
著作權宣告:該教程著作權歸北京智能佳科技有限公司所有,未經公司授權禁止參考、發布、轉載等,否則將追究其法律責任,
使用前說明:本使用檔案說明略微簡明,請結合指導視頻進行操作會更容易理解!!
第一章節 BJROBOT ROS 網路配置及移動控制
1.工控機的系統用戶名為 robot,密碼:bjrobot
遠程登錄方式:a.teamview, 輸入工控機IP,密碼即可登錄;
b.ssh登錄:ssh [email protected] 密碼:bjrobot
2.RK3399 Nanopi、樹莓派 4b 的系統用戶名為 pi,密碼也是 pi
遠程登錄方式:a. ssh登錄: ssh [email protected] 密碼:pi
b. vnc,輸入用戶名密碼即可登錄;
(需要先ssh登錄到RK3399,啟動/home/pi目錄下的runVino.sh檔案(啟動命令為:./runVino.sh))
3.英偉達Nano 的系統用戶名為 ubuntu, 密碼:ubuntu
遠程登錄方式:a.vnc,輸入Nano的IP,密碼即可登錄;
b.ssh登錄: ssh [email protected] 密碼:ubuntu
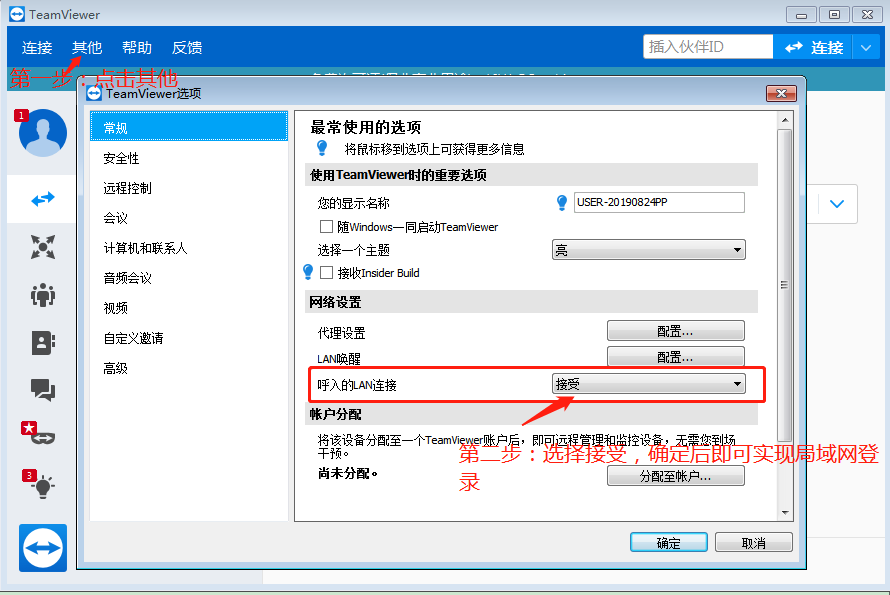
Teamview實作局域網內登錄,需修改teamview選項中的網路設定選項中的呼入的LAN連接選項為<接受>,如下圖所示:
用戶名和密碼是 ssh 連接的關鍵,
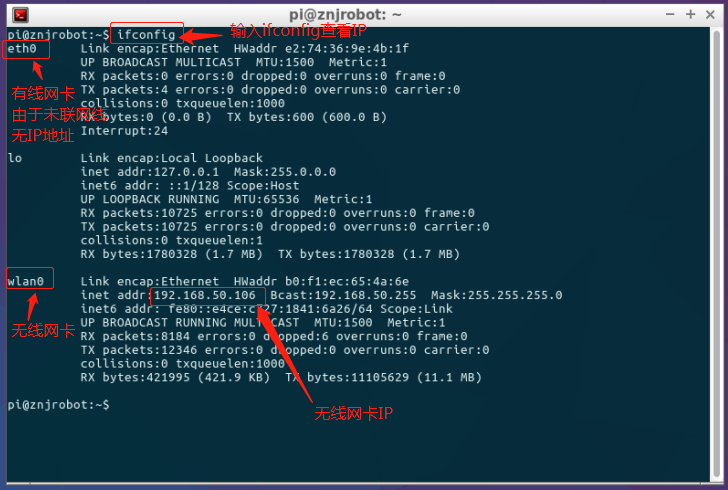
4.把小車組裝好,電池充滿電,小車主控接 HDMI 介面的顯示幕連接無線網路,進入系統,打開一個終端輸入ifconfig,回車,記下小車無線網卡 ip,
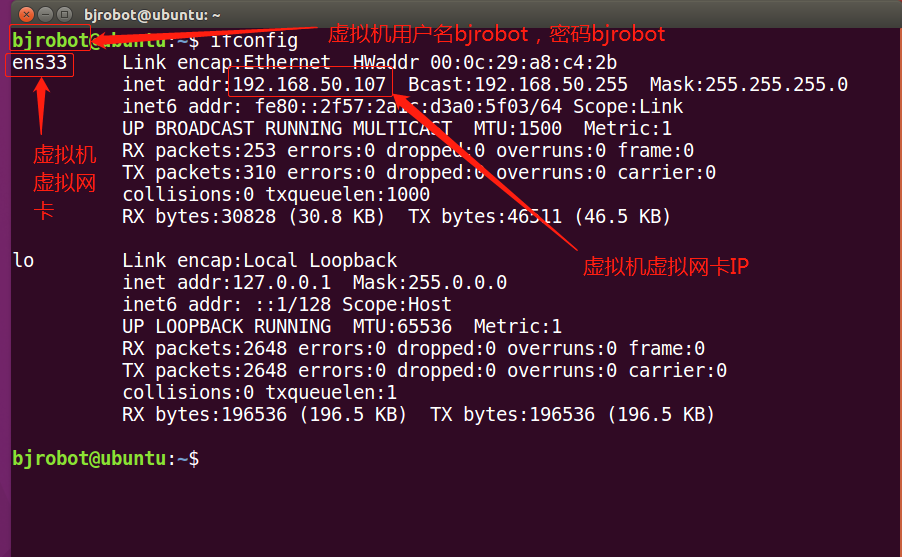
5.下載資料配套虛擬機(我們提供的虛擬機已經安裝好 ROS,已經編譯好我們的原始碼與構建好相關環境),把虛擬機網路設配器設定成橋接模式,
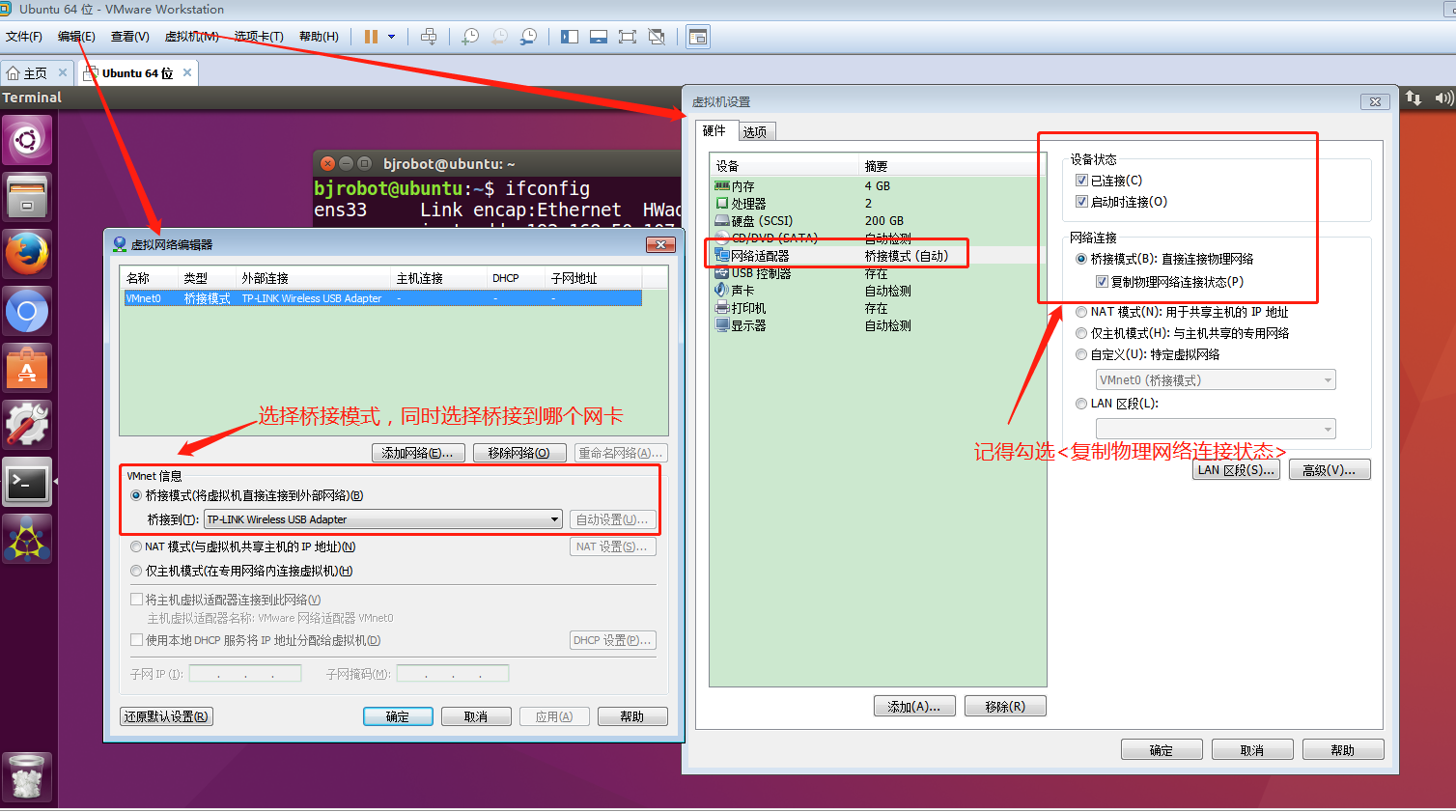
虛擬機確保橋接上PC 的網卡,并且能分配到 IP,跟小車主控連在同一個路由器的局域網內,同一網段!一定要同一網段!!(確保二者能相互ping通)
虛擬機端 vim ~/.bashrc,滑鼠滾輪把游標移動到檔案底端,按下圖操作,
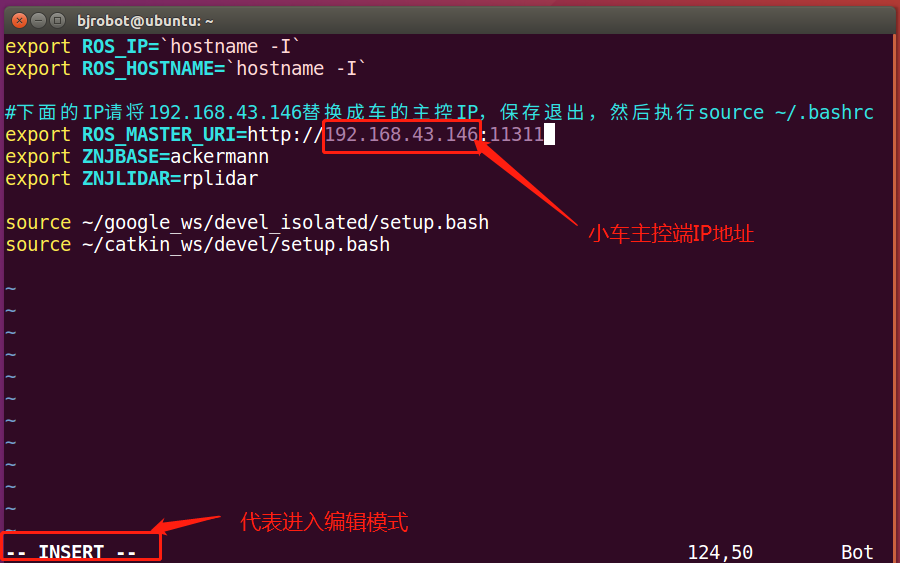
改好之后 退出編輯模式后,source ~/.bashrc 使之馬上生效,
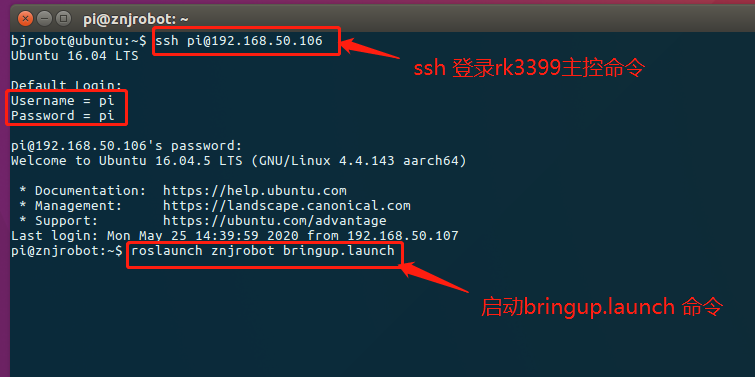
6.至此,虛擬機和主控端的控制相關配置以及設定好,接下來在虛擬機端打開一個終端ssh 過去小車主控端啟動 roslaunch znjrobot bringup.launch ,
7.在虛擬機端再打開另外一個終端直接啟動鍵盤控制,rosrunteleop_twist_keyboard teleop_twist_keyboard.py
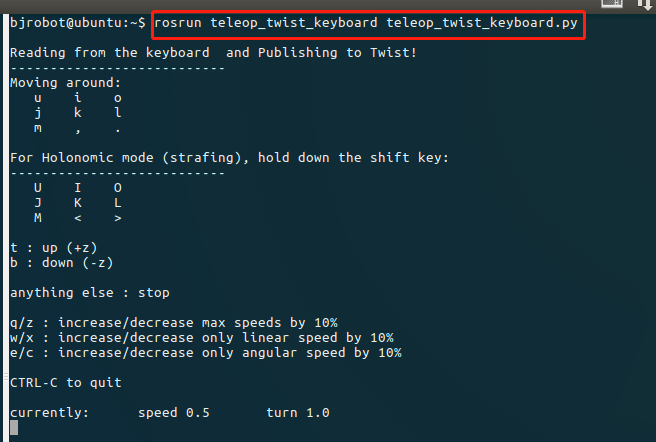
至此小車可以在虛擬機端通過鍵盤進行移動控制,
更多精彩視頻演示和教程請點擊:https://space.bilibili.com/521688736


轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/85225.html
標籤:其他
下一篇:Python太難了無語