研究、開發了真空斷路器機械特性測驗系統,克服了以往的一些應用難題,能實作包括機械、電氣、觸頭溫度等多種斷路器運行特性的綜合監測;該系統采用上下位機結構,下位機是一個基于TI公司的VC33數字信號處理器的資料采集系統,并擁有簡單的人機介面,硬體設計中采用了可編程邏輯理念,軟體設計中采用模塊化的組合思想,大大提高了軟體開發的高效性和維護的靈活性,縮短了系統的開發周期;上位機實作資料的存盤、狀態量的顯示和波形的顯示,可以與其他高級軟體介面,進行資料交換,上下位機之間采用485串行通訊總線進行通訊,
在配電線路中常用的保護元件主要是斷路器,斷路器是近年來發展最為迅速的一種保護電器,在低壓網路中,普遍用的是塑殼式斷路器或框架式斷路器,而在中壓及高壓網路中主要用的是少油斷路器、多油斷路器、SFs斷路器及真空斷路器,作為電力系統控制和保護設備,高壓斷路器動作的可靠性對供電可靠性有著極大的影響,影響高壓斷路器可靠性的一個主要因素就是其操動機構的可靠性,據國際大電網CIGRE對斷路器故障調查的統計結果可知,斷路器70. 3%的故障是由于操動機構的機械故障引起的,為進一步提高斷路器的可靠性,有必要研制新型的斷路器操動機構,近年來,一種用于中壓真空斷路器的永磁保持、電子控制的新型操動機構(永磁機構)引起了開關行業的關注并成為電器制造企業和運行部門研究的熱點,開發針對永磁機構斷路器的機械特性測驗裝置對于研究新型永磁操動機構機械特性、提高其可靠性具有重要的意義,
本文采用DSP TMS320LF2407開發了一套用于永磁機構真空斷路器的機械特性測驗系統,該測驗系統利用DSP完成對永磁機構斷路器相關引數的快速、準確檢測和轉換運算;經傳感器采集,并由DSP轉換運算后的各種信號通過CAN總線上傳至上位PC機,
1.1系統監測物件
通過對斷路器的機械結構、電氣性能分析,本系統確定了如下幾個監測物件:行程—時間特性、分合閘線圈電流、觸頭溫度和開斷電流,
1.2行程-時間特性
行程—時間特性是斷路器作業狀態的重要表征,通過對行程位移的監測可以有效的分析斷路器的操作機構的觸頭運行程序,計算出斷路器的行程、觸頭分合閘速度,進而判斷斷路器的操作機構的健康狀況,測量動觸頭的行程-時間曲線,最直接的方法是在動觸頭下或觸頭的絕緣拉桿下安裝直線位移傳感器,但是對于小車式的斷路器來說,其結構非常緊湊,在動觸頭和絕緣拉桿附近可以用來安裝直線傳感器的空間非常有限,而且傳感器如裝在動觸頭處還存在高電位隔離問題,考慮到斷路器的動觸頭在分合閘程序中,其運動行程規律與主軸連動桿運動行程規律之間有著固定的聯系,因而可以通過在主軸上安裝角位移傳感器測量斷路器主軸的分合閘角位移-時間曲線來間接得到動觸頭的直線位移-時間曲線,系統選用的角位移傳感器型號為WYT-3,該傳感器采用新型磁敏感元件,將機械轉動或角位移轉化為電信號輸出,可無觸點的測量轉動角度的變化,輸出模擬電壓信號,
對分合閘線圈電流的測量基本上都采用霍爾電流傳感器,主要就是傳感器的選型問題,首先,作為一套在線監測系統,不能影響被監測系統的運行性能,不能人為的增加故障點;其次,要考慮在線監測裝置的測量精度,實作測量的目的,因此,本系統采用北京萊姆公司的LTSR新型ASIC倍訓電流傳感器,其體積小、電氣性能好,而且可以直接布置在PCB板上,分、合閘電磁線圈回路引線穿心而過,不會對斷路器主系統的正常運行造成影響,
高壓開關觸頭處于高電壓、高溫度、強磁場以及極強的電磁干擾環境中,要實作觸頭溫度測量就必須解決抗強電干擾、耐高溫、高壓隔離等技術問題,本系統采用文獻[1]介紹的方法,利用北京安伏電子有限公司的Nsmart8的測溫系統進行斷路器的觸頭溫度監測,有效的解決了斷路器觸頭溫度測量問題,
開斷電流的獲取通過電流互感器獲得,主要用來計算斷路器的電壽命,電壽命的計算方法采用文獻[2]中所提到的開斷電流與開斷次數的折演算法,能較好的考核斷路器的電壽命,誤差在15%以內,為工程應用所接受,
2.1 真空斷路器的作業原理
真空斷路器是利用真空作為觸頭間的絕緣與滅弧介質的斷路器,是高壓斷路器的一種,真空斷路器的基本結構主要由支架,真空滅弧室,導電回路,傳動機構,絕緣支撐,操動機構六部分構成,真空斷路器的傳動鏈一般由機構傳動連桿、拐臂、主軸、絕緣推桿、三角拐臂和觸頭彈簧裝置等構成,操動機構通過絕緣拉桿、觸頭彈簧等同真空滅弧室的動導電桿相連,帶動動導電桿運動完成合、分閘操作,
真空斷路器的合、分閘操作程序:
合閘 時 操 動機構合閘線圈得電→合閘鐵芯動作→機構及傳動連桿動作→開關主軸轉動→絕緣推桿前推→三角拐臂轉動→下壓觸頭彈簧裝置→滅弧室動導電桿向下運動使觸頭接觸→觸頭彈簧壓縮至接觸行程終點,與此同時,機構的輔助開關切斷合閘接觸器線圈電源,分閘彈簧拉長貯能,電磁機構的扣板由半軸扣車保持在合閘位置,合閘結束,
分閘時,機構中的分閘線圈得電→分閘鐵芯動作→扣板與半軸脫扣→斷路器在觸頭彈簧和分閘彈簧的作用下迅速分斷→機構的輔助開關切斷分閘線圈電源
→機構復原,并由分閘彈簧保持在分閘位置,
2.2 真空斷路器的機械特性引數定義
根據 《高 壓斷路器國家標準》,機械特性試驗中下列動作特性或整定值應予以記錄和計算:
(1)合閘時間;
(2) 分閘時間;
(3)一極中各單元之間的時間差:
(4) 極間時間差(如果進行多極試驗時);
(5 )操動裝置的恢復時間;
(6) 控制回路的損耗;
(7) 脫扣裝置的損耗,可能時還應記錄脫扣器的電流;
(8) 分閘或合閘指令的持續時間;
(9) 密封性(適用時):
(10) 氣體密度或壓力(適用時);
(11) 主回路電阻;
(12 ) 時間一行程特性曲線:
(13) 制造廠規定的其它重要特性或整定值;
其中 , 動觸頭的行程一時間曲線,分(合)閘線圈電流一時間波形,分(合)閘速度,分(合)閘時間,分(合)閘不同期性對斷路器開斷和關合各種電路影響最大,也是用戶和生產廠家最關心的幾個特性引數,斷路器機械部分的磨損、疲勞老化、生銹、閥的緩慢動作以及零件裝配不當等均會影響斷路器的機械特性,監測開關動作的行程一時間特性,提取各種機械特性引數并分析其變化可發現較多機械故障隱患,并可預測可能的故障部件,監測線圈電流波形的變化可以診斷出斷路器機械故障的趨勢,對斷路器中發生幾率危害最大的拒動、誤動故障的診斷尤為有效,
2.3 真空斷路器引數的確定方法
永磁機構真空斷路器的行程2時間特性是表征斷路器最重要的引數,也是計算斷路器分合閘速度的依據,能有效地反映斷路器的機械性能,其中,斷路器時間引數的確定是對行程特性及分合閘速度等其他引數進行分析計算的基礎,特別是分合閘操作起始和結束瞬間的確定,直接影響著真空斷路器機械參量的數值,故本系統首先要確定的是斷路器的剛分和關合時刻,剛分和關合時刻通過檢測分合閘線圈的電流變化并結合在斷口加輔助回路的狀態信號來獲得,即合閘時間是從合閘回路有電流開始到所有極觸頭都接觸的瞬間為止的時間間隔;分閘時間是從分閘回路有電流開始到所有極觸頭都分離瞬間為止的時間間隔,由于起始的依據是判斷分合閘線圈中有無電流通過,故線圈電流出現時刻的測定將直接影響測量的精度和系統穩定性,本系統特選用對信號反應非常迅速的霍爾傳感器對分合閘線圈通電的瞬間(以及控制電壓的變化)進行高速資料采集,可保證整個系統的測量精度和穩定性,同時,用來輔助確定分合閘時間的斷口狀態也是記錄和運算斷路器彈跳時間以及彈跳次數的依據,
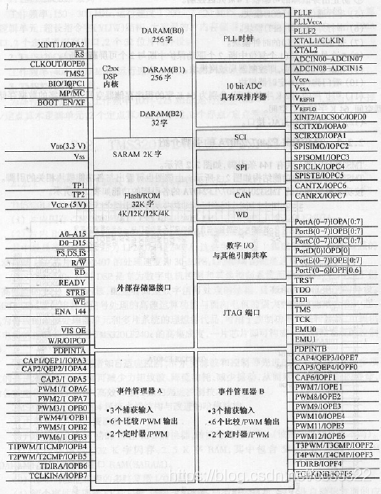
3 TMS320F2407簡介和功能結構圖
3.1 簡介
TMS320LF240x系列DSP是專為數字電機控制和其它控制系統而設計的,高性能的C2xx CPU內核,配置有高速數字信號處理的結構,且有單片電機控制的外設,
將高速運算功能與面向電機的強大控制功能結合在一起,成為傳統的多微處理器單元和多片系統的理想替代品,可用于控制功率開關轉換器,可提供多電機的控制等,由于LF240x的高集成度,一片芯片即構成一個控制器,
TMS LF240x采用諸如自適應控制、卡爾曼濾波和控制等先進的控制演算法,為各種電機提供了高速、高效和全變速的先進控制技術,
TMS320LF240x采用4級流水線結構與改進的哈佛結構,
片內外設及存盤器資源如下:
(1)雙8路或單16路的10位A/D轉換器,轉換時間為375ns(該指標視型號而不同),
(2)片記憶體儲器:32K字閃存、2.5K字RAM,其中包含544字的雙埠RAM(DARAM),2K字的單埠SARAM,
(3)41個可獨立編程的多路復用I/O引腳;
(4)兩個事件管理器EVA、EVB,適用于控制各種型別的電機,用于工業自動化,
(5)串行通信介面SCI模塊;
(6)串行外設介面SPI模塊;
(7)帶鎖相環PLL的時鐘模塊;
(8)5個外部中斷(復位中斷、兩個驅動保護中斷與兩個可屏蔽中斷);
(9)CAN 2.0B模塊,即控制器局域網模塊;
(10)看門狗(WD)定時器模塊;
(11)可擴展的192K字的空間,分別為64K字的程式存盤器空間、64K字的資料存盤器空間、64K字的I/O空間,
(12)用于仿真的JTAG介面,
3.2 功能結構圖
TMS320F2407的功能結構圖如圖3-1所示,
本測驗系統主要由上位機和下位機兩部分組成,可一次性快速完成永磁機構真空斷路器各機械特性引數的測驗,圖1 為測驗系統原理框圖,圖中,檢測模塊(傳感器)實作斷路器各狀態資訊(控制電壓、分合閘電流、行程及斷口狀態)的檢測,然后經信號調理模塊輸出至DSP進行A /D轉換,轉換后的數字量通過CAN總線上傳至PC機的顯示分析模塊,以完成各引數的計算分析及動態特性的顯示,其中本文只負責本系統的硬體設計,至于上位機的計算分析和動態特性顯示會在以后作進一步的設計,
-
- 測驗系統的硬體設計
整個測驗系統的硬體主要由各傳感器、信號采集調理電路、DSP和PC機組成,系統以DSP最小系統為核心,外圍擴展了檢測和通信電路,主要完成被測信號的采集和傳輸功能,
(這個圖要改2407的)
本測驗系統以TMS320LF2407 為核心,控制電壓測量采用VSM 500 霍爾磁平衡式電壓傳感器,回應時間< 40μs,線性度< 0. 4 % ,傳感器的輸入端通過引線直接和控制電壓兩端連接;分合閘線圈電流測量采用CSM 200 霍爾磁平衡式電流傳感器,回應時間< 1 μs,線性度< 0. 2 %,傳感器安裝于斷路器操動機構的分合閘操作回路中;動觸頭行程的檢測采用13FLP50導電塑料直線位移傳感器,預期壽命可達上百萬次,獨立線性為±(2. 0 %~3.0% ),解析度為無窮小,傳感器直接安裝于斷路器本體上;斷路器斷口狀態的檢測通過在斷口兩端加直流電壓,并于電路中串一限流電阻來實作,傳感器輸出的檢測信號經信號調理電路轉換成0~3 V電壓信號輸出至DSP的A /D模塊;斷口及其他開關狀態信號經信號調理及光電隔離后輸出至DSP的I/O模塊,
5 測驗系統的硬體設計
系統包括以下基本單元:
⑴ 信號的變送,信號的變送由相應的傳感器完成,傳感器從電氣設備上測量出反應斷路器運行狀態的物理量,并將非電信號轉換成電信號,傳送到裝置CPU處理單元,
⑵ 信號的調理,對傳感器變送過來的信號進行適當的調理,對混雜在信號中的噪聲進行抑制,提高信噪比,
⑶ 資料的采集,對經過調理后的信號進行采集、轉換和存盤,
⑷ 信號的傳輸,對采集到的信號傳送到裝置CPU處理單元,
⑸ 資料的處理,對采集到的資料進行處理和分析,例如數字濾波,時域分析,頻域分析,利用小波分析等等,目的是進一步提高信噪比,為診斷提供有效可靠的資料和資訊,
5.1 信號調理模塊
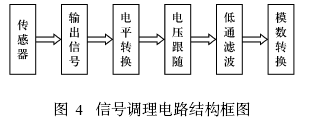
由于從傳感器直接輸出的信號往往存在干擾及信號不匹配等問題,故要進行高精度的信號調理,以完成信號的電平轉換、隔離以及低通濾波等功能,圖4為信號調理電路結構框圖,同時,為保證檢測并記錄的斷路器各機械特性引數的可靠性,避免電磁干擾引起元器件和設備的誤動作以及損壞,電磁兼容設計也是測驗系統的一個重要組成部分,
 (圖4可以畫好看點的)
(圖4可以畫好看點的)
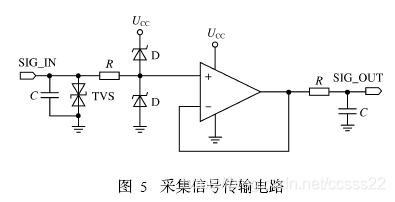
圖5為傳感器采集信號傳輸電路,主要采用TVS管和電容來抑制開關動作時產生的脈沖干擾,使用穩壓管以限制輸入電壓的幅度,通過隔離運算放大器電壓跟隨并經RC濾波以減小模擬與數字電路間的串擾,最終信號輸出至DSP的A /D模塊進行A /D轉換,
 (圖5,6可用protel改過來)
(圖5,6可用protel改過來)
圖6 為各開關狀態量的輸入電路,由TVS管、片狀濾波器、差分電阻、穩壓管和光電耦合器等組成,主要完成保護、整流濾波以及隔離等功能,最終信號輸出至DSP的I/O模塊,
同時,為有效地防止其他各種干擾,系統可采用軟體濾波及其他硬體抗干擾措施,具體措施有: ①用鋼或高導磁體制成的雙層封閉箱體作為外屏蔽層,有效抑制空間電磁波對電路板的干擾;②信號傳輸線采用同軸屏蔽線,防止長線傳輸中耦合的空間干擾影響DSP系統的正常作業; ③對印制電路板的關鍵部分進行接地,保證電路板內各路信號不會相互干擾; ④對于電源的直流輸出端使用大容量的電容進行低頻濾波,并在每個芯片的電源引腳附近增加旁路電容,去除電源上的高頻干擾,
-
- AD采樣模塊(要想字數就在這里做文章)
A/D 采樣是真空斷路器機械特性在線監測系統中最為關鍵的一部分,A/D采
樣的精度直接關系到監測系統整體的精度,本設計采用TMS320F2407自帶的16通道10位逐次逼近型高速A/D模塊,轉換速率達1 MsPs,它把多路開關、采樣保持器和A/D轉換器這三大環節集成在一個芯片中,可以減少分離元件的數目,縮小電路板的面積和提高系統的可靠性,
由于本設計需要采集的模擬信號量比較多,包括2路分、合閘線圈電流(ANS、ANg) ,三路主回路電流(AN10,ANll,AN12) ,三路主回路電壓(AN13,AN14,AN15)共8路模擬信號,因此采用該模塊特有的模擬輸入掃描模式,按順序掃描指定的模擬通道,為了盡可能提高系統的精度,本文設計的轉換速率為1 M卿,dsp時鐘頻率Fosc為30MHZ,A/D時鐘周期配置為83.33ns,采樣時間配置為2 TAD,5V正參考電壓由精密基準源LM36完成(如圖3.10所示),負參考電壓接地,采用順序自動采樣和自動轉換,每完成8路通道的掃描就自動轉換,將轉換結果按順序存入ADCBUFO-ADCBUF7緩沖器里,并產生中斷.
-
- CAN通信模塊(要想字數就在這里做文章)
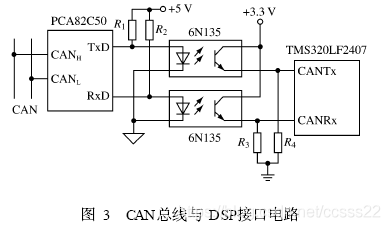
采用CAN現場總線技術進行資料通信,確保了實時性和可靠性,TMS320LF2407 本身內嵌CAN通信模塊,使得構建CAN 節點網路的電路簡單、容易,圖3為CAN總線與DSP介面電路,為提高測驗系統可靠性, 在TMS320LF2407 和PCA82C50間加入了光電耦合器6N135進行電氣隔離,
 (可改好看點)
(可改好看點)
-
- 電源模塊
由于監測裝置下位機單片機作業頻率比較快,達30MHz,而且電路部分既有模擬的又有數字的,所以為了提高裝置作業的穩定性和可靠性,分別為數字電路和模擬電路設計線性電源,
如圖3.13 所示,供數字電路用的線性直流電源采用三端集成穩壓器LMll7T.5.0實作,LMll7T.5.0是一款高精度,輸出可調節的三端穩壓器,負載電流可達800mA.線性電源作業程序如下:220V交流市電經220V/gV的小變壓器降為gv 交流電壓,經過整流橋整流,變為一個直流脈動信號,采用大容量的電解電容進行濾波,以減小輸出電壓紋波.但由于電解電容器在高頻下作業存在電感特性,對于來自電源側的高頻干擾不能抑制,因此在整流電路后加入頻率特性好的陶瓷高頻電容,進一步改善紋波,另外為了改善負載端的瞬態回應,抑制瞬態噪聲千擾,在電源輸出端加了擔電容,在穩壓塊上增加了散熱器,以防止啥訓穩壓塊,加二極管起保護作用,這樣就可以得到穩定的+5V輸出電壓,供數字電路使用,
 (圖13,14可用protel畫)
(圖13,14可用protel畫)
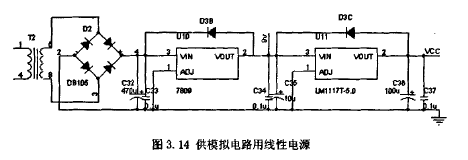
如圖 3.14所示,供模擬電路用的線性電源設計與供數字電路用的線性電源類似,輸出直流電由三端集成穩壓器7809和LMlll7T一5.0組成的串聯型直流穩壓電源提供,使用220V/5V的小變壓器降壓,
轉載請註明出處,本文鏈接:https://www.uj5u.com/shujuku/139846.html
標籤:其他