目錄
- 1. 概述
- 2. 實作
- 2.1. 準備
- 2.2. 核心
- 2.2.1. 均值坐標(Mean-Value Coordinates)
- 2.2.2. ROI邊界柵格化
- 2.2.3. 核心實作
- 2.2.4. 實作中的問題
- 3. 效果
- 3.1. 使用程序
- 3.2. 效率
- 4. 參考
1. 概述
泊松融合是影像融合處理效果最好的演算法,其來自于2004年Siggraph的經典paper:《Poisson Image Editing》,以這篇文章為發端,很多大神提出了一系列的優化演算法,2009年, Zeev Farbman 在的SIGGRAPH上面提出的基于Mean-Value Coordinates方法的泊松融合加速演算法《Coordinates for Instant Image Cloning》(文獻二),在這篇文章中,泊松方程被轉換成拉普拉斯方程,并且提出了用均值坐標Mean-Value Coordinates來近似求解這個方程,從而達到實時運算的效果,
初步了解了一下原生的泊松融合演算法和均值坐標融合演算法,其原理包含的內涵十分豐富,包含一些諸如列散度、拉普拉斯算子、梯度場、泊松方程等等數學知識,要完全弄明白確實需要一定的基礎,這里就重點關注一下根據《Coordinates for Instant Image Cloning》(文獻二)實作影像融合的程序,有機會的話再詳細推導一下其原理,
2. 實作
2.1. 準備
在OpenCV中,已經收錄了泊松融合演算法,也就是函式seamlessClone():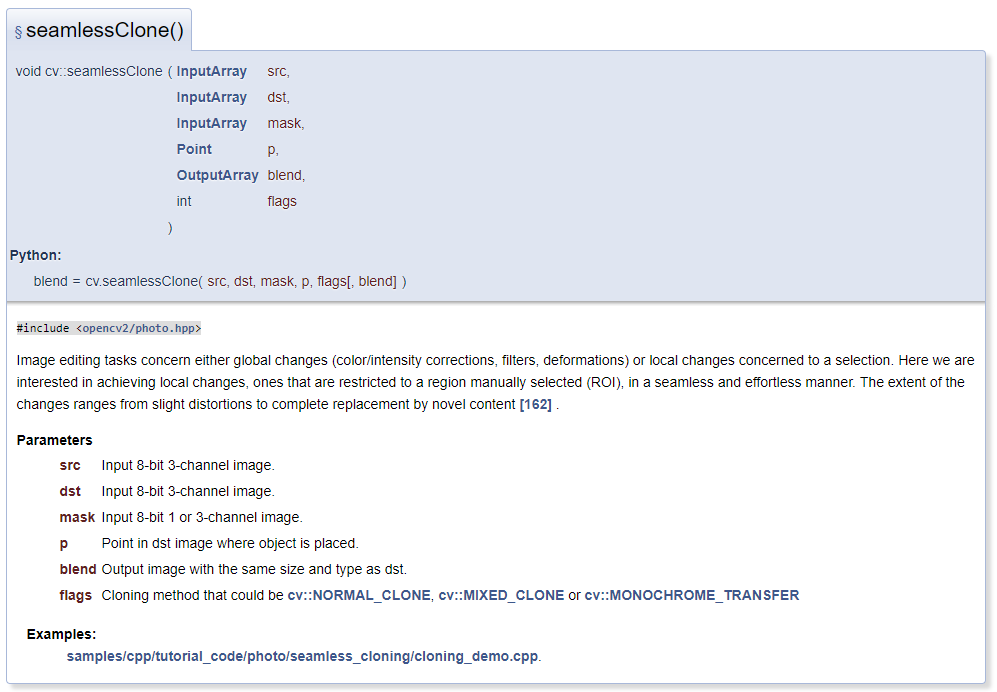
這個演算法要求輸入一個源影像,一個目標影像,源影像希望融合到目標影像的位置,以及一個mask影像,這個mask影像也就是一張二值化影像,用來標識影像的ROI(region of interest感興趣區域),均值坐標融合演算法的輸入引數也是一樣的,不過mask影像很難以處理,OpenCV自帶的GUI難以滿足需求,所以我這里通過QT來做GUI,通過OpenCV將影像顯示到QT表單上,然后再QT表單的影像區域內繪制多邊形,多邊形內部即為ROI,可以參考我的這兩篇文章:
《使用QT顯示OpenCV讀取的圖片》
《使用QT繪制一個多邊形》
2.2. 核心
2.2.1. 均值坐標(Mean-Value Coordinates)
在論文中提出了一個很重要的概念也就是均值坐標(Mean-Value Coordinates),對于如下多邊形內部的點: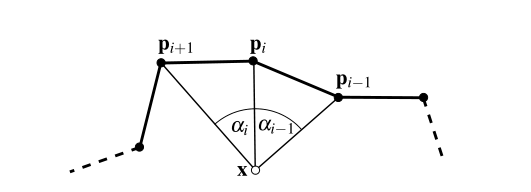
都有一系列與多邊形邊界相關的坐標值: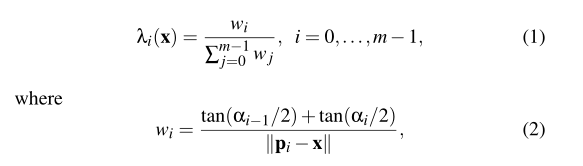
也就是說,只要確定了ROI,也就確定了ROI區域內每個點的均值坐標(Mean-Value Coordinates),每個點會有m個值(m為ROI邊界多邊形的頂點),
2.2.2. ROI邊界柵格化
論文中是以ROI邊界多邊形為例的,實際用到影像處理中是不會只用幾個多邊形的節點來計算的,而應該是ROI邊界上連續的點,實際上不用想也知道,影像融合最關鍵的部分就是ROI邊界部分的像素值,必須要用到ROI邊界上所有的像素值來計算,
也就是說這里還需要一個作業,就是將ROI邊界多邊形柵格化,取得其上連續的像素位置,得到準確的柵格化多邊形邊界,這里可以參看我的這篇文章《矢量線的一種柵格化演算法》,按照順序逐條將多邊形的邊柵格化,即可以得到ROI的柵格化多邊形邊界,
2.2.3. 核心實作
論文給出的演算法偽代碼如下: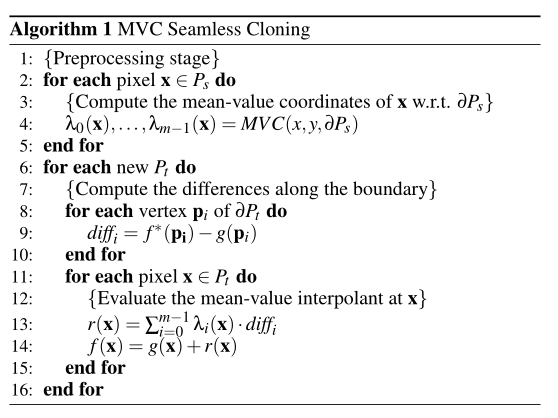
這段演算法描述并不復雜,轉換成自然語言如下:
- 假設ROI區域內有n個點,其邊界由m個點組成,
- 那么可以求每個點的MVC(均值坐標),每個點有m個坐標值,一共有n個點,MVC就是就是一個n*m的矩陣,
- 求ROI區域邊界的像素差diff,顯然其是一個m*1的矩陣,
- 那么新影像ROI區域的插值為:r = MVC * diff,矩陣乘法后r為n*1矩陣,
- 將插值r與原影像g矩陣相加:f = g + r,替換目標影像相應位置的值,
核心部分具體的實作代碼如下:
QTime startTime = QTime::currentTime();
//Step1:找到邊界上所有的像素點
vector<Vector2d> ROIBoundPointList;
CalBoundPoint(ROIBoundPointList);
//Step2:計算范圍內每個點的 mean-value coordinates
size_t srcImgBufNum = static_cast<size_t>(srcImg.cols) * static_cast<size_t>(srcImg.rows);
vector<vector<double>> MVC(srcImgBufNum);
for(size_t i = 0; i < srcImgBufNum; i++)
{
MVC[i].resize(ROIBoundPointList.size()-1, 0);
}
vector<bool> clipMap(srcImgBufNum, true); //標識范圍內的點
cout<<"開始計算 mean-value coordinates..." << endl;
#pragma omp parallel for //開啟OpenMP并行加速
for (int ri = 0; ri < srcImg.rows; ++ri)
{
for (int ci = 0; ci < srcImg.cols; ++ci)
{
//點是否在多邊形內
size_t m = static_cast<size_t>(srcImg.cols) * ri + ci;
if(!Point_In_Polygon_2D(ci, ri, ROIBoundPointList))
{
clipMap[m] = false;
continue;
}
//逐點計算MVC
Vector2d P(ci, ri);
vector<double> alphaAngle(ROIBoundPointList.size());
for(size_t pi = 1; pi < ROIBoundPointList.size(); pi++)
{
alphaAngle[pi] = threePointCalAngle(ROIBoundPointList[pi-1], P, ROIBoundPointList[pi]);
}
alphaAngle[0] = alphaAngle[ROIBoundPointList.size()-1];
for(size_t pi = 1; pi < ROIBoundPointList.size(); pi++)
{
double w_a = tan(alphaAngle[pi-1]/2) + tan(alphaAngle[pi]/2);
double w_b = (ROIBoundPointList[pi-1] - P).Mod();
MVC[m][pi-1] = w_a / w_b;
if(_isnan(MVC[m][pi-1])==1)
{
MVC[m][pi-1] = 0;
}
}
double sum = 0;
for(size_t pi = 0; pi < MVC[m].size(); pi++)
{
sum = sum + MVC[m][pi];
}
for(size_t pi = 0; pi < MVC[m].size(); pi++)
{
MVC[m][pi] = MVC[m][pi] / sum;
}
}
}
cout<<"計算完成!" << endl;
//Step3:計算邊界的像素插值
vector<int> diff;
for(size_t i = 0; i < ROIBoundPointList.size()-1; i++)
{
size_t l = (size_t) srcImg.cols * ROIBoundPointList[i].y + ROIBoundPointList[i].x;
for(int bi = 0; bi < winBandNum; bi++)
{
size_t m = (size_t) dstImg.cols * winBandNum * (ROIBoundPointList[i].y + posY)+ winBandNum * (ROIBoundPointList[i].x + posX) + bi;
size_t n = (size_t) srcImg.cols * winBandNum * ROIBoundPointList[i].y + winBandNum * ROIBoundPointList[i].x + bi;
int d = (int)(dstImg.data[m]) - (int)(srcImg.data[n]);
diff.push_back(d);
}
clipMap[l] = false; //在多邊形邊上的點沒法計算MVC
}
//Step4:插值計算
cout<<"開始插值計算..." << endl;
//Mat rMat(srcImg.rows, srcImg.cols, CV_64FC3);
#pragma omp parallel for
for (int ri = 0; ri < srcImg.rows; ++ri)
{
for (int ci = 0; ci < srcImg.cols; ++ci)
{
size_t l = (size_t) srcImg.cols * ri + ci;
if(!clipMap[l])
{
continue;
}
vector<double> r(winBandNum, 0);
for(size_t pi = 0; pi < MVC[l].size(); pi++)
{
for(int bi = 0; bi < winBandNum; bi++)
{
r[bi] = r[bi] + MVC[l][pi] * diff[pi * winBandNum + bi];
}
}
for(int bi = 0; bi < winBandNum; bi++)
{
size_t n = (size_t) srcImg.cols * winBandNum * ri + winBandNum * ci + bi;
size_t m = (size_t) dstImg.cols * winBandNum * (ri + posY)+ winBandNum * (ci + posX) + bi;
dstImg.data[m] = min(max(srcImg.data[n] + r[bi], 0.0), 255.0);
}
}
}
cout<<"插值完成!" << endl;
QTime stopTime = QTime::currentTime();
int elapsed = startTime.msecsTo(stopTime);
cout<<"總結完成用時"<<elapsed<<"毫秒";
2.2.4. 實作中的問題
- ROI邊界上的點無法計算MVC值,需要予以剔除,否則ROI邊界上會出現一圈白色的點,
- 用到了OpenMP加速,可以大幅提高性能,如有必要的話,可以通過顯卡加速,
3. 效果
3.1. 使用程序
程式源代碼可參見文章最末的鏈接,是一個OpenCV結合QT的GUI的程式,編譯運行后,點擊"打開"按鈕,界面會顯示源影像:
點擊"繪制"按鈕,在源影像區域內繪制一個多邊形,確定一個ROI: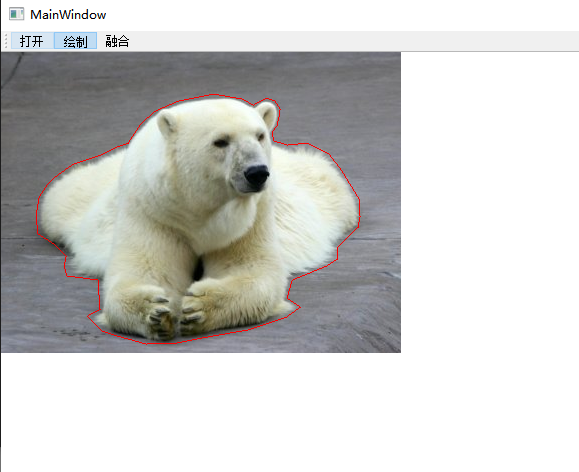
準備一張想要融合的目標影像:
點擊"融合"按鈕,會加載目標影像,并會根據設定的位置,將源影像的ROI融合到目標影像中: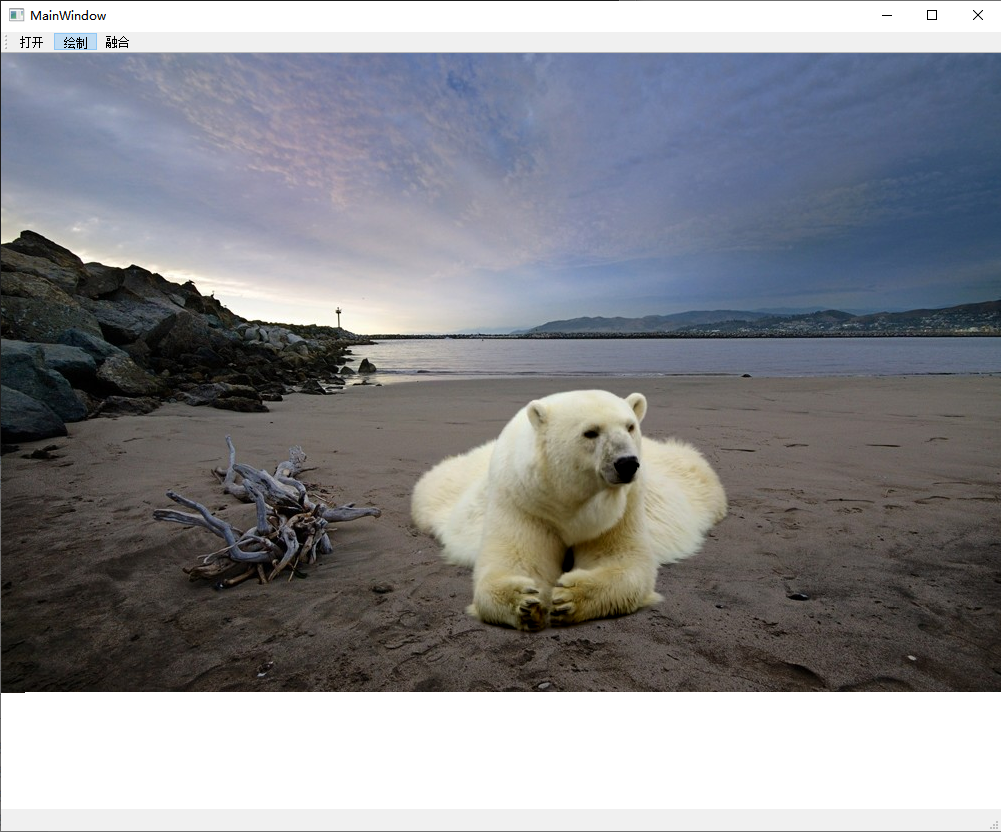
3.2. 效率
在Debug模式,不使用OpenMP加速的情況下,這個演算法的效率大約需要50秒左右的時間,
在Debug模式,使用OpenMP加速,演算法的效率可以優化到10秒,也就是不使用OpenMP加速時的5倍左右,而我使用的機器CPU是i7-8750H標壓6核CPU,考慮到一些IO操作造成的性能損耗,這個優化效率是正常的,
最后在使用Release模式,使用OpenMP加速之后,演算法的效率可以優化到1秒左右,這說明編譯器優化對程式性能也是有很大影響的,尤其是對并行程式而言,
這個實作只是這個演算法的初始實作,效率就已經達到了1秒左右,看來論文說的可以達到實時融合確實不是虛言,有機會再嘗試一下論文中提到的一些性能優化實作,
4. 參考
[1] 泊松融合及其優化演算法
[2] Coordinates for Instant Image Cloning
[3] 影像處理(十二)影像融合(1)Seamless cloning泊松克隆-Siggraph 2004
[4] 多尺度并行坐標插值實時影像克隆演算法
實作代碼
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/77833.html
標籤:其他