系統:ubuntu 16.04 LTS & ROS kinetic
設備:ur5機械臂 & IntelRealsense D435 深度相機
使用easy_handeye package進行相機的手眼定標,實際操作環境如圖,相機安裝在機械臂末端固定,使用aruco_ros的marker_id = 582的標定板

參考了前輩的作業之后,根據使用的環境修改以及撰寫了自己的.launch檔案,參考文章鏈接如下:
https://blog.csdn.net/weixin_40799950/article/details/82594537
https://blog.csdn.net/zhang970187013/article/details/81098175
實際使用時,依次運行以下命令啟動標定程式
roslaunch ur_modern_driver ur5_bringup.launch limited:=true robot_ip:=169.254.5.89
roslaunch ur5_moveit_config ur5_moveit_planning_execution.launch limited:=true
roslaunch realsense2_camera rs_rgbd.launch
roslaunch easy_handeye ur5_realsense_handeyecalibration.launch
之后順利啟動標定程式,終端沒有報錯,按照正常流程完成標定之后(17個姿勢獲得了15個可用的sample)得到了以矩陣元(transition: x y z rotation:qx qy qz)形式發布的標定結果。但是將標定結果發布到rviz中進行觀察時卻發現相機(camera_link)的位置及坐標系方向與實際情況完全不符。
使用eye_on_base模式標定:
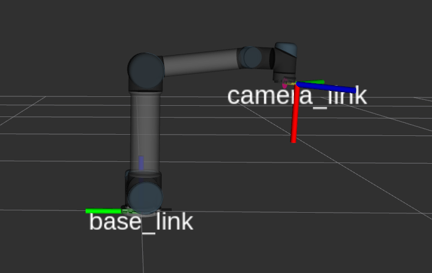
使用eye_on_hand模式標定:

從原理上講根據相機安裝的位置應該使用eye_on_hand模式進行標定,但標定結果camera_link的位置和指向都是錯誤的,而eye_on_base模式的標定結果看起來反而更像是正確的結果(雖然坐標系的指向也是錯誤的)
向各位大佬求助一下,實在是搞不明白到底哪一步出了問題
uj5u.com熱心網友回復:
這個主要看下,具體代碼。一般可能二維碼有問題或者是其他問題。轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/62222.html
標籤:機器視覺
上一篇:AFL模糊測驗工具的postprocessor有什么作用?
下一篇:請大佬幫忙看一下