangle * 0.05
endangle = maxangle - deltaangle * 0.05
startid = list(angle>startangle).index(True)
endid = list(angle>endangle).index(True)
angle1 = angle[startid:endid+1]
time1 = timedim[startid:endid+1]
param = (100, 0)
param, conv = curve_fit(linearf, time1, angle1, p0=param)
anglefit = linearf(time1, *param)
starttime = (minangle - param[1]) / param[0]
endtime = (maxangle - param[1]) / param[0]
return endtime - starttime
#------------------------------------------------------------
setv = linspace(4, 6, 20)
timedim = []
voltagedim = []
pltgif = PlotGIF()
for v in setv:
dp1308p6v(v)
time.sleep(1)
angle = ServoAngle()
tspsave('sample1', angle=angle)
rotatetime = rottime(angle)
printf(rotatetime)
voltagedim.append(v)
timedim.append(rotatetime)
tspsave('time', voltagedim = voltagedim, timedim=timedim)
td = linspace(0, len(angle)*3, len(angle), endpoint=False)
plt.clf()
plt.plot(td, angle)
plt.xlabel("Time(ms)")
plt.ylabel("Angle")
plt.grid(True)
plt.tight_layout()
plt.draw()
plt.pause(.1)
pltgif.append(plt)
dp1308p6v(5)
pltgif.save(r'd:\temp\1.gif')
printf('\a')
#------------------------------------------------------------
# END OF FILE : TEST1.PY
#============================================================
■ 相關文獻鏈接:
- S-D5舵機拆開看一看
- 全國智能車競賽的“變”中有“進”
- 方向控制中的動態比例值-P
- 舵機的脈沖指令的頻率對于舵機運動影響
- 舵機建模仿真
- 角度編碼器 ST-3806-15-RS
- 雙軸機械臂位置倍訓控制:STC8H1K28,42HS48EIS,BH32
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/54051.html
標籤:其他