這是自己編的程式
clear;clc;close all;
theta1=11.2888956400928;theta2=-9.50268282193131;theta3=21.4158139249666;
theta4=-0.412975269285272;theta5=-17.7139868990766;theta6= -158.686302955714;
d1=0.445; d2=0; d3=0; d4=0.795; d5=0; d6=0.085;
a0=0; a1=0.150; a2=0.700; a3=0.115; a4=0; a5=0;
alpha0=0; alpha1=-90; alpha2=0; alpha3=-90; alpha4=90; alpha5=-90;
% MDH模型
T1=[cosd(theta1), -sind(theta1), 0, a0;sind(theta1)*cosd(alpha0), cosd(theta1)*cosd(alpha0), -sind(alpha0), -
d1*sind(alpha0);sind(theta1)*sind(alpha0),cosd(theta1)*sind(alpha0),cosd(alpha0),d1*cosd(alpha0);0,0,0,1];
T2=[cosd(theta2-90), -sind(theta2-90), 0, a1;sind(theta2-90)*cosd(alpha1), cosd(theta2-90)*cosd(alpha1), -sind(alpha1), -
d2*sind(alpha1);sind(theta2-90)*sind(alpha1),cosd(theta2-90)*sind(alpha1),cosd(alpha1),d2*cosd(alpha1);0,0,0,1];
T3=[cosd(theta3), -sind(theta3), 0, a2;sind(theta3)*cosd(alpha2), cosd(theta3)*cosd(alpha2), -sind(alpha2), -
d3*sind(alpha2);sind(theta3)*sind(alpha2),cosd(theta3)*sind(alpha2),cosd(alpha2),d3*cosd(alpha2);0,0,0,1];
T4=[cosd(theta4), -sind(theta3), 0, a3;sind(theta4)*cosd(alpha3), cosd(theta4)*cosd(alpha3), -sind(alpha3), -
d4*sind(alpha3);sind(theta4)*sind(alpha3),cosd(theta4)*sind(alpha3),cosd(alpha3),d4*cosd(alpha3);0,0,0,1];
T5=[cosd(theta5), -sind(theta5), 0, a4;sind(theta5)*cosd(alpha4), cosd(theta5)*cosd(alpha4), -sind(alpha4), -
d5*sind(alpha4);sind(theta5)*sind(alpha4),cosd(theta5)*sind(alpha4),cosd(alpha4),d5*cosd(alpha4);0,0,0,1];
T6=[cosd(theta6+180), -sind(theta6+180), 0, a5;sind(theta6+180)*cosd(alpha5), cosd(theta6+180)*cosd(alpha5), -sind(alpha5), -
d6*sind(alpha5);sind(theta6+180)*sind(alpha5),cosd(theta6+180)*sind(alpha5),cosd(alpha5),d6*cosd(alpha5);0,0,0,1];
t=T1*T2*T3*T4*T5*T6;t=vpa(t,8)
下邊是用MATLAB工具箱編的程式
clear;clc;close all;
q =[11.2888956400928,-9.50268282193131,21.4158139249666,-0.412975269285272,-17.7139868990766,-158.686302955714];
q = q * pi/180; %角度轉換為弧度
%構建工業機器人模型
L1 = Link([0 0.445 0 0 0 0],'modified');
L2 = Link([-pi/2 0 0.15 -pi/2 0 -pi/2],'modified');
L3 = Link([0 0 0.7 0 0 0],'modified');
L4 = Link([0 0.795 0.115 -pi/2 0 0],'modified');
L5 = Link([0 0 0 pi/2 0 0],'modified');
L6 = Link([pi 0.085 0 -pi/2 0 pi],'modified');
robot = SerialLink([ L1 L2 L3 L4 L5 L6 ],'name','ABB2600');%將以上引數賦予robot函式
T6 = robot.fkine(q) %六軸工業機器人末端位姿
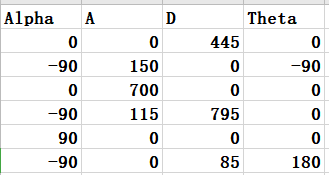
DH引數如圖
新入小白,求大神解惑,查了兩天了也不知道哪的問題,結果總是后兩列一致,前兩列不一樣。
uj5u.com熱心網友回復:
我知道了,一個低級錯誤
轉載請註明出處,本文鏈接:https://www.uj5u.com/shujuku/100634.html
標籤:疑難問題
上一篇:無知的弟弟