無刷有感電機測速、速度倍訓控制
1.直流無刷有感電機介紹
無刷直流 (Brushless Direct Current, BLDC)電機是一種正快速普及的電機型別,在移動機器人領域也有諸多應用,這里我們將對無刷直流電機的常見問題進行描述,
(1)作業原理
首先,我們來看一下無刷電機的作業原理,下圖為三電極、二磁極、內轉子無刷電機演示,
無刷電機不是傳統的直流電機,模型雖然是直流電池供電,但通過無刷電調之后就轉變為了三相交變電流傳輸到了三個極性上,通過上圖可以看出,無刷電機是沒有碳刷的,和有刷相反,無刷電機的磁鐵成了轉子,
(2)內轉子與外轉子
上面無刷電機作業原理圖所示的是內轉子無刷電機,顧名思義,磁鐵在里邊,而外轉子無刷電機則相反,它的磁鐵“包”在外面,而A、B、C電極在里邊,這樣的設計可以讓電機的扭力更大,但轉速卻上不來,因為這個原因,一般四旋翼無人機上常見外轉子無刷電機(需要扭矩大),而模型車和模型船一般都使用內轉子無刷電機(需要轉速高),
(3)有感無刷和無感無刷
要說明這個問題首先要弄懂感是啥,有感無刷中的感是指“霍爾傳感器”,那么什么是“霍爾”呢?霍爾是指的霍爾效應,這一現象是美國物理學家霍爾于1879年在研究金屬的導電機構時發現的,當電流垂直于外磁場通過導體時,在導體的垂直于磁場和電流方向的兩個端面之間會出現電勢差,這一現象便是霍爾效應,這個電勢差也被叫做霍爾電勢差,
那么我們為什么要感應這玩意?要說清這個問題就必須從無感無刷的一個缺點說起,無刷電機的轉速是靠交流電頻率決定的,那么電調要想方設法弄明白目前電機的轉速以及當前電機的狀態,其實這對已經正常運轉的電機來說很容易,但對于一個剛剛起步或者運行速度很慢的電機來說就顯得比較麻煩了(很難較準確的測出電機轉速的狀態),所以無感無刷電機會在低速時線性不好甚至可能會顫抖,而起步的扭力也難以強過同等級有刷電機,
但是人們發現無論什么運行狀態的無刷電機,它的霍爾效應都是明顯的,所以通過霍爾效應電調可以很容易的知道無論高速還是低速電機的運行狀態,從而解決了無感無刷電機的毛病!
(4)直流有感無刷電機驅動電路
驅動電路原理
一般有感直流無刷電機的驅動電路是由6個MOS管組成的橋式電路,
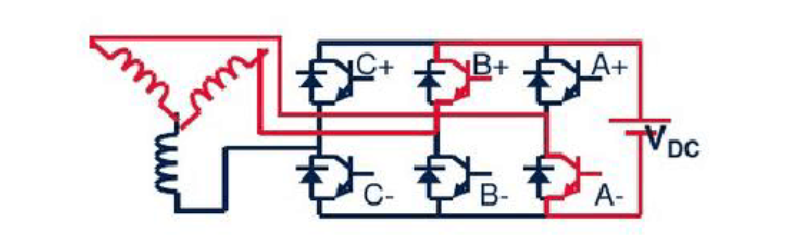
編程控制無刷直流電機運行,其最底層的作業就是控制著6個MOS管的兩個狀態**:導通和關斷**,
根據相關的控制理論,我們可以清晰的得知:
(1)每次只能打開兩個MOS管,保持任意兩個電極上有電,
(2)驅動電路上面一排和下面一排的MOS管不會出現兩個同時打開,只打開一行就只送了一個電極的電,
(3)同一列的MOS管也不會同時打開,同時打開會出現電源短路,
所以6個MOS管的開關狀態只有六種,常見的無刷電機驅動器的電路原型就是這樣,也就是六步換向法的由來,
無刷電機調速原理
如果我們對下面一排MOS管按驅動原理進行一次性的完全打開與關閉,上面一排MOS管按驅動原理通過單片機的PWM進行非完全一次性打開與關斷的,也就是MOS不完全打開,MOS的G極達不到最大電壓值,這樣我們就實作調速了,
表示無刷電機正反轉狀態
通過三個霍爾傳感器的六種狀態表示無刷電機的正反轉程序,一般無刷有感電機都安裝3個霍爾傳感器,關于霍爾傳感器在無刷電機中有以下特點:
(1)霍爾信號不會出現全零(000)和全一(111)兩種狀態,所以,三個霍爾僅存6中狀態,
(2)霍爾的6種狀態是順序變化的,往復回圈,通過先后順序即可判斷電機正反轉,
所以我們是不是可以理解為,任意三個霍爾的組合狀態之后的狀態只有兩種,一個表示正轉,一個表示反轉,
(5)霍爾安裝角度
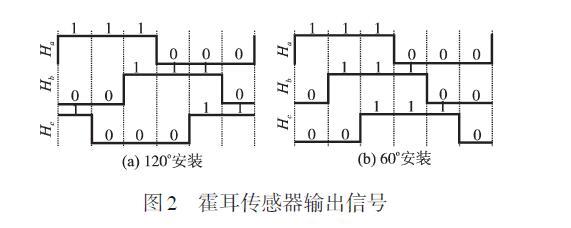
常用的霍耳傳感器安裝方式有120 ° 安裝和60° 安裝2 種,2 種方法都可以輸出6 個不同的霍耳信號,分別對應6 個不同的區域,當無刷直流電機轉子轉到某一區域時,對應的繞組通電,電機就可以正常作業,若霍耳信號與繞組關系錯誤,就無法正常作業,甚至會對電機或功率器件造成損壞,因此,確定霍耳信號與定子繞組關系對于無刷直流電機而言非常重要,
霍耳傳感器常用來檢測無刷直流電機換相點,三相無刷直流電機需要3 個霍耳傳感器來檢測6 個不同的位置,霍耳傳感器的安裝有120° 安裝和60° 安裝2 種方式,120° 安裝指3 個霍耳傳感器互差120° (電角度),而60°安裝指3 個霍耳傳感器互差60° (電角度),2 種安裝方式最大的區別在于采用60 ° 安裝時可以輸出“000”和“111”信號,而120° 安裝則不會輸出這2 個信號,通過這一點可以判斷霍耳傳感器的安裝方式,
霍爾的安裝角度,對驅動器的選擇有很大的影響,通常賣家都會問無刷電機的霍爾安裝角度,
2.STM32無刷電機輪速測量
(1)測速方法:
單片機轉速測量的演算法很多,主要有頻率測速法(M法)、周期測速法(T法)等,
M 測速法:通過在相同的時間T間隔內計算傳感器輸出的脈沖個數來算出轉速;
設R為每轉的脈沖信號數,T為間隔時間,M為T時間內測得的脈沖數,可見這種測速法的解析度取決于電機轉一周的輸出R和測速周期T,極對數越多或測量周期越長,則解析度越小,但一般電機的R不大,且測量周期不宜過大,因為測量周期過大為影響測速的反應速度,降低系統的實時性,所以這種方法是不可取的,
T法測速:通過測量傳感器發出的相鄰兩個脈沖之間的T來算出轉速;因為相鄰兩個脈沖對應輪子上的物理距離N是確定的,
用一個計數器對三個霍爾的脈沖信號進行采集;從一個脈沖觸發開始計時,到下一個脈沖觸發新的計時,測得每兩個脈沖間的時間T;
所以,T法測速的電機速度speed=N/T;
注意,關于N的獲得有兩種方法,一、根據電機引數即可獲得,用輪子周長除以輪子轉一圈的脈沖數,二、可以測量10圈輪子累積脈沖,求平均值,
(2)測速的技術要求:
(1)盡量精細化速度解析度,所以采用T法測速
(2)計算出輪子的實際線速度m/s,而不是電機的轉速,所以要明確兩個脈沖對應輪子轉動的物理距離,
(3)用速度的正負值明確分辨輪子正反轉,所以要根據判斷前后霍爾組合狀態來判斷電機所謂的正反,
(3)實作方式:
? 首先,通過單片機的外部觸發中斷,獲得同一觸發時刻的三個霍爾信號狀態并通過二進制組合成狀態數字;根據下一次的狀態數字,進行速度正反的區分,
? 其次,通過單片機的定時計數器,測算每兩個脈沖之間的時間,即一個上升沿到一個下降沿的時間,或者一個下降沿到上升沿的時間,或者一個下降沿到一個下降沿的時間等等,
? 最后,進行速度計算,符號改變即可,
? 注意,這里說的每兩個脈沖不是一個霍爾的每兩個脈沖而是三個霍爾中的每兩個脈沖,這個脈沖既包括上升沿又包括下降沿,
(4)使用設備以及軟體:
? STM32F103單片機 + 120度霍爾的無刷有感電機 + keil5,
(5)具體代碼實作:
下面以一個電機為例,具體的原始碼工程檔案,可以在公眾號:小白學移動機器人,發送:無刷電機測速,既可獲得,
外部中斷配置代碼:
//電機霍爾外部中斷配置函式
void Hall_EXIT_Config(GPIO_TypeDef* GPIOx,uint16_t GPIO_Pin)
{
GPIO_InitTypeDef GPIO_InitStructure;
EXTI_InitTypeDef EXTI_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
u8 EXTI_IRQn;
uint8_t GPIO_PortSource,GPIO_PinSource;
uint32_t EXTI_Line;
//外部中斷,需要使能AFIO時鐘
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
//使能GPIO時鐘
if(GPIOx == GPIOA) RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE),GPIO_PortSource = GPIO_PortSourceGPIOA;
else if(GPIOx == GPIOB) RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE),GPIO_PortSource = GPIO_PortSourceGPIOB;
else if(GPIOx == GPIOC) RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE),GPIO_PortSource = GPIO_PortSourceGPIOC;
else if(GPIOx == GPIOD) RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOD, ENABLE),GPIO_PortSource = GPIO_PortSourceGPIOD;
else if(GPIOx == GPIOE) RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOE, ENABLE),GPIO_PortSource = GPIO_PortSourceGPIOE;
else if(GPIOx == GPIOF) RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOF, ENABLE),GPIO_PortSource = GPIO_PortSourceGPIOF;
else if(GPIOx == GPIOG) RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOG, ENABLE),GPIO_PortSource = GPIO_PortSourceGPIOG;
//選擇中斷線,中斷服務函式
if(GPIO_Pin == GPIO_Pin_0) GPIO_PinSource = GPIO_PinSource0, EXTI_Line = EXTI_Line0, EXTI_IRQn = EXTI0_IRQn;
else if(GPIO_Pin == GPIO_Pin_1) GPIO_PinSource = GPIO_PinSource1, EXTI_Line = EXTI_Line1, EXTI_IRQn = EXTI1_IRQn;
else if(GPIO_Pin == GPIO_Pin_2) GPIO_PinSource = GPIO_PinSource2, EXTI_Line = EXTI_Line2, EXTI_IRQn = EXTI2_IRQn;
else if(GPIO_Pin == GPIO_Pin_3) GPIO_PinSource = GPIO_PinSource3, EXTI_Line = EXTI_Line3, EXTI_IRQn = EXTI3_IRQn;
else if(GPIO_Pin == GPIO_Pin_4) GPIO_PinSource = GPIO_PinSource4, EXTI_Line = EXTI_Line4, EXTI_IRQn = EXTI4_IRQn;
else if(GPIO_Pin == GPIO_Pin_5) GPIO_PinSource = GPIO_PinSource5, EXTI_Line = EXTI_Line5, EXTI_IRQn = EXTI9_5_IRQn;
else if(GPIO_Pin == GPIO_Pin_6) GPIO_PinSource = GPIO_PinSource6, EXTI_Line = EXTI_Line6, EXTI_IRQn = EXTI9_5_IRQn;
else if(GPIO_Pin == GPIO_Pin_7) GPIO_PinSource = GPIO_PinSource7, EXTI_Line = EXTI_Line7, EXTI_IRQn = EXTI9_5_IRQn;
else if(GPIO_Pin == GPIO_Pin_8) GPIO_PinSource = GPIO_PinSource8, EXTI_Line = EXTI_Line8, EXTI_IRQn = EXTI9_5_IRQn;
else if(GPIO_Pin == GPIO_Pin_9) GPIO_PinSource = GPIO_PinSource9, EXTI_Line = EXTI_Line9, EXTI_IRQn = EXTI9_5_IRQn;
else if(GPIO_Pin == GPIO_Pin_10) GPIO_PinSource = GPIO_PinSource10,EXTI_Line = EXTI_Line10,EXTI_IRQn = EXTI15_10_IRQn;
else if(GPIO_Pin == GPIO_Pin_11) GPIO_PinSource = GPIO_PinSource11,EXTI_Line = EXTI_Line11,EXTI_IRQn = EXTI15_10_IRQn;
else if(GPIO_Pin == GPIO_Pin_12) GPIO_PinSource = GPIO_PinSource12,EXTI_Line = EXTI_Line12,EXTI_IRQn = EXTI15_10_IRQn;
else if(GPIO_Pin == GPIO_Pin_13) GPIO_PinSource = GPIO_PinSource13,EXTI_Line = EXTI_Line13,EXTI_IRQn = EXTI15_10_IRQn;
else if(GPIO_Pin == GPIO_Pin_14) GPIO_PinSource = GPIO_PinSource14,EXTI_Line = EXTI_Line14,EXTI_IRQn = EXTI15_10_IRQn;
else if(GPIO_Pin == GPIO_Pin_15) GPIO_PinSource = GPIO_PinSource15,EXTI_Line = EXTI_Line15,EXTI_IRQn = EXTI15_10_IRQn;
//引腳初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin; //埠配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //上拉輸入
GPIO_Init(GPIOx, &GPIO_InitStructure); //根據設定引數初始化GPIO
GPIO_EXTILineConfig(GPIO_PortSource,GPIO_PinSource);
EXTI_InitStructure.EXTI_Line = EXTI_Line;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising_Falling; //上升下降都觸發
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitStructure); //根據EXTI_InitStruct中指定的引數初始化外設EXTI暫存器
NVIC_InitStructure.NVIC_IRQChannel = EXTI_IRQn; //使能按鍵所在的外部中斷通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x02; //搶占優先級2,
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x01; //子優先級1
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能外部中斷通道
NVIC_Init(&NVIC_InitStructure);
}
定時器配置代碼:
void TIM4Init(u16 Timing,u16 Divis)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE);
TIM_TimeBaseStructure.TIM_Period = Timing;//計數值
TIM_TimeBaseStructure.TIM_Prescaler = Divis; //預分頻值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //不分頻72Mhz時鐘頻率
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;//向上計數模式
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure);
TIM_ITConfig(TIM4,TIM_IT_Update,ENABLE); //允許定時器3更新中斷
TIM_Cmd(TIM4, ENABLE);//開啟TIM4
NVIC_InitStructure.NVIC_IRQChannel=TIM4_IRQn; //定時器4中斷
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=0x03; //搶占優先級3
NVIC_InitStructure.NVIC_IRQChannelSubPriority=0x01; //子優先級1
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
左輪三相霍爾處理函式:
//左輪三相霍爾處理函式
void left_hall_deal(TIM_TypeDef* TIMx,char *motor_state,char *hall_state_last,char *hall_state_now,unsigned short int *count,double *speed)
{
if(*motor_state==2){ //如果是靜止狀態,之前的計數,不論是什么樣子都為零
*count=0; //計數為零
TIM_SetCounter(TIMx,0); //定時器清零
}
else //如果不是靜止狀態
{
*count=TIM_GetCounter(TIMx);//記錄兩個脈沖之間的定時器的計數值
TIM_SetCounter(TIMx,0); //清零定時計數器,開始新的計數
}
if(*count==0){ //如果定時計數器計數為零,則速度為零
*speed=0;
}
else if(*count>10) //防止重復進入中斷,因為電機的速度不會達到,16077.1mm/s = 16.0071m/s
{
//0.5/311.0=0.00160771704 每兩個脈沖之間輪子走的真實距離,這里根據大家自己的情況輪子情況而定
//0.001607717/(1/100000.0)=160.771704 兩個脈沖之間只計量到一個數的速度是160.771704m/s,這里的100000是因為定時器的計數頻率是100k,也就是每記一個數用時1/100000s,
//計數器個數越多,速度越小,個數超過10000認為靜止,10000可以修改,也就是計數器的溢位值
*speed=1000*160.771704/(double)*count;
*count=0; //速度計算完畢,計數快取清零,等待下次計數
}
//獲取三路霍爾的組合狀態的一種容易理解的方法
*hall_state_now=(GPIO_ReadInputDataBit(GPIOE,GPIO_Pin_10)<<2)|(GPIO_ReadInputDataBit(GPIOE,GPIO_Pin_11)<<1)|(GPIO_ReadInputDataBit(GPIOE,GPIO_Pin_12));
if(*count>10||*count==0)
{
switch(*hall_state_last)
{// 反轉 正轉 不變
case 1:if(*hall_state_now!=3){*motor_state=1;}else if(*hall_state_now==1){}else{*motor_state=0;};break;
case 3:if(*hall_state_now!=2){*motor_state=1;}else if(*hall_state_now==3){}else{*motor_state=0;};break;
case 2:if(*hall_state_now!=6){*motor_state=1;}else if(*hall_state_now==2){}else{*motor_state=0;};break;
case 6:if(*hall_state_now!=4){*motor_state=1;}else if(*hall_state_now==6){}else{*motor_state=0;};break;
case 4:if(*hall_state_now!=5){*motor_state=1;}else if(*hall_state_now==4){}else{*motor_state=0;};break;
case 5:if(*hall_state_now!=1){*motor_state=1;}else if(*hall_state_now==5){}else{*motor_state=0;};break;
default:break;
}
}
if(*motor_state==1) //根據電機正反,給速度符號
*speed=-*speed;
*hall_state_last=*hall_state_now;//記錄上一次霍爾組合狀態,用于下一次判斷電機正反
}
左輪三相霍爾中斷服務函式:
//L
void EXTI15_10_IRQHandler(void)
{
if(EXTI_GetITStatus(EXTI_Line10)==SET){
EXTI_ClearITPendingBit(EXTI_Line10); //清除LINE10線路掛起位
}
if(EXTI_GetITStatus(EXTI_Line11)==SET){
EXTI_ClearITPendingBit(EXTI_Line11); //清除LINE11線路掛起位
}
if(EXTI_GetITStatus(EXTI_Line12)==SET){
EXTI_ClearITPendingBit(EXTI_Line12); //清除LINE12線路掛起位
}
left_hall_deal(TIM4,&left_motor_state,&left_hall_state_last,&left_hall_state_now,&left_count,&left_speed);
}
定時器中斷服務函式:
void TIM4_IRQHandler(void)
{
if(TIM_GetITStatus(TIM4,TIM_IT_Update)==SET) //溢位中斷
{
TIM_ClearITPendingBit(TIM4,TIM_IT_Update); //清除中斷標志位
left_motor_state=2;//電機靜止,還需要根據具體情況,測量電機最低速是多少
left_count=0;
left_speed=0;
}
}
主函式:
//=================================頭檔案===================================
#include "sys.h"
#include "delay.h"
#include "exti.h"
#include "tim4.h"
/*===================================================================
程式功能:直流無刷有感電機的速度測量測驗
程式撰寫:公眾號:小白學移動機器人
其他 :如果對代碼有任何疑問,可以私信小編,一定會回復的,
=====================================================================
------------------關注公眾號,獲得更多有趣的分享---------------------
===================================================================*/
int main(void)
{
GPIO_PinRemapConfig(GPIO_Remap_SWJ_Disable,ENABLE);
GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable,ENABLE);//禁用JTAG 啟用 SWD
NVIC_PriorityGroupConfig(2); //=====設定中斷分組
delay_init(); //=====延時函式初始化
Hall_EXIT_Config(GPIOE,GPIO_Pin_10); //LA 霍爾外部中斷檢測用
Hall_EXIT_Config(GPIOE,GPIO_Pin_11); //LB
Hall_EXIT_Config(GPIOE,GPIO_Pin_12); //LC
TIM4Init(10000-1,720-1); //=====測速用
while(1)
{
}
}
//===================================END======================================
3.STM32無刷電機速度PID倍訓控制
關于無刷電機的速度倍訓控制和有刷直流除了速度測量之外沒有區別,可以參照我之前的文章,下方鏈接,點擊訪問,
https://blog.csdn.net/zhao_ke_xue/article/details/108112694
4.參考:
https://blog.csdn.net/dddxxxx/article/details/52564571
https://wenku.baidu.com/view/938a55d3162ded630b1c59eef8c75fbfc77d94d7.html
https://blog.csdn.net/do_just/article/details/52443442
5.公眾號:
如果你感覺,我的文章比較適合你,關注我,點個贊,給你不一樣的驚喜,

轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/99984.html
標籤:其他