基于stm32f103c8t6濁度計
前言
本次設計的基于stm32f103c8t6濁度計主要由硬體部分加軟體部分組成
硬體部分主要是IR333光源發射部分+紅外接收管光源接受部分+放大電路+stm32f103c8t6主控芯片+lcd1602顯示模塊組成
軟體部分主要是通過stm32cubemx配置管腳之后添加adc通道函式、lcd1602寫命令函式、lcd1602讀資料函式等生成的
一、硬體部分
發射接收及放大電路硬體部分:
LCD102顯示硬體部分:

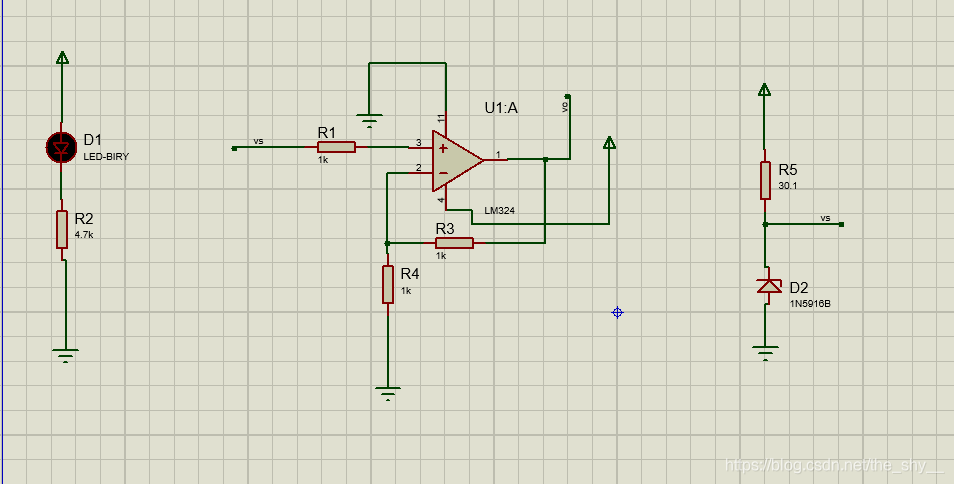
其中最主要的是信號放大電路,由于紅外接收管接受的光信號過小,所以在他輸入ad轉換器之前必須進行信號的放大放大芯片可以選用LM324,部分仿真圖如下圖所示:
二、軟體部分(主要函式塊及總代碼)
1.主函式部分
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 /
/ MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals /
MX_GPIO_Init();
MX_DMA_Init();
MX_ADC1_Init();
/ USER CODE BEGIN 2 */
HAL_ADCEx_Calibration_Start(&hadc1);
HAL_ADC_Start_DMA(&hadc1,ADC_ConvertedValue,1);
HAL_Delay(400); //延時400ms,等液晶穩定
Lcd_Init(); // 液晶初始化函式*,設定液晶的作業模式*
unsigned char IN[]={0x20,0x20,0x20,0x20,0x44,0x69,0x67,0x69,
0x74,0x61,0x6c,0x3a};
unsigned char UN[]={0x20,0x20,0x20,0x20,0x41,0x6e,0x61,0x6c,
0x6f,0x67,0x3a,0x20};
//uint8_t num[10] = {0x30,0x31,0x32,0x33,0x34,0x35,0x36,0x37,0x38,0x39}; //0-9
/* USER CODE END 2 */
/* Infinite loop /
/ USER CODE BEGIN WHILE */
unsigned char i;
unsigned int tmp;
for(i=0;i<12;i++)
{
Lcd_Write_Command(0x80+i,1) ; //定位
Lcd_Write_Data((IN[0+i])); //寫顯示資料
HAL_Delay(1); //延時10ms
}
for(i=0;i<11;i++)
{
Lcd_Write_Command(0xc0+i,1) ; //定位
Lcd_Write_Data(UN[0+i]); //寫顯示資料
HAL_Delay(1); //延時10ms
}
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
Lcd_Write_Command(0x80+12,1);//Lcd_Write_Command(0x92,1);
Lcd_Write_Data(ADC_ConvertedValue[0]/1000+0x30);
Lcd_Write_Command(0x80+13,1);
Lcd_Write_Data((ADC_ConvertedValue[0]%1000)/100+0x30);
Lcd_Write_Command(0x80+14,1);
Lcd_Write_Data((ADC_ConvertedValue[0]%100)/10+0x30);
Lcd_Write_Command(0x80+15,1);
Lcd_Write_Data(ADC_ConvertedValue[0]%10+0x30);
tmp=(unsigned int)(ADC_ConvertedValue[0]3.31000/4095);
Lcd_Write_Command(0xc0+11,1);
Lcd_Write_Data(tmp/1000+0x30);
Lcd_Write_Command(0xc0+13,1);
Lcd_Write_Data((tmp%1000)/100+0x30);
Lcd_Write_Command(0xc0+12,1);
Lcd_Write_Data(0x2e);
Lcd_Write_Command(0xc0+14,1);
Lcd_Write_Data((tmp%100)/10+0x30);
Lcd_Write_Command(0xc0+15,1);
Lcd_Write_Data(tmp%10+0x30);
}
/* USER CODE END 3 */
}
2.1602顯示字符代碼
unsigned char IN[]={0x20,0x20,0x20,0x20,0x44,0x69,0x67,0x69,
0x74,0x61,0x6c,0x3a};
unsigned char UN[]={0x20,0x20,0x20,0x20,0x41,0x6e,0x61,0x6c,
0x6f,0x67,0x3a,0x20};
//uint8_t num[10] = {0x30,0x31,0x32,0x33,0x34,0x35,0x36,0x37,0x38,0x39}; //0-9
/* USER CODE END 2 */
/* Infinite loop /
/ USER CODE BEGIN WHILE */
unsigned char i;
unsigned int tmp;
for(i=0;i<12;i++)
{
Lcd_Write_Command(0x80+i,1) ; //定位
Lcd_Write_Data((IN[0+i])); //寫顯示資料
HAL_Delay(1); //延時10ms
}
for(i=0;i<11;i++)
{
Lcd_Write_Command(0xc0+i,1) ; //定位
Lcd_Write_Data(UN[0+i]); //寫顯示資料
HAL_Delay(1); //延時10ms
}
3.1602初始化函式
void Lcd_Init( void ) //初始化
{
Lcd_Write_Command( 0x38,1); //顯示模式設定
Lcd_Write_Command( 0x01,1); //顯示清屏
Lcd_Write_Command( 0x06,1); //顯示游標移動設定
Lcd_Write_Command( 0x0C,1); //顯示開、游標不顯示
}
4.使能脈沖函式
void Lcd_En_Toggle(void) //發使能脈沖,液晶使能管腳拉高再拉低,產生上升沿,將資料線LCD_D0_Pin- LCD_D7_Pin的電平資料,寫入44780芯片
{
HAL_GPIO_WritePin(LCD1602_E_GPIO_Port,LCD1602_E_Pin,GPIO_PIN_SET);//LCD1602_E_Pin管腳拉高
HAL_Delay(5); //延時5ms
HAL_GPIO_WritePin(LCD1602_E_GPIO_Port,LCD1602_E_Pin,GPIO_PIN_RESET); //LCD1602_E_Pin管腳拉低
}
5.測忙函式
void Lcd_Busy(void)//判斷液晶是否忙,不忙才能往里面寫資料
{
unsigned int later0=0;//判斷是否忙的等待計數器
GPIO_InitTypeDef GPIO_InitStruct = {0};//以下7句話將 LCD_D7_Pin管腳置為輸入模式;該管腳是判斷忙與否的管腳
__HAL_RCC_GPIOB_CLK_ENABLE();
GPIO_InitStruct.Pin = LCD_D7_Pin ;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
CLE_RS; HAL_Delay(1); //RS = 0,延時1ms
SET_RW; HAL_Delay(1);//RW = 1 ,延時1ms
SET_EN; HAL_Delay(1); // EN = 1,延時1ms
while ((HAL_GPIO_ReadPin(GPIOB,LCD_D7_Pin))&&(later0<10)) //回圈等待忙檢測埠 = 0;或者等10毫秒再退出,避免永遠等待
{
HAL_Delay(1); //延時1ms
later0++;
}
CLE_EN; //EN = 0
//恢復 LCD_D7_Pin管腳為輸出狀態
__HAL_RCC_GPIOB_CLK_ENABLE();
GPIO_InitStruct.Pin = LCD_D7_Pin ;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP ;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
6.埠置入函式
void Gpio_data(unsigned char x) //LCD_D0_Pin- LCD_D7_Pin埠置入8位資料x
{
//第一步,將8個管腳都設定為0
HAL_GPIO_WritePin(GPIOB,LCD_D0_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB,LCD_D1_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB,LCD_D2_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB,LCD_D3_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB,LCD_D4_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB,LCD_D5_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB,LCD_D6_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB,LCD_D7_Pin,GPIO_PIN_RESET);
//第二步,8個管腳都設定為x的各個位
if(x&0X01)HAL_GPIO_WritePin(GPIOB,LCD_D0_Pin,GPIO_PIN_SET);//DB0,設定最低位
if(x&0X02)HAL_GPIO_WritePin(GPIOB,LCD_D1_Pin,GPIO_PIN_SET);//DB1
if(x&0X04)HAL_GPIO_WritePin(GPIOB,LCD_D2_Pin,GPIO_PIN_SET);//DB2
if(x&0X08)HAL_GPIO_WritePin(GPIOB,LCD_D3_Pin,GPIO_PIN_SET);//DB3
if(x&0X10)HAL_GPIO_WritePin(GPIOB,LCD_D4_Pin,GPIO_PIN_SET);//DB4
if(x&0X20)HAL_GPIO_WritePin(GPIOB,LCD_D5_Pin,GPIO_PIN_SET);//DB5
if(x&0X40)HAL_GPIO_WritePin(GPIOB,LCD_D6_Pin,GPIO_PIN_SET);//DB6
if(x&0X80)HAL_GPIO_WritePin(GPIOB,LCD_D7_Pin,GPIO_PIN_SET);//DB7//設定為最高位
}
6.寫入命令函式
void Lcd_Write_Command(unsigned char x,char Busy)
{
if(Busy) Lcd_Busy();
HAL_Delay(1); //延時1ms
CLE_RS; //RS = 0
HAL_Delay(1); //延時1ms
CLE_RW; //RW = 0
HAL_Delay(1); //延時1ms
Gpio_data(x); //埠置入資料
HAL_Delay(1); //延時1ms
Lcd_En_Toggle(); //發使能脈沖
HAL_Delay(1); //延時1ms
Lcd_Busy(); //測忙
}
6.寫入資料函式
void Lcd_Write_Data( unsigned char x) //向液晶里面寫入資料
{
Lcd_Busy(); //測忙
HAL_Delay(1); //延時1ms
SET_RS; //RS = 1
HAL_Delay(1); //延時1ms
CLE_RW; //RW = 0
HAL_Delay(1); //延時1ms
Gpio_data(x);
HAL_Delay(1); //延時1ms
Lcd_En_Toggle(); //發使能脈沖
HAL_Delay(1); //延時1ms
Lcd_Busy(); //測忙
}
7.總代碼
/* USER CODE BEGIN Header /
/*
- @file : main.c
- @brief : Main program body
- @attention
-
? Copyright (c) 2020 STMicroelectronics. - All rights reserved.
- This software component is licensed by ST under BSD 3-Clause license,
- the “License”; You may not use this file except in compliance with the
- License. You may obtain a copy of the License at:
-
opensource.org/licenses/BSD-3-Clause
/
/ USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include “main.h”
/* Private includes ----------------------------------------------------------/
/ USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------/
/ USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------/
/ USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------/
/ USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------/
ADC_HandleTypeDef hadc1;
DMA_HandleTypeDef hdma_adc1;
/ USER CODE BEGIN PV /
uint32_t ADC_ConvertedValue[1];
/ USER CODE END PV /
/ Private function prototypes -----------------------------------------------/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_DMA_Init(void);
static void MX_ADC1_Init(void);
/ USER CODE BEGIN PFP /
void Lcd_Init(void) ;//液晶初始化函式
void Lcd_En_Toggle(void);//液晶使能管腳拉低再拉高,將資料寫入44780芯片
void Lcd_Busy(void);//判斷液晶是否忙;不忙的時候才能往里面寫資料
void Gpio_data(unsigned char x);//設定8位的資料線的值;
void Lcd_Write_Command(unsigned char x,char Busy);//寫命令,主要用于設定顯示模式
void Lcd_Write_Data( unsigned char x);
/ USER CODE END PFP */
/* Private user code ---------------------------------------------------------/
/ USER CODE BEGIN 0 */
void Lcd_Init( void ) //初始化
{
Lcd_Write_Command( 0x38,1); //顯示模式設定
Lcd_Write_Command( 0x01,1); //顯示清屏
Lcd_Write_Command( 0x06,1); //顯示游標移動設定
Lcd_Write_Command( 0x0C,1); //顯示開、游標不顯示
}
void Lcd_En_Toggle(void) //發使能脈沖,液晶使能管腳拉高再拉低,產生上升沿,將資料線LCD_D0_Pin- LCD_D7_Pin的電平資料,寫入44780芯片
{
HAL_GPIO_WritePin(LCD1602_E_GPIO_Port,LCD1602_E_Pin,GPIO_PIN_SET);//LCD1602_E_Pin管腳拉高
HAL_Delay(5); //延時5ms
HAL_GPIO_WritePin(LCD1602_E_GPIO_Port,LCD1602_E_Pin,GPIO_PIN_RESET); //LCD1602_E_Pin管腳拉低
}
void Lcd_Busy(void)//判斷液晶是否忙,不忙才能往里面寫資料
{
unsigned int later0=0;//判斷是否忙的等待計數器
GPIO_InitTypeDef GPIO_InitStruct = {0};//以下7句話將 LCD_D7_Pin管腳置為輸入模式;該管腳是判斷忙與否的管腳
__HAL_RCC_GPIOB_CLK_ENABLE();
GPIO_InitStruct.Pin = LCD_D7_Pin ;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
CLE_RS; HAL_Delay(1); //RS = 0,延時1ms
SET_RW; HAL_Delay(1);//RW = 1 ,延時1ms
SET_EN; HAL_Delay(1); // EN = 1,延時1ms
while ((HAL_GPIO_ReadPin(GPIOB,LCD_D7_Pin))&&(later0<10)) //回圈等待忙檢測埠 = 0;或者等10毫秒再退出,避免永遠等待
{
HAL_Delay(1); //延時1ms
later0++;
}
CLE_EN; //EN = 0
//恢復 LCD_D7_Pin管腳為輸出狀態
__HAL_RCC_GPIOB_CLK_ENABLE();
GPIO_InitStruct.Pin = LCD_D7_Pin ;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP ;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
void Gpio_data(unsigned char x) //LCD_D0_Pin- LCD_D7_Pin埠置入8位資料x
{
//第一步,將8個管腳都設定為0
HAL_GPIO_WritePin(GPIOB,LCD_D0_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB,LCD_D1_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB,LCD_D2_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB,LCD_D3_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB,LCD_D4_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB,LCD_D5_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB,LCD_D6_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB,LCD_D7_Pin,GPIO_PIN_RESET);
//第二步,8個管腳都設定為x的各個位
if(x&0X01)HAL_GPIO_WritePin(GPIOB,LCD_D0_Pin,GPIO_PIN_SET);//DB0,設定最低位
if(x&0X02)HAL_GPIO_WritePin(GPIOB,LCD_D1_Pin,GPIO_PIN_SET);//DB1
if(x&0X04)HAL_GPIO_WritePin(GPIOB,LCD_D2_Pin,GPIO_PIN_SET);//DB2
if(x&0X08)HAL_GPIO_WritePin(GPIOB,LCD_D3_Pin,GPIO_PIN_SET);//DB3
if(x&0X10)HAL_GPIO_WritePin(GPIOB,LCD_D4_Pin,GPIO_PIN_SET);//DB4
if(x&0X20)HAL_GPIO_WritePin(GPIOB,LCD_D5_Pin,GPIO_PIN_SET);//DB5
if(x&0X40)HAL_GPIO_WritePin(GPIOB,LCD_D6_Pin,GPIO_PIN_SET);//DB6
if(x&0X80)HAL_GPIO_WritePin(GPIOB,LCD_D7_Pin,GPIO_PIN_SET);//DB7//設定為最高位
}
//向液晶里面寫入指令 時序:RS=L,RW=L,Data0-Data7=指令碼,E=高脈沖
void Lcd_Write_Command(unsigned char x,char Busy)
{
if(Busy) Lcd_Busy();
HAL_Delay(1); //延時1ms
CLE_RS; //RS = 0
HAL_Delay(1); //延時1ms
CLE_RW; //RW = 0
HAL_Delay(1); //延時1ms
Gpio_data(x); //埠置入資料
HAL_Delay(1); //延時1ms
Lcd_En_Toggle(); //發使能脈沖
HAL_Delay(1); //延時1ms
Lcd_Busy(); //測忙
}
//向液晶里面寫入資料 時序:RS=H,RW=L,Data0-Data7=指令碼,E=高脈沖
void Lcd_Write_Data( unsigned char x) //向液晶里面寫入資料
{
Lcd_Busy(); //測忙
HAL_Delay(1); //延時1ms
SET_RS; //RS = 1
HAL_Delay(1); //延時1ms
CLE_RW; //RW = 0
HAL_Delay(1); //延時1ms
Gpio_data(x);
HAL_Delay(1); //延時1ms
Lcd_En_Toggle(); //發使能脈沖
HAL_Delay(1); //延時1ms
Lcd_Busy(); //測忙
}
/* USER CODE END 0 */
/**
- @brief The application entry point.
- @retval int
/
int main(void)
{
/ USER CODE BEGIN 1 */
/* USER CODE END 1 /
/ MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals /
MX_GPIO_Init();
MX_DMA_Init();
MX_ADC1_Init();
/ USER CODE BEGIN 2 */
HAL_ADCEx_Calibration_Start(&hadc1);
HAL_ADC_Start_DMA(&hadc1,ADC_ConvertedValue,1);
HAL_Delay(400); //延時400ms,等液晶穩定
Lcd_Init(); // 液晶初始化函式*,設定液晶的作業模式*
unsigned char IN[]={0x20,0x20,0x20,0x20,0x44,0x69,0x67,0x69,
0x74,0x61,0x6c,0x3a};
unsigned char UN[]={0x20,0x20,0x20,0x20,0x41,0x6e,0x61,0x6c,
0x6f,0x67,0x3a,0x20};
//uint8_t num[10] = {0x30,0x31,0x32,0x33,0x34,0x35,0x36,0x37,0x38,0x39}; //0-9
/* USER CODE END 2 */
/* Infinite loop /
/ USER CODE BEGIN WHILE */
unsigned char i;
unsigned int tmp;
for(i=0;i<12;i++)
{
Lcd_Write_Command(0x80+i,1) ; //定位
Lcd_Write_Data((IN[0+i])); //寫顯示資料
HAL_Delay(1); //延時10ms
}
for(i=0;i<11;i++)
{
Lcd_Write_Command(0xc0+i,1) ; //定位
Lcd_Write_Data(UN[0+i]); //寫顯示資料
HAL_Delay(1); //延時10ms
}
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
Lcd_Write_Command(0x80+12,1);//Lcd_Write_Command(0x92,1);
Lcd_Write_Data(ADC_ConvertedValue[0]/1000+0x30);
Lcd_Write_Command(0x80+13,1);
Lcd_Write_Data((ADC_ConvertedValue[0]%1000)/100+0x30);
Lcd_Write_Command(0x80+14,1);
Lcd_Write_Data((ADC_ConvertedValue[0]%100)/10+0x30);
Lcd_Write_Command(0x80+15,1);
Lcd_Write_Data(ADC_ConvertedValue[0]%10+0x30);
tmp=(unsigned int)(ADC_ConvertedValue[0]3.31000/4095);
Lcd_Write_Command(0xc0+11,1);
Lcd_Write_Data(tmp/1000+0x30);
Lcd_Write_Command(0xc0+13,1);
Lcd_Write_Data((tmp%1000)/100+0x30);
Lcd_Write_Command(0xc0+12,1);
Lcd_Write_Data(0x2e);
Lcd_Write_Command(0xc0+14,1);
Lcd_Write_Data((tmp%100)/10+0x30);
Lcd_Write_Command(0xc0+15,1);
Lcd_Write_Data(tmp%10+0x30);
}
/* USER CODE END 3 */
}
/**
- @brief System Clock Configuration
- @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
RCC_PeriphCLKInitTypeDef PeriphClkInit = {0};
/** Initializes the CPU, AHB and APB busses clocks
/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL6;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/* Initializes the CPU, AHB and APB busses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV2;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_1) != HAL_OK)
{
Error_Handler();
}
PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_ADC;
PeriphClkInit.AdcClockSelection = RCC_ADCPCLK2_DIV2;
if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit) != HAL_OK)
{
Error_Handler();
}
}
/**
- @brief ADC1 Initialization Function
- @param None
- @retval None
*/
static void MX_ADC1_Init(void)
{
/* USER CODE BEGIN ADC1_Init 0 */
/* USER CODE END ADC1_Init 0 */
ADC_ChannelConfTypeDef sConfig = {0};
/* USER CODE BEGIN ADC1_Init 1 */
/* USER CODE END ADC1_Init 1 /
/* Common config
/
hadc1.Instance = ADC1;
hadc1.Init.ScanConvMode = ADC_SCAN_DISABLE;
hadc1.Init.ContinuousConvMode = ENABLE;
hadc1.Init.DiscontinuousConvMode = DISABLE;
hadc1.Init.ExternalTrigConv = ADC_SOFTWARE_START;
hadc1.Init.DataAlign = ADC_DATAALIGN_RIGHT;
hadc1.Init.NbrOfConversion = 1;
if (HAL_ADC_Init(&hadc1) != HAL_OK)
{
Error_Handler();
}
/* Configure Regular Channel
/
sConfig.Channel = ADC_CHANNEL_1;
sConfig.Rank = ADC_REGULAR_RANK_1;
sConfig.SamplingTime = ADC_SAMPLETIME_1CYCLE_5;
if (HAL_ADC_ConfigChannel(&hadc1, &sConfig) != HAL_OK)
{
Error_Handler();
}
/ USER CODE BEGIN ADC1_Init 2 */
/* USER CODE END ADC1_Init 2 */
}
/**
- Enable DMA controller clock
*/
static void MX_DMA_Init(void)
{
/* DMA controller clock enable */
__HAL_RCC_DMA1_CLK_ENABLE();
/* DMA interrupt init /
/ DMA1_Channel1_IRQn interrupt configuration */
HAL_NVIC_SetPriority(DMA1_Channel1_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(DMA1_Channel1_IRQn);
}
/**
- @brief GPIO Initialization Function
- @param None
- @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_0, GPIO_PIN_RESET);
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOB, LCD1602_E_Pin|LCD1602_RS_Pin|LCD1602_RW_Pin|LCD_D2_Pin
|LCD_D3_Pin|LCD_D4_Pin|LCD_D5_Pin|LCD_D6_Pin
|LCD_D7_Pin|LCD_D0_Pin|LCD_D1_Pin, GPIO_PIN_RESET);
/*Configure GPIO pin : PA0 */
GPIO_InitStruct.Pin = GPIO_PIN_0;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/*Configure GPIO pins : LCD1602_E_Pin LCD1602_RS_Pin LCD1602_RW_Pin LCD_D2_Pin
LCD_D3_Pin LCD_D4_Pin LCD_D5_Pin LCD_D6_Pin
LCD_D7_Pin LCD_D0_Pin LCD_D1_Pin */
GPIO_InitStruct.Pin = LCD1602_E_Pin|LCD1602_RS_Pin|LCD1602_RW_Pin|LCD_D2_Pin
|LCD_D3_Pin|LCD_D4_Pin|LCD_D5_Pin|LCD_D6_Pin
|LCD_D7_Pin|LCD_D0_Pin|LCD_D1_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
- @brief This function is executed in case of error occurrence.
- @retval None
/
void Error_Handler(void)
{
/ USER CODE BEGIN Error_Handler_Debug /
/ User can add his own implementation to report the HAL error return state */
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
- @brief Reports the name of the source file and the source line number
-
where the assert_param error has occurred. - @param file: pointer to the source file name
- @param line: assert_param error line source number
- @retval None
*/
void assert_failed(uint8_t file, uint32_t line)
{
/ USER CODE BEGIN 6 /
/ User can add his own implementation to report the file name and line number,
tex: printf(“Wrong parameters value: file %s on line %d\r\n”, file, line) /
/ USER CODE END 6 /
}
#endif / USE_FULL_ASSERT */
/************************ ? COPYRIGHT STMicroelectronics *END OF FILE/
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/55708.html
標籤:AI