目錄
- 1. 概述
- 2. 常規演算法
- 2.1. 理論推導
- 2.2. 具體實作
- 3. 優化演算法
- 3.1. 理論推導
- 3.2. 具體實作
- 4. 參考
1. 概述
任何復雜的三維模型都可以視作空間三角面片的集合,很容易碰到的一個問題就是空間射線與三角形相交的問題,例如拾取、遮蔽檢測等,這里就總結下該問題的兩種演算法實作,
2. 常規演算法
一種很常規的思路就是先計算射線與三角面片的交點,再看該交點是否再三角形內部,
2.1. 理論推導
對于空間一條射線,令起點為O,其方向為D,根據射線的引數公式,其上任意一點P(也就是要求的交點)為:
\[P = O + tD \tag{1} \]
其中t>0,根據t的取值不同,可得射線上不同的點,也就是關鍵在于求未知量t的值,
已知空間三角面片三個頂點為v1,v2,v3,那么很容易可以求得三角面片的法向量n,顯然面上的向量(v1-P)與n是垂直的,則它們的點積為0:
\[(v1-P) \cdot n = 0 \tag{2} \]
將式(1)代入式(2),求得未知量t為:
\[t = \frac{ (v1-O) \cdot n }{ D \cdot n} \]
再將t代入到(1)式中,即可得到射線與該三點組成的平面了,
接下來就是判斷這個交點是否在三角形面之內了,由于是空間三角形,所以比較好的演算法是文獻[2]中提到的同向法,摘錄如下: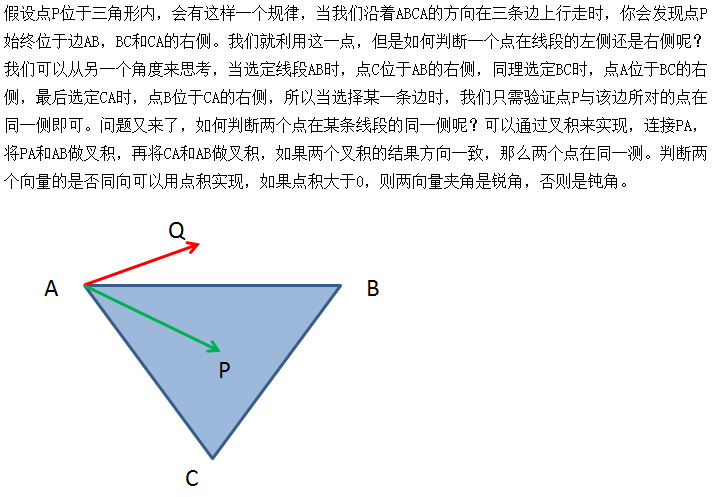
2.2. 具體實作
具體的C/C++實作代碼如下:
#include <iostream>
using namespace std;
#define EPSILON 0.000001
// 3D vector
class Vector3d
{
public:
Vector3d()
{
}
~Vector3d()
{
}
Vector3d(double dx, double dy, double dz)
{
x = dx;
y = dy;
z = dz;
}
// 矢量賦值
void set(double dx, double dy, double dz)
{
x = dx;
y = dy;
z = dz;
}
// 矢量相加
Vector3d operator + (const Vector3d& v) const
{
return Vector3d(x + v.x, y + v.y, z + v.z);
}
// 矢量相減
Vector3d operator - (const Vector3d& v) const
{
return Vector3d(x - v.x, y - v.y, z - v.z);
}
//矢量數乘
Vector3d Scalar(double c) const
{
return Vector3d(c*x, c*y, c*z);
}
// 矢量點積
double Dot(const Vector3d& v) const
{
return x * v.x + y * v.y + z * v.z;
}
// 矢量叉積
Vector3d Cross(const Vector3d& v) const
{
return Vector3d(y * v.z - z * v.y, z * v.x - x * v.z, x * v.y - y * v.x);
}
double _x()
{
return x;
}
double _y()
{
return y;
}
double _z()
{
return z;
}
private:
double x, y, z;
};
// v1 = Cross(AB, AC)
// v2 = Cross(AB, AP)
// 判斷矢量v1和v2是否同向
bool SameSide(Vector3d A, Vector3d B, Vector3d C, Vector3d P)
{
Vector3d AB = B - A;
Vector3d AC = C - A;
Vector3d AP = P - A;
Vector3d v1 = AB.Cross(AC);
Vector3d v2 = AB.Cross(AP);
// v1 and v2 should point to the same direction
//return v1.Dot(v2) >= 0 ;
return v1.Dot(v2) > 0;
}
// 判斷點P是否在三角形ABC內(同向法)
bool PointinTriangle1(Vector3d A, Vector3d B, Vector3d C, Vector3d P)
{
return SameSide(A, B, C, P) && SameSide(B, C, A, P) && SameSide(C, A, B, P);
}
//ray-triangle intersection algorithm (通過平面方程計算)
//引數說明:V1,V2,V3,三角形三點;O,射線原點;D,射線方向
bool ray_triangle_intersection1(Vector3d V1, Vector3d V2, Vector3d V3, Vector3d O, Vector3d D, Vector3d *I)
{
bool rv = false;
//v1(n1,n2,n3);
//平面方程: na * (x – n1) + nb * (y – n2) + nc * (z – n3) = 0 ;
double na = (V2._y() - V1._y())*(V3._z() - V1._z()) - (V2._z() - V1._z())*(V3._y() - V1._y());
double nb = (V2._z() - V1._z())*(V3._x() - V1._x()) - (V2._x() - V1._x())*(V3._z() - V1._z());
double nc = (V2._x() - V1._x())*(V3._y() - V1._y()) - (V2._y() - V1._y())*(V3._x() - V1._x());
//平面法向量
Vector3d nv(na, nb, nc);
//平面法向量與射線方向向量差積
double vpt = D.Dot(nv);
if (vpt == 0)
{
rv = false; //此時直線與平面平行
}
else
{
Vector3d P = V1 - O;
double t = P.Dot(nv) / vpt;
*I = O + D.Scalar(t);
if (PointinTriangle1(V1, V2, V3, *I))
{
rv = true;
}
else
{
rv = false;
}
}
return rv;
}
int main()
{
Vector3d V1(0, 0, 0);
Vector3d V2(50, 0, 0);
Vector3d V3(0, 50, 0);
Vector3d O(5, 10, -10);
Vector3d P(10, 10, 10);
Vector3d D = P - O;
Vector3d I;
if (ray_triangle_intersection1(V1, V2, V3, O, D, &I)) {
cout << I._x() << '\t' << I._y() << '\t' << I._z() << endl;
}
}
3. 優化演算法
仔細思考常規演算法的思路,在計算射線與平面的交點的時候,實際是將射線的引數方程與平面的引數方程聯立求值即可,那么如果知道空間三角形的引數方程,將其與射線的引數方程聯立,不就可以直接求得交點了嗎?Tomas Moller的論文《Fast, Minimum Storage Ray Triangle Intersection》提出了一種優化演算法,正是基于這個思路,并且給出了合理的解法,
3.1. 理論推導
對于三個頂點為V1,V2,V3組成的空間三角形,對于三角形內的任一點,有如下引數方程:
\[P = (1-u-v)V1 + uV2 + vV3 \tag{3} \]
u, v是V2和V3的權重,1-u-v是V1的權重,并且滿足u>=0, v >= 0,u+v<=1,這個引數方程的具體解釋可參考文獻[5],摘錄如下: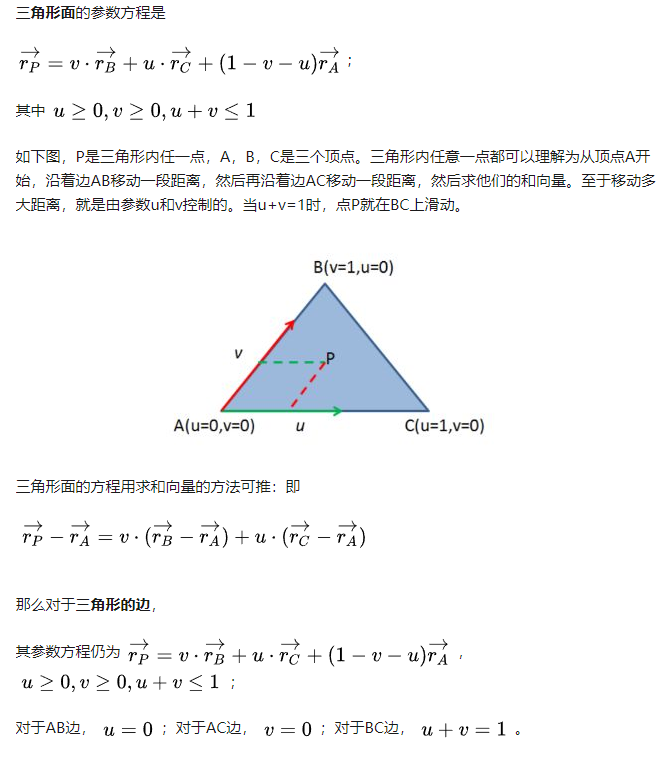
將射線公式(1)與三角形公式(3)聯立起來,有:
\[(1-u-v)V1 + uV2 + vV3 = O + tD \]
很顯然,u、v、t都是未知數,移項并整理,可得如下線性方程組:
\[\left[ \begin{matrix} -D & V2-V1 & V3-V1 \end{matrix} \right] \left[ \begin{matrix} t \\ u \\ v \end{matrix} \right] = O - V1 \]
可以使用克萊姆法則來求解這個線性方程組,大家可以復習下線性代數(文獻[6]),我這里也將其摘錄如下: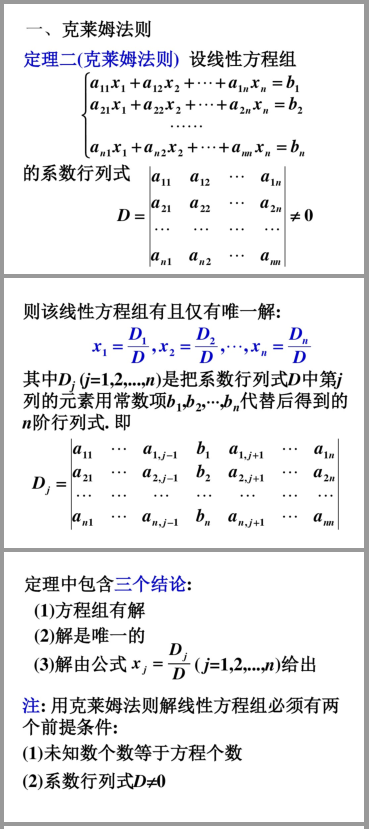
令\(E1 = V2 - V1,E2 = V3 - V1,T = O - V1\),則上式可以改寫成:
\[\left[ \begin{matrix} -D & E1 & E2 \end{matrix} \right] \left[ \begin{matrix} t \\ u \\ v \end{matrix} \right] = T \]
根據克萊姆法則,有:
\[\begin{cases} t = \frac{1}{\begin{vmatrix} -D&E1&E2\\ \end{vmatrix}} \begin{vmatrix} T&E1&E2\\ \end{vmatrix} \\ u = \frac{1}{\begin{vmatrix} -D&E1&E2\\ \end{vmatrix}} \begin{vmatrix} -D&T&E2\\ \end{vmatrix} \\ v = \frac{1}{\begin{vmatrix} -D&E1&E2\\ \end{vmatrix}} \begin{vmatrix} -D&E1&T\\ \end{vmatrix} \\ \end{cases} \]
接下來就要用到向量的混合積公式(具體可參看文獻[7])了,對于三向量a,b,c,有:
\[\begin{vmatrix} a&b&c\\ \end{vmatrix} = a \times b \cdot c = - a \times c \cdot b = - c \times b \cdot a \]
上式可改寫成:
\[\begin{cases} t = \frac{1}{D \times E2 \cdot E1} (T \times E1 \cdot E2) \\ u = \frac{1}{D \times E2 \cdot E1} (D \times E2 \cdot T) \\ v = \frac{1}{D \times E2 \cdot E1} (T \times E1 \cdot D) \\ \end{cases} \]
令\(P=D \times E2, Q = T \times E1\),進一步簡化可得:
\[\begin{cases} t = \frac{1}{P \cdot E1} (Q \cdot E2) \\ u = \frac{1}{P \cdot E1} (P \cdot T) \\ v = \frac{1}{P \cdot E1} (Q \cdot D) \\ \end{cases} \]
3.2. 具體實作
具體的C/C++實作代碼如下:
#include <iostream>
using namespace std;
#define EPSILON 0.000001
// 3D vector
class Vector3d
{
public:
Vector3d()
{
}
~Vector3d()
{
}
Vector3d(double dx, double dy, double dz)
{
x = dx;
y = dy;
z = dz;
}
// 矢量賦值
void set(double dx, double dy, double dz)
{
x = dx;
y = dy;
z = dz;
}
// 矢量相加
Vector3d operator + (const Vector3d& v) const
{
return Vector3d(x + v.x, y + v.y, z + v.z);
}
// 矢量相減
Vector3d operator - (const Vector3d& v) const
{
return Vector3d(x - v.x, y - v.y, z - v.z);
}
//矢量數乘
Vector3d Scalar(double c) const
{
return Vector3d(c*x, c*y, c*z);
}
// 矢量點積
double Dot(const Vector3d& v) const
{
return x * v.x + y * v.y + z * v.z;
}
// 矢量叉積
Vector3d Cross(const Vector3d& v) const
{
return Vector3d(y * v.z - z * v.y, z * v.x - x * v.z, x * v.y - y * v.x);
}
double _x()
{
return x;
}
double _y()
{
return y;
}
double _z()
{
return z;
}
private:
double x, y, z;
};
//ray-triangle intersection algorithm
//引數說明:V1,V2,V3,三角形三點;O,射線原點;D,射線方向,
bool ray_triangle_intersection(Vector3d V1, Vector3d V2, Vector3d V3, Vector3d O, Vector3d D, Vector3d *I)
{
//Find vectors for two edges sharing V1
Vector3d e1 = V2 - V1;
Vector3d e2 = V3 - V1;
//Begin calculating determinant - also used to calculate u parameter
Vector3d P = D.Cross(e2);
//if determinant is near zero, ray lies in plane of triangle
double det = e1.Dot(P);
//NOT CULLING
if (det > -EPSILON && det < EPSILON)
{
return false;
}
double inv_det = 1.f / det;
//calculate distance from V1 to ray origin
Vector3d T = O - V1;
//Calculate u parameter and test bound
double u = T.Dot(P) * inv_det;
//The intersection lies outside of the triangle
if (u < 0.f || u > 1.f)
{
return false;
}
//Prepare to test v parameter
Vector3d Q = T.Cross(e1);
//Calculate V parameter and test bound
double v = D.Dot(Q) * inv_det;
//The intersection lies outside of the triangle
if (v < 0.f || u + v > 1.f)
{
return false;
}
double t = e2.Dot(Q) * inv_det;
//ray intersection
if (t > EPSILON)
{
*I = O + D.Scalar(t);
return true;
}
return false;
}
int main()
{
Vector3d V1(0, 0, 0);
Vector3d V2(50, 0, 0);
Vector3d V3(0, 50, 0);
Vector3d O(5, 10, -10);
Vector3d P(10, 10, 10);
Vector3d D = P - O;
Vector3d I;
if (ray_triangle_intersection(V1, V2, V3, O, D, &I)) {
cout << I._x() << '\t' << I._y() << '\t' << I._z() << endl;
}
}
可以看到這種優化演算法無論是代碼量還是時間、空間復雜度都由于原來的常規演算法,最直觀的體現就是判斷陳述句多,能夠即使回傳避免后續運算,
4. 參考
[1] M?ller–Trumbore intersection algorithm
[2] 判斷點是否在三角形內
[3] 射線與平面的相交檢測(Ray-Plane intersection test)
[4] 射線和三角形的相交檢測(ray triangle intersection test)
[5] 三角形方程? - 高崎汀步的回答 - 知乎
[6] 克萊姆法則
[7] 三矢量的混合積
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/86907.html
標籤:其他
上一篇:選擇排序 C++實作