我發覺他們論文更注重仿真,北京飛不了無人機也是可以做無人機研究的,
仿真或許也能更好排除其他因素干擾快速進行演算法驗證和迭代,實際飛無人機,飛得不好可能是電機等等其他原因,這也不好進行效果的判斷,,,而且不好測量,
怪不得他們都用仿真平臺,也用matlab,也要對四軸飛行器進行建模,
我想起全權最近出了一本書里面就是專門講無人機仿真的!!!!!!!!這個豈不是太棒了,真的是專門為科研作業者準備的,

部分摘自:https://blog.csdn.net/sinat_16643223/article/details/108819159
而且似乎他們弄無人機很多用仿真了,實物都不用了....真的是脫離工程了,,,
他們研究演算法的可能更多靠仿真了,
你的控制演算法,濾波演算法好不好,拿仿真資料來說話,
徐老師之前講一些學生的畢業論文,也不是說到里面仿真的圖么,
這樣也才能快速進行演算法的迭代,
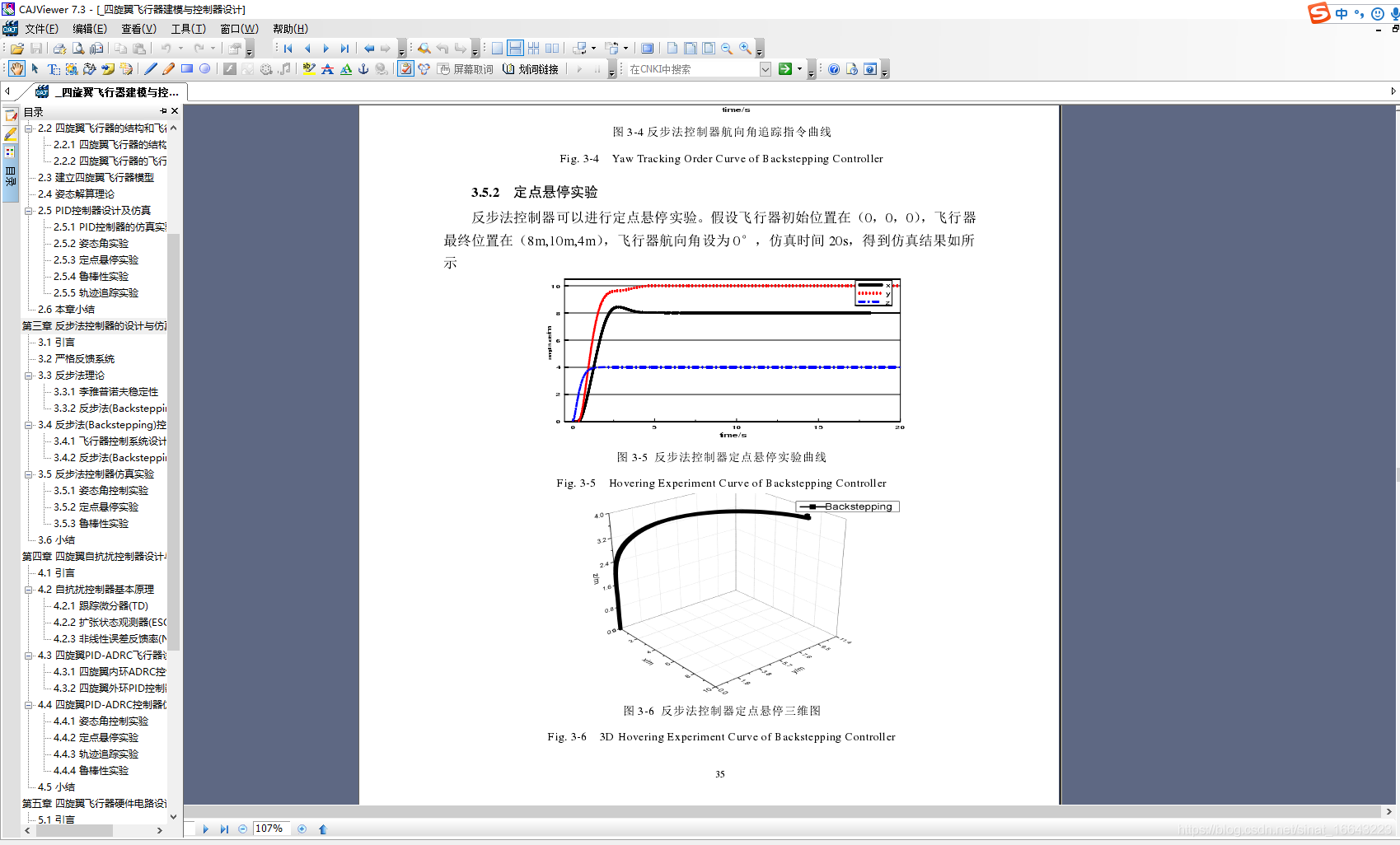
我剛看的無人機的這篇畢業論文也是仿真資料來說話了,這樣也不用擔心在北京飛不了無人機了,
可能搞理論研究就得把實際的東西簡化一下...
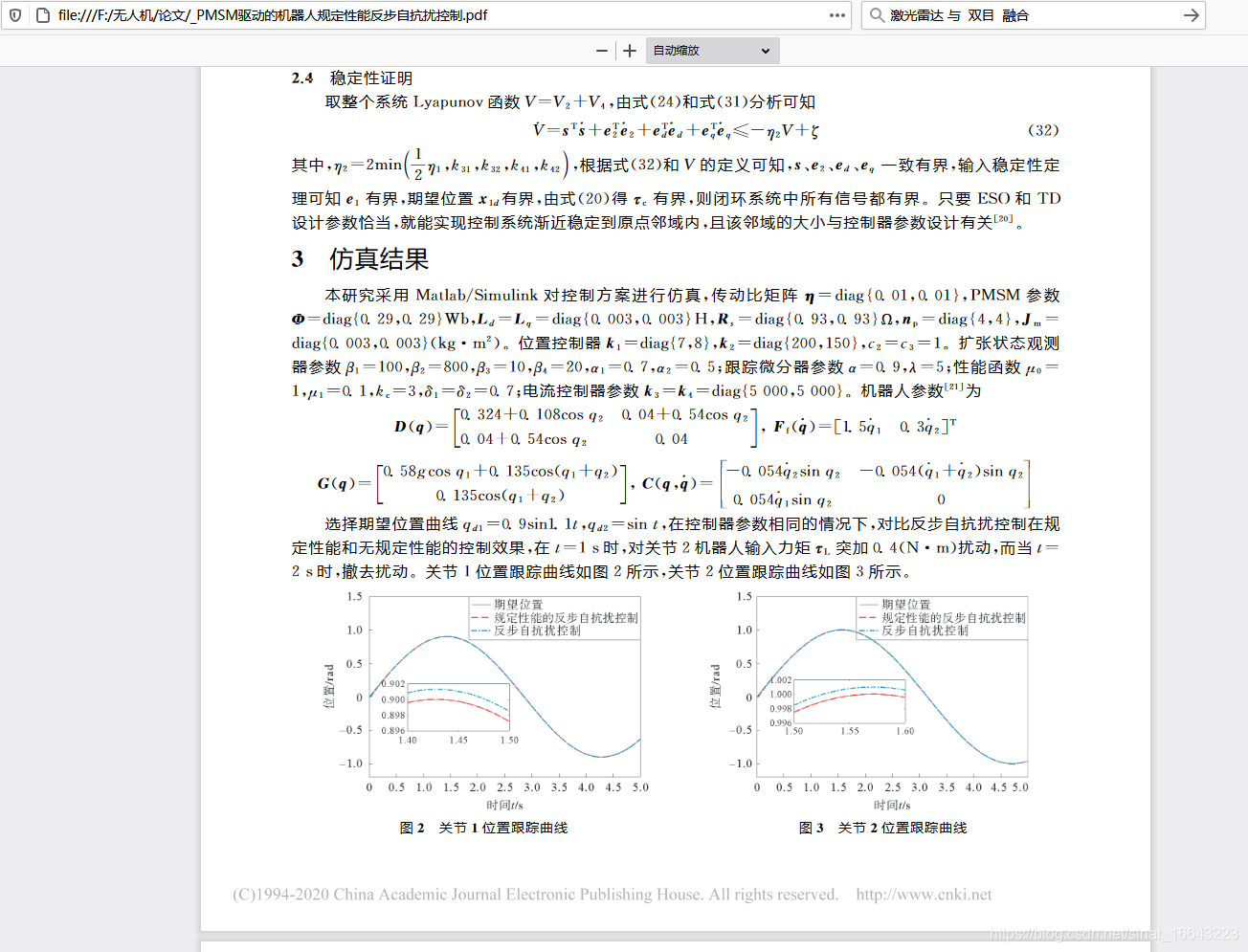
這個也是用仿真對比,
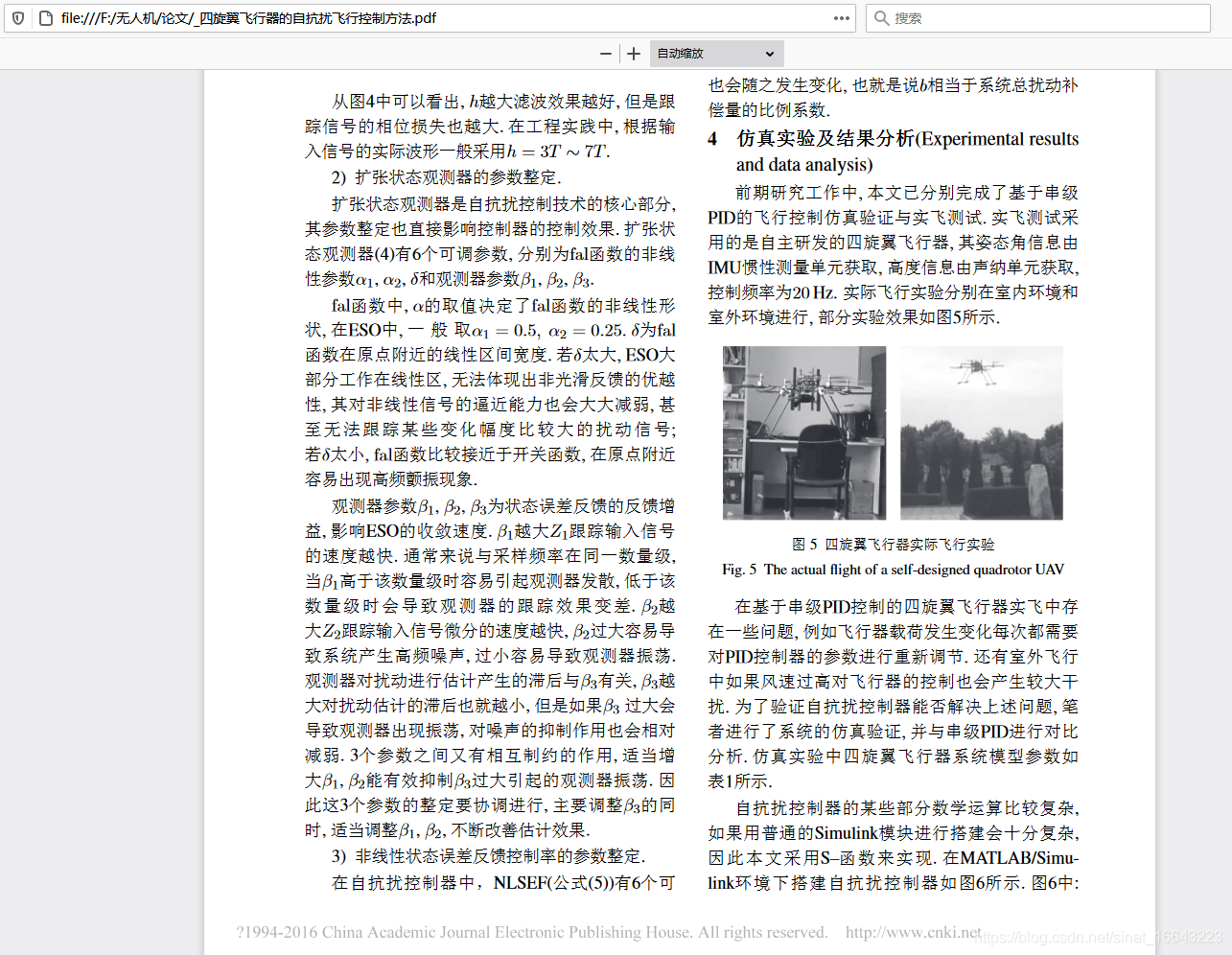
這個無人機也是仿真驗證
這都直接說哦沒有在實物上跑,
XTDrone也是用來仿真的,還有gazebo
他們本身也是建議先在仿真平臺跑通了再去實際的機子上飛,你之前直接實機飛是因為用的別人現成驗證過的演算法和程式,你自己去弄演算法,那還是肯定先仿真,
阿木也有專門的課弄無人機的仿真
https://bbs.amovlab.com/plugin.php?id=zhanmishu_video:video&mod=video&cid=20
轉載請註明出處,本文鏈接:https://www.uj5u.com/shujuku/139842.html
標籤:其他
上一篇:華為20級技術官耗巨資整合出交換機TCP/IP網路協議精髓
下一篇:帶你快速入門Arduino