作者|Marcelo Rovai
編譯|VK
來源|Towards Data Science
介紹
正如Zhe Cao在其2017年的論文中所述,實時多人二維姿勢估計對于機器理解影像和視頻中的人至關重要,
然而,什么是姿勢估計
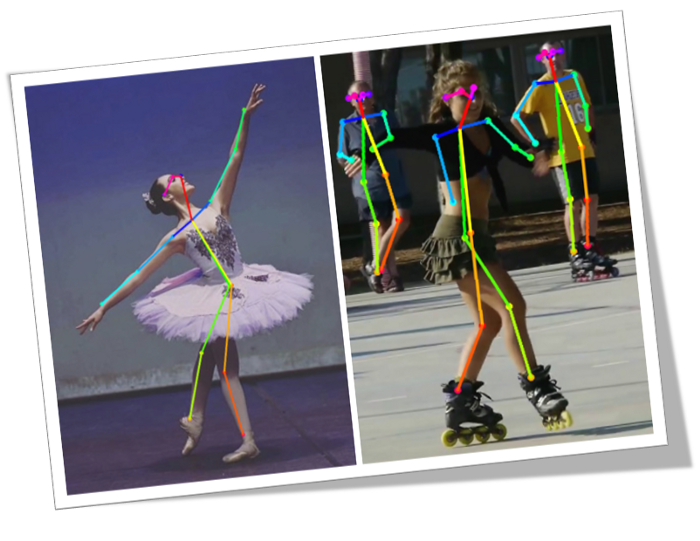
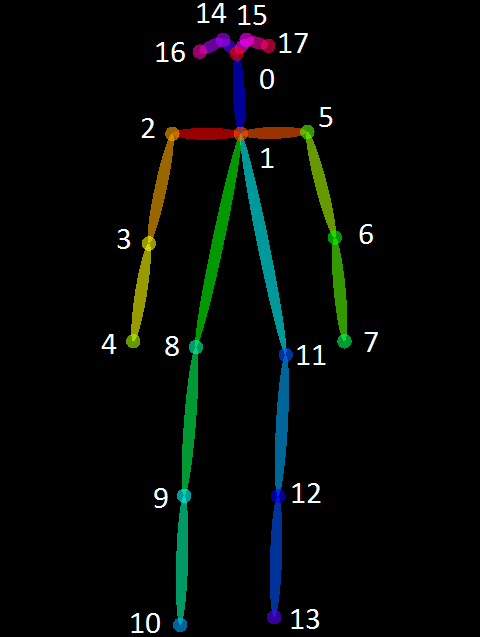
顧名思義,它是一種用來估計一個人身體位置的技術,比如站著、坐著或躺下,獲得這一估計值的一種方法是找到18個“身體關節”或人工智能領域中命名的“關鍵點(Key Points)”,下面的影像顯示了我們的目標,即在影像中找到這些點:
關鍵點從0點(上頸部)向下延伸到身體關節,然后回到頭部,最后是第17點(右耳),
使用人工智能方法出現的第一個有意義的作業是DeepPose,2014年由谷歌的Toshev和Zegedy撰寫的論文,提出了一種基于深度神經網路(DNNs)的人體姿勢估計方法,該方法將人體姿勢估計歸結為一個基于DNN的人體關節回歸問題,
該模型由一個AlexNet后端(7層)和一個額外的目標層,輸出2k個關節坐標,這種方法的一個重要問題是,首先,模型應用程式必須檢測到一個人(經典的物件檢測),因此,在影像上發現的每個人體必須分開處理,這大大增加了處理影像的時間,
這種方法被稱為“自上而下”,因為首先要找到身體,然后從中找到與其相關聯的關節,
姿勢估計的挑戰
姿勢估計有幾個問題,如:
-
每個影像可能包含未知數量的人,這些人可以出現在任何位置或比例,
-
人與人之間的相互作用會導致復雜的空間干擾,這是由于接觸或肢體關節連接,使得關節的關聯變得困難,
-
運行時的復雜性往往隨著影像中的人數而增加,這使得實時性能成為一個挑戰,
為了解決這些問題,一種更令人興奮的方法是OpenPose,這是2016年由卡內基梅隆大學機器人研究所的ZheCao和他的同事們引入的,
OpenPose
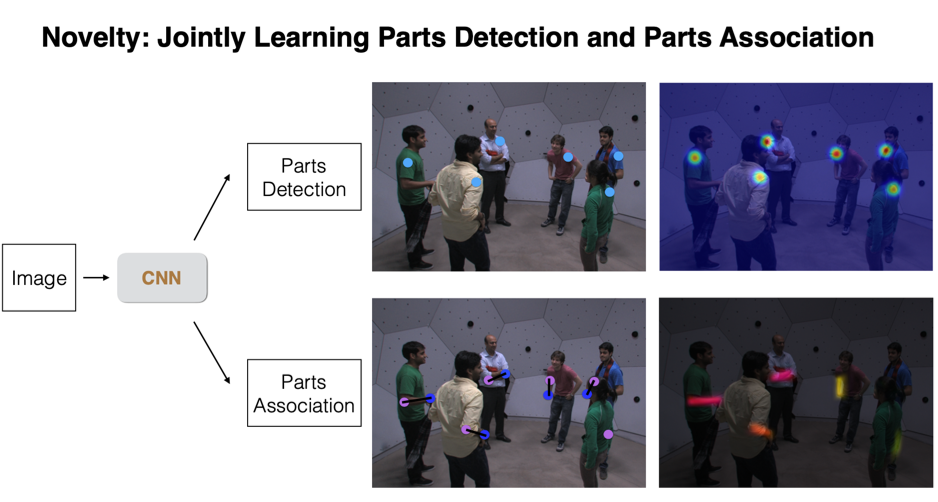
OpenPose提出的方法使用一個非引數表示,稱為部分親和力場(PAFs)來“連接”影像上的每個身體關節,將它們與個人聯系起來,
換句話說,OpenPose與DeepPose相反,首先在影像上找到所有關節,然后“向上”搜索最有可能包含該關節的身體,而不使用檢測人的檢測器(“自下而上”方法),OpenPose可以找到影像上的關鍵點,而不管影像上有多少人,下面的圖片是從ILSVRC和COCO研討會2016上的OpenPose演示中檢索到的,它讓我們了解了這個程序,
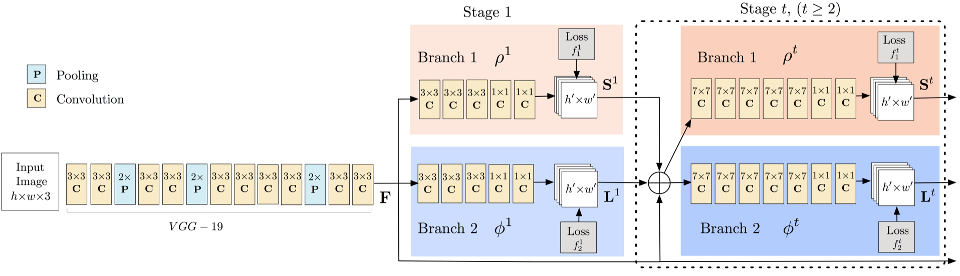
下圖顯示了用于訓練的兩個多階段CNN模型的結構,首先,前饋網路同時預測一組人體部位位置的二維置信度映射(關鍵點標注來自(dataset/COCO/annotations/)和一組二維的部分親和力場(L),
在每一個階段之后,兩個分支的預測以及影像特征被連接到下一個階段,最后,利用貪婪的推理對置信圖和相似域進行決議,輸出影像中所有人的二維關鍵點,
在專案執行程序中,我們將回到其中一些概念進行澄清,但是,強烈建議你遵循2016年的OpenPose ILSVRC和COCO研討會演示(http://image-net.org/challenges/talks/2016/Multi-person pose estimation-CMU.pdf)和CVPR 2017的視頻錄制(https://www.youtube.com/watch?v=OgQLDEAjAZ8&list=PLvsYSxrlO0Cl4J_fgMhj2ElVmGR5UWKpB),以便更好地理解,
TensorFlow 2 OpenPose (tf-pose-estimation)
最初的OpenPose是使用基于模型的VGG預訓練網路和Caffe框架開發的,但是,我們將遵循Ildoo Kim 的TensorFlow實作,詳細介紹了他的tf-pose-estimation,
Github鏈接:https://github.com/ildoonet/tf-pose-estimation
什么是tf-pose-estimation?
tf-pose-estimation是一種“Openpose”演算法,它是利用Tensorflow實作的,它還提供了幾個變體,這些變體對網路結構進行了一些更改,以便在CPU或低功耗嵌入式設備上進行實時處理,
tf-pose-estimation的GitHub頁面展示了幾種不同模型的實驗,如:
- cmu:原論文中描述的基于模型的VGG預訓練網路的權值是Caffe格式,將其轉換并用于TensorFlow,
- dsconv:除了mobilenet的深度可分離卷積之外,與cmu版本的架構相同,
- mobilenet:基于mobilenet V1論文,使用12個卷積層作為特征提取層,
- mobilenet v2:與mobilenet相似,但使用了它的改進版本,
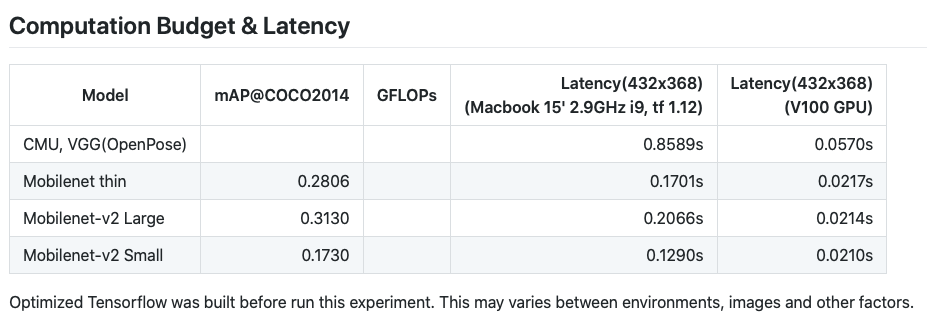
本文的研究是在mobilenet V1(“mobilenet_thin”)上進行的,它在計算預算和延遲方面具有中等性能:
第1部分-安裝 tf-pose-estimation
我們參考了Gunjan Seth的文章Pose Estimation with TensorFlow 2.0(https://medium.com/@gsethi2409/pose-estimation-with-tensorflow-2-0-a51162c095ba),
- 轉到終端并創建一個作業目錄(例如,“Pose_Estimation”),并移動到那里:
mkdir Pose_Estimation
cd Pose_Estimation
- 創建虛擬環境(例如,Tf2_Py37)
conda create --name Tf2_Py37 python=3.7.6 -y
conda activate Tf2_Py37
- 安裝TF2
pip install --upgrade pip
pip install tensorflow
- 安裝開發期間要使用的基本軟體包:
conda install -c anaconda numpy
conda install -c conda-forge matplotlib
conda install -c conda-forge opencv
- 下載tf-pose-estimation:
git clone https://github.com/gsethi2409/tf-pose-estimation.git
- 轉到tf-pose-estimation檔案夾并安裝requirements
cd tf-pose-estimation/
pip install -r requirements.txt
在下一步,安裝SWIG,一個介面編譯器,用C語言和C++撰寫的程式連接到Python等腳本語言,它通過在C/C++頭檔案中找到的宣告來作業,并使用它們生成腳本語言需要訪問底層C/C++代碼的包裝代碼,
conda install swig
- 使用SWIG,構建C++庫進行后處理,
cd tf_pose/pafprocess
swig -python -c++ pafprocess.i && python3 setup.py build_ext --inplace
- 現在,安裝tf-slim庫,一個用于定義、訓練和評估TensorFlow中復雜模型的輕量級庫,
pip install git+https://github.com/adrianc-a/tf-slim.git@remove_contrib
就這樣!現在,有必要進行一次快速測驗,回傳tf-pose-estimation主目錄,
如果你按照順序,你必須在 tf_pose/pafprocess內,否則,請使用適當的命令更改目錄,
cd ../..
在tf-pose-estimation目錄中有一個python腳本 run.py,讓我們運行它,引數如下:
-
model=mobilenet_thin
-
resize=432x368(預處理時影像的大小)
-
image=./images/ski.jpg(影像目錄內的示例影像)
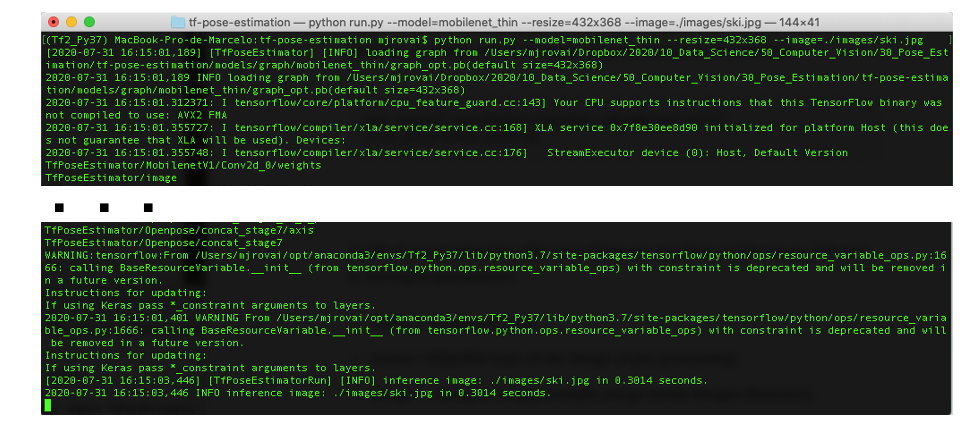
python run.py --model=mobilenet_thin --resize=432x368 --image=./images/ski.jpg
請注意,在幾秒鐘內,不會發生任何事情,但大約一分鐘后,終端應顯示與下圖類似的內容:
但是,更重要的是,影像將出現在獨立的OpenCV視窗上:
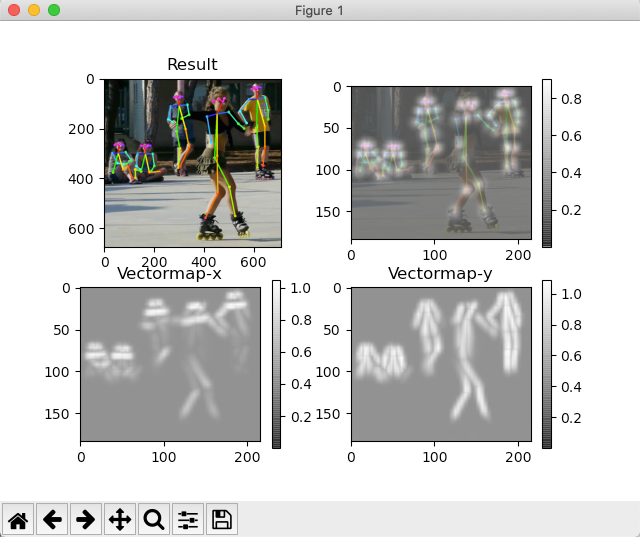
太好了!這些圖片證明了一切都是正確安裝和運作良好的!我們將在下一節中詳細介紹,
然而,為了快速解釋這四幅影像的含義,左上角(“Result”)是繪制有原始影像的姿勢檢測骨架(在本例中,ski.jpg)作為背景,右上角的影像是一個“熱圖”,其中顯示了“檢測到的組件”(S),兩個底部影像都顯示了組件的關聯(L),“Result”是把S和L連接起來,
下一個測驗是現場視頻:
如果計算機只安裝了一個攝像頭,請使用:camera=0
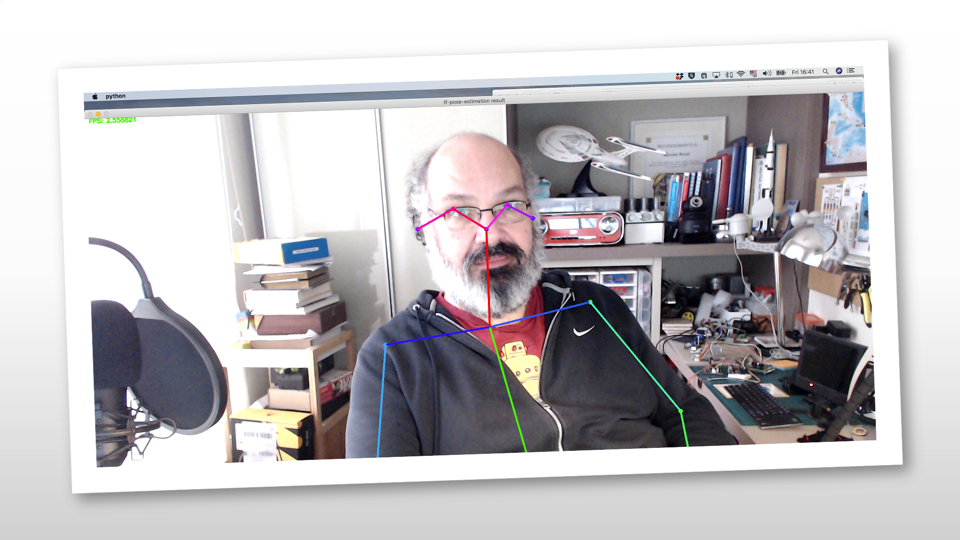
python run_webcam.py --model=mobilenet_thin --resize=432x368 --camera=1
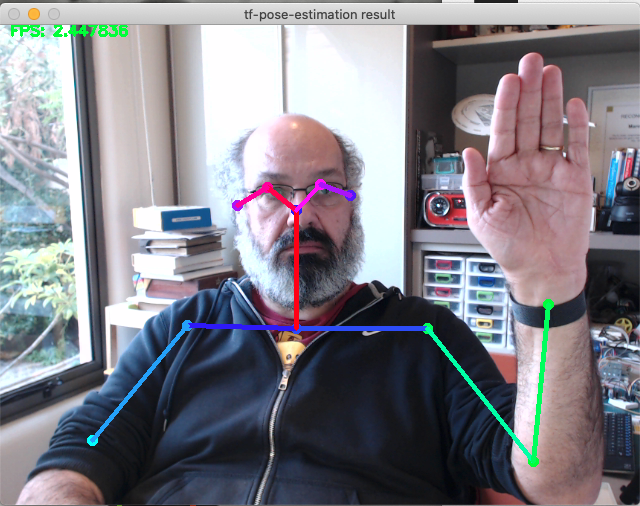
如果一切順利,就會出現一個視窗,里面有一段真實的視頻,就像下面的截圖:
第2部分-深入研究影像中的姿勢估計
在本節中,我們將更深入地介紹我們的TensorFlow姿勢估計實作,建議你按照這篇文章,試著復制Jupyter Notebook:10_Pose_Estimation_Images,可以從GitHub專案下載:https://github.com/Mjrovai/TF2_Pose_Estimation/blob/master/10_Pose_Estimation_Images.ipynb
作為參考,這個專案是在MacPro(2.9Hhz Quad-Core i7 16GB 2133Mhz RAM)上開發的,
匯入庫
import sys
import time
import logging
import numpy as np
import matplotlib.pyplot as plt
import cv2
from tf_pose import common
from tf_pose.estimator import TfPoseEstimator
from tf_pose.networks import get_graph_path, model_wh
模型定義和TfPose Estimator創建
可以使用位于model/graph子目錄中的模型,如mobilenet_v2_large或cmu(VGG pretrained model),
對于cmu,*.pb檔案在安裝期間沒有下載,因為它們很大,要使用它,請運行位于/cmu子目錄中的bash腳本download.sh,
這個專案使用mobilenet_thin(MobilenetV1),考慮到所有使用的影像都應該被調整為432x368,
引數:
model='mobilenet_thin'
resize='432x368'
w, h = model_wh(resize)
創建估計器:
e = TfPoseEstimator(get_graph_path(model), target_size=(w, h))
為了便于分析,讓我們加載一個簡單的人體影像,OpenCV用于讀取影像,影像存盤為RGB,但在內部,OpenCV與BGR一起作業,使用OpenCV顯示影像沒有問題,因為在特定視窗上顯示影像之前,它將從BGR轉換為RGB(如所示ski.jpg上一節),
一旦影像被列印到Jupyter單元上,Matplotlib將被用來代替OpenCV,因此,在顯示之前,需要對影像進行轉換,如下所示:
image_path = ‘./images/human.png’
image = cv2.imread(image_path)
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
plt.imshow(image)
plt.grid();
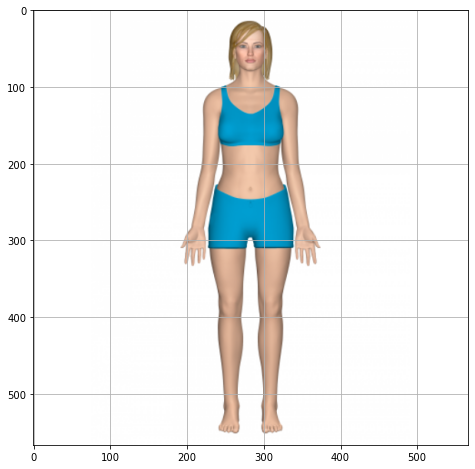
請注意,此影像的形狀為567x567,OpenCV讀取影像時,自動將其轉換為陣列,其中每個值從0到255,其中0表示“白色”,255表示“黑色”,
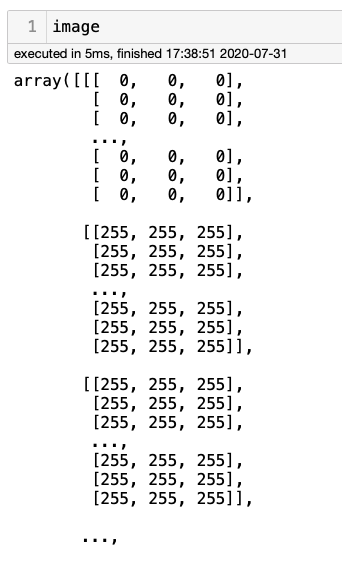
一旦影像是一個陣列,就很容易使用shape驗證其大小:
image.shape
結果將是(567567,3),其中形狀是(寬度、高度、顏色通道),
盡管可以使用OpenCV讀取影像,但我們將使用tf_pose.common庫中的函式read_imgfile(image_path) 以防止顏色通道出現任何問題,
image = common.read_imgfile(image_path, None, None)
一旦我們將影像作為一個陣列,我們就可以將方法推理應用到估計器(estimator, e)中,將影像陣列作為輸入
humans = e.inference(image, resize_to_default=(w > 0 and h > 0), upsample_size=4.0)
運行上述命令后,讓我們檢查陣列e.heatmap,該陣列的形狀為(184,216,19),其中184為h/2,216為w/2,19與特定像素屬于18個關節(0到17)+1(18:none)中的一個的概率有關,例如,檢查左上角像素時,應出現“none”:
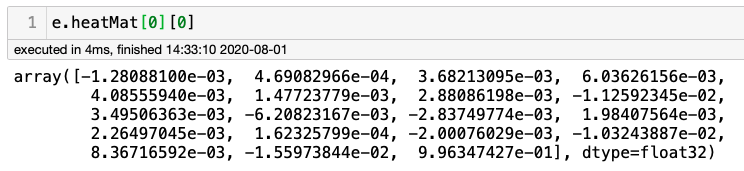
可以驗證此陣列的最后一個值
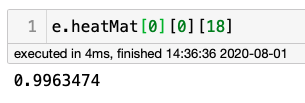
這是最大的值;可以理解的是,在99.6%的概率下,這個像素不屬于18個關節中的任何一個,
讓我們試著找出頸部的底部(肩膀之間的中點),它位于原始圖片的中間寬度(0.5*w=108)和高度的20%左右,從上/下(0.2*h=37)開始,所以,讓我們檢查一下這個特定的像素:
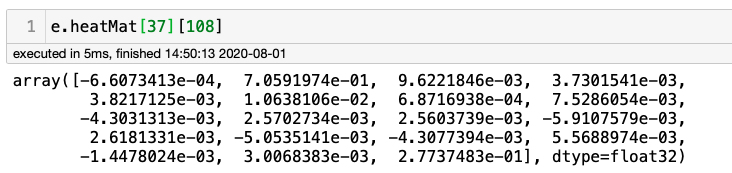
很容易意識到位置1的最大值為0.7059…(或通過計算e.heatMat[37][108].max()),這意味著特定像素有70%的概率成為“頸部”,下圖顯示了所有18個COCO關鍵點(或“身體關節”),顯示“1”對應于“頸部底部”,
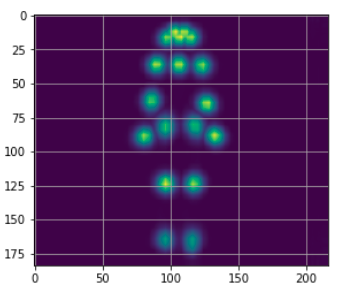
可以為每個像素繪制,一種代表其最大值的顏色,這樣一來,一張顯示關鍵點的熱圖就會神奇地出現:
max_prob = np.amax(e.heatMat[:, :, :-1], axis=2)
plt.imshow(max_prob)
plt.grid();
我們現在在調整后的原始影像上繪制關鍵點:
plt.figure(figsize=(15,8))
bgimg = cv2.cvtColor(image.astype(np.uint8), cv2.COLOR_BGR2RGB)
bgimg = cv2.resize(bgimg, (e.heatMat.shape[1], e.heatMat.shape[0]), interpolation=cv2.INTER_AREA)
plt.imshow(bgimg, alpha=0.5)
plt.imshow(max_prob, alpha=0.5)
plt.colorbar()
plt.grid();
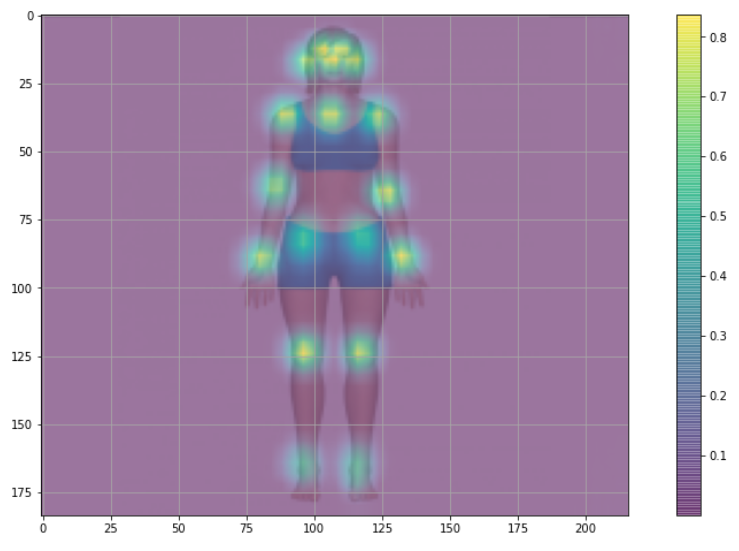
因此,可以在影像上看到關鍵點,因為color bar上顯示的值意味著:如果黃色更深就有更高的概率,
為了得到L,即關鍵點(或“關節”)之間最可能的連接(或“骨骼”),我們可以使用e.pafMat的結果陣列,其形狀為(184,216,38),其中38(2x19)與該像素與18個特定關節+none中的一個作為水平(x)或垂直(y)連接的一部分的概率有關,
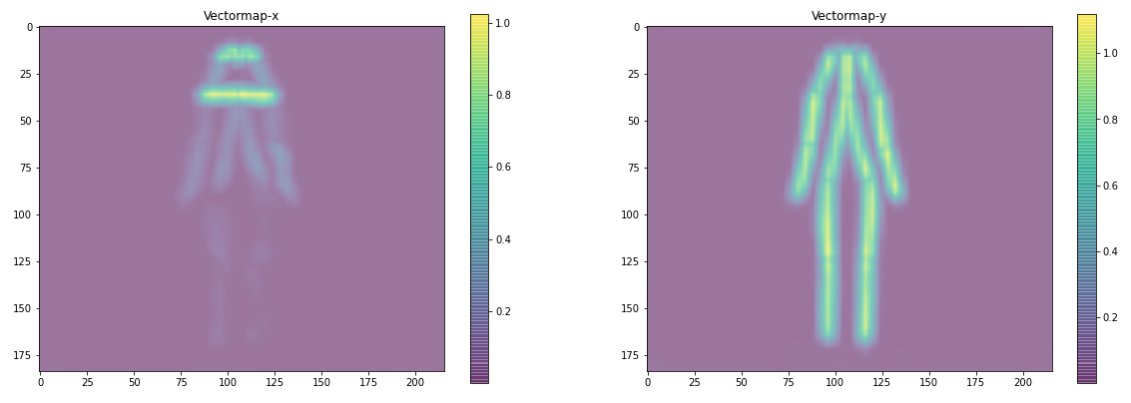
繪制上述圖表的函式在Notebook中,
使用draw_human方法繪制骨骼
使用e.inference()方法的結果傳遞給串列human,可以使用draw_human方法繪制骨架:
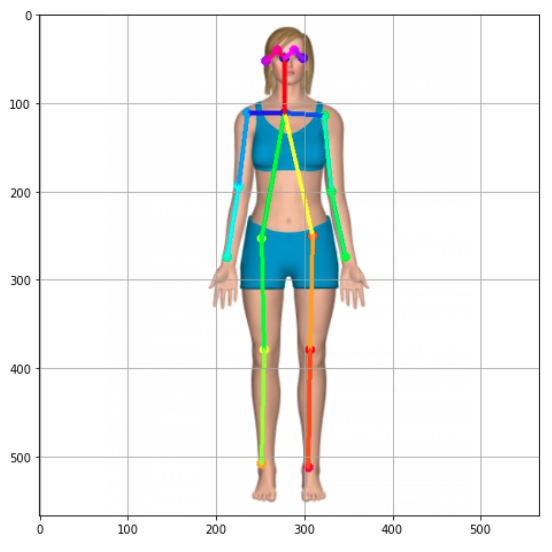
image = TfPoseEstimator.draw_humans(image, humans, imgcopy=False)
結果如下圖:
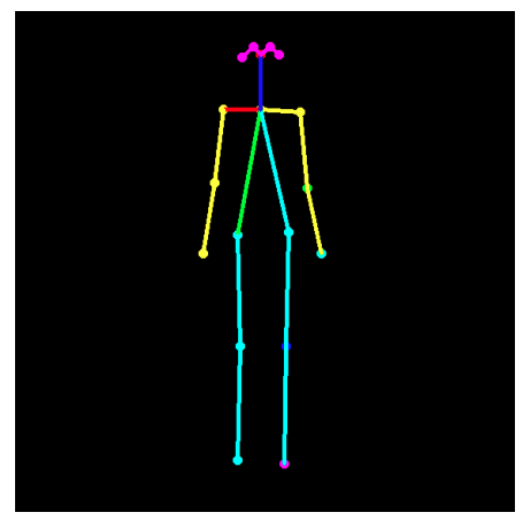
如果需要的話,可以只繪制骨架,如下所示(讓我們重新運行所有代碼進行回顧):
image = common.read_imgfile(image_path, None, None)
humans = e.inference(image, resize_to_default=(w > 0 and h > 0), upsample_size=4.0)
black_background = np.zeros(image.shape)
skeleton = TfPoseEstimator.draw_humans(black_background, humans, imgcopy=False)
plt.figure(figsize=(15,8))
plt.imshow(skeleton);
plt.grid();
plt.axis(‘off’);
獲取關鍵點(關節)坐標
姿勢估計可用于機器人、游戲或醫學等一系列應用,為此,從影像中獲取物理關鍵點坐標以供其他應用程式使用可能很有趣,
查看e.inference()生成的human串列,可以驗證它是一個包含單個元素、字串的串列,在這個字串中,每個關鍵點都以其相對坐標和相關概率出現,例如,對于目前使用的人像,我們有:

例如:
BodyPart:0-(0.49, 0.09) score=0.79
BodyPart:1-(0.49, 0.20) score=0.75
...
BodyPart:17-(0.53, 0.09) score=0.73
我們可以從該串列中提取一個陣列(大小為18),其中包含與原始影像形狀相關的實際坐標:
keypoints = str(str(str(humans[0]).split('BodyPart:')[1:]).split('-')).split(' score=')
keypts_array = np.array(keypoints_list)
keypts_array = keypts_array*(image.shape[1],image.shape[0])
keypts_array = keypts_array.astype(int)
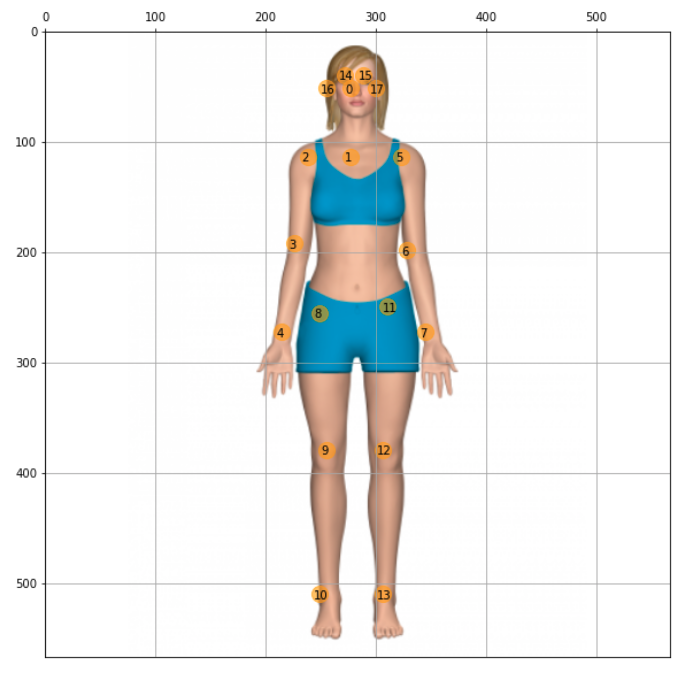
讓我們在原始影像上繪制這個陣列(陣列的索引是 key point),結果如下:
plt.figure(figsize=(10,10))
plt.axis([0, image.shape[1], 0, image.shape[0]])
plt.scatter(*zip(*keypts_array), s=200, color='orange', alpha=0.6)
img = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
plt.imshow(img)
ax=plt.gca()
ax.set_ylim(ax.get_ylim()[::-1])
ax.xaxis.tick_top()
plt.grid();
for i, txt in enumerate(keypts_array):
ax.annotate(i, (keypts_array[i][0]-5, keypts_array[i][1]+5)
創建函式以快速復制對通用影像的研究:
Notebook顯示了迄今為止開發的所有代碼,“encapsulated”為函式,例如,讓我們看看另一幅影像:
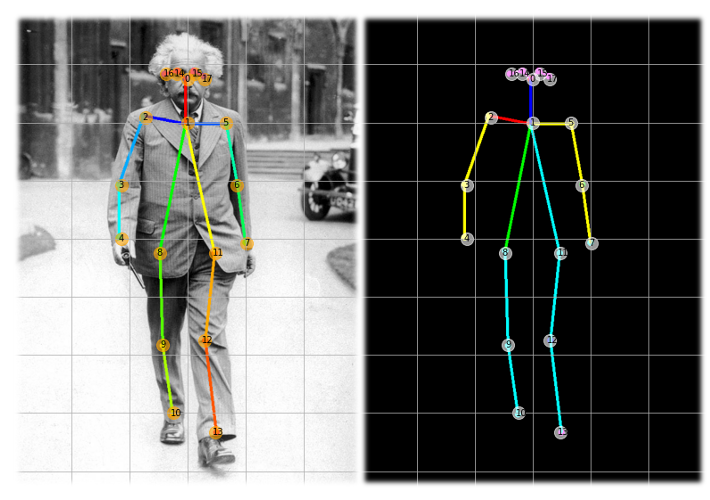
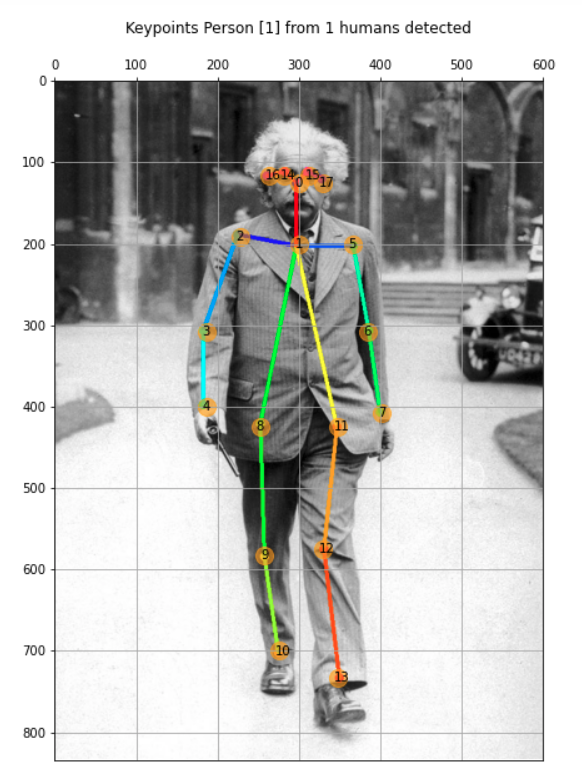
image_path = '../images/einstein_oxford.jpg'
img, hum = get_human_pose(image_path)
keypoints = show_keypoints(img, hum, color='orange')
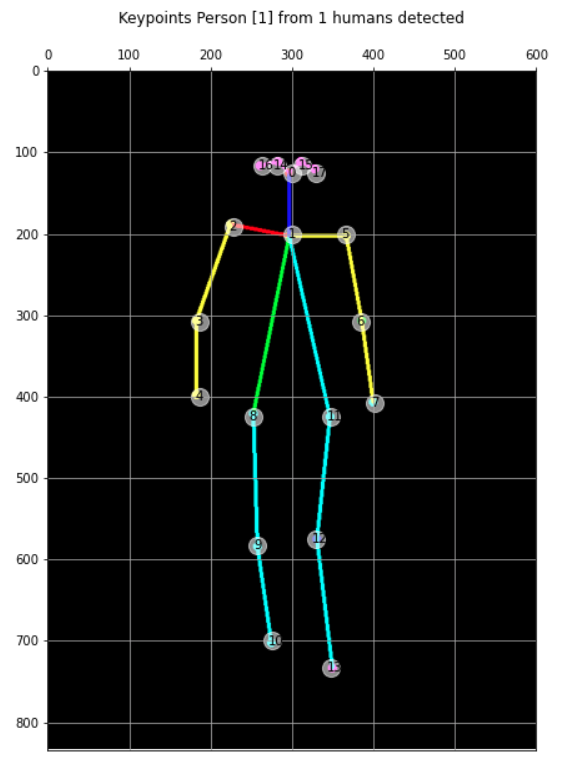
img, hum = get_human_pose(image_path, showBG=False)
keypoints = show_keypoints(img, hum, color='white', showBG=False)
多人影像
到目前為止,只研究了包含一個人的影像,一旦開發出從影像中同時捕捉所有關節(S)和PAF(L)的演算法,為了簡單起見我們找到最可能的連接,因此,獲取結果的代碼是相同的;例如,只有當我們得到結果(“human”)時,串列的大小將與影像中的人數相匹配,
例如,讓我們使用一個有五個人的影像:
image_path = './images/ski.jpg'
img, hum = get_human_pose(image_path)
plot_img(img, axis=False)

演算法發現所有的S和L都與這5個人聯系在一起,結果很好!
從讀取影像路徑到繪制結果,所有程序都不到0.5秒,與影像中發現的人數無關,
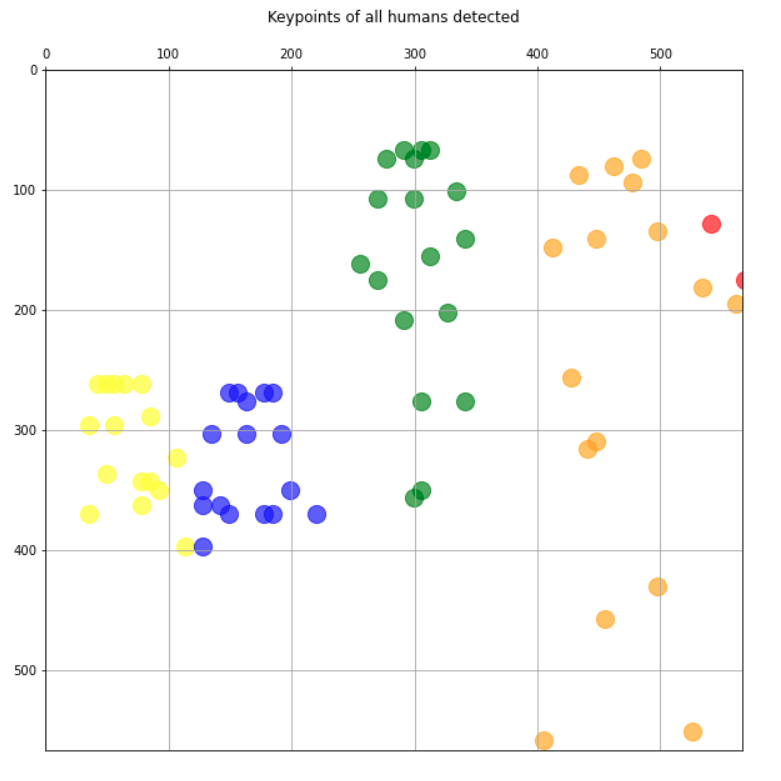
讓我們把它復雜化,讓我們看到一個畫面,人們更“混合”地在一起跳舞:
image_path = '../images/figure-836178_1920.jpg
img, hum = get_human_pose(image_path)
plot_img(img, axis=False)

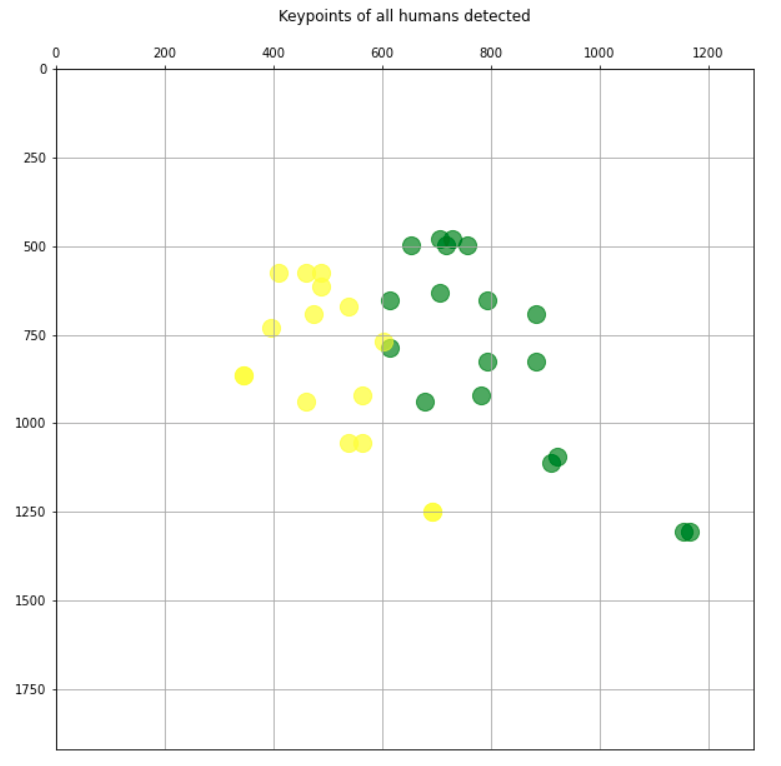
結果似乎也很好,我們只繪制關鍵點,每個人都有不同的顏色:
plt.figure(figsize=(10,10))
plt.axis([0, img.shape[1], 0, img.shape[0]])
plt.scatter(*zip(*keypoints_1), s=200, color='green', alpha=0.6)
plt.scatter(*zip(*keypoints_2), s=200, color='yellow', alpha=0.6)
ax=plt.gca()
ax.set_ylim(ax.get_ylim()[::-1])
ax.xaxis.tick_top()
plt.title('Keypoints of all humans detected\n')
plt.grid();
第三部分:視頻和實時攝像機中的姿勢估計
在視頻中獲取姿勢估計的程序與我們對影像的處理相同,因為視頻可以被視為一系列影像(幀),建議你按照本節內容,嘗試復制Jupyter Notebook:20_Pose_Estimation_Video:https://github.com/Mjrovai/TF2_Pose_Estimation/blob/master/20_Pose_Estimation_Video.ipynb,
OpenCV在處理視頻方面做得非常出色,
因此,讓我們獲取一個.mp4視頻,并使用OpenCV捕獲其幀:
video_path = '../videos/dance.mp4
cap = cv2.VideoCapture(video_path)
現在讓我們創建一個回圈來捕獲每一幀,有了這個框架,我們將應用e.inference(),然后根據結果繪制骨架,就像我們對影像所做的那樣,最后還包括了一個代碼,當按下一個鍵(例如“q”)時停止視頻播放,
以下是必要的代碼:
fps_time = 0
while True:
ret_val, image = cap.read()
humans = e.inference(image,
resize_to_default=(w > 0 and h > 0),
upsample_size=4.0)
if not showBG:
image = np.zeros(image.shape)
image = TfPoseEstimator.draw_humans(image, humans, imgcopy=False)
cv2.putText(image, "FPS: %f" % (1.0 / (time.time() - fps_time)), (10, 10),
cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 2)
cv2.imshow('tf-pose-estimation result', image)
fps_time = time.time()
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
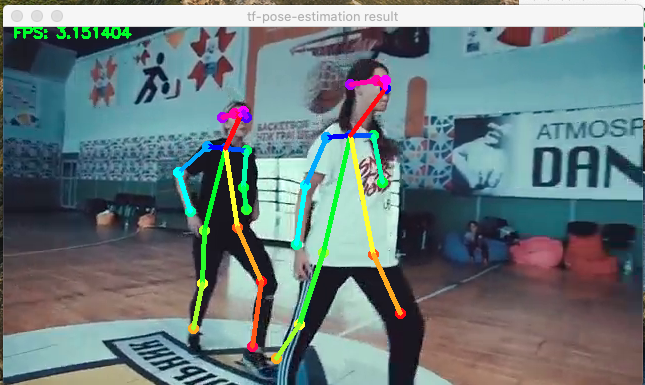
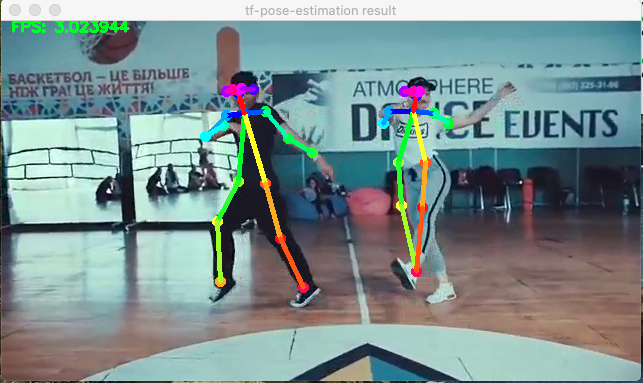
結果很好,但是有點慢,這部電影最初的幀數為每秒30幀,將在“慢攝影機”中運行,大約每秒3幀,
使用實時攝像機進行測驗
建議你按照本節內容,嘗試復制Jupyter Notebook:30_Pose_Estimation_Camera(https://github.com/Mjrovai/TF2_Pose_Estimation/blob/master/30_Pose_Estimation_Camera.ipynb),
運行實時攝像機所需的代碼與視頻所用的代碼幾乎相同,只是OpenCV videoCapture()方法將接收一個整數作為輸入引數,該整數表示實際使用的攝像機,例如,內部攝影機使用“0”和外部攝影機“1”,此外,相機也應設定為捕捉模型使用的“432x368”幀,
引數初始化:
camera = 1
resize = '432x368' # 處理影像之前調整影像大小
resize_out_ratio = 4.0 # 在熱圖進行后期處理之前調整其大小
model = 'mobilenet_thin'
show_process = False
tensorrt = False # for tensorrt process
cam = cv2.VideoCapture(camera)
cam.set(3, w)
cam.set(4, h)
代碼的回圈部分應與視頻中使用的非常相似:
while True:
ret_val, image = cam.read()
humans = e.inference(image,
resize_to_default=(w > 0 and h > 0),
upsample_size=resize_out_ratio)
image = TfPoseEstimator.draw_humans(image, humans, imgcopy=False)
cv2.putText(image, "FPS: %f" % (1.0 / (time.time() - fps_time)), (10, 10),
cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 2)
cv2.imshow('tf-pose-estimation result', image)
fps_time = time.time()
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cam.release()
cv2.destroyAllWindows()
同樣,當使用該演算法時,30 FPS的標準視頻捕獲降低約到10%,
這里有一個完整的視頻,可以更好地觀察到延遲,然而,結果是非常好的!
視頻:https://youtu.be/Ha0fx1M3-B4
結論
一如既往,我希望這篇文章能啟發其他人在這個神奇的人工智能世界里找到自己的路!
本文中使用的所有代碼都可以在GitHub專案上下載:https://github.com/Mjrovai/TF2_Pose_Estimation
原文鏈接:https://towardsdatascience.com/realtime-multiple-person-2d-pose-estimation-using-tensorflow2-x-93e4c156d45f
歡迎關注磐創AI博客站:
http://panchuang.net/
sklearn機器學習中文官方檔案:
http://sklearn123.com/
歡迎關注磐創博客資源匯總站:
http://docs.panchuang.net/
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/79722.html
標籤:其他
上一篇:NS3的Drop丟包率如何回呼
下一篇:求解Liunx系統mv命令的詳解