首先說一下我的整體思路:
① 首先定義了一個識別器型別,封裝了計算邊長,識別形狀和展示結果三個函式,
② 主函式先讀入圖片,然后將圖片轉化為灰度圖片,然后高斯濾波平滑處理,然后將灰度圖片轉化為黑白兩色圖片,
③ 呼叫函式識別圖片中所有的輪廓,然后串列形式回傳圖片,輪廓等資訊,然后只取輪廓的所有點資訊(每個點的資訊為平面坐標)作為一個串列程式(第91,92,93行代碼)
④ 用之前創建的識別器實體對每個輪廓中的點進行多邊形擬合,得到頂點的坐標的串列中去(class中28~32行代碼)
⑤ 輸出識別結果
以下是代碼部分:
import cv2
import math
THRESHOLE_VALUE=60
COEFFICIENT=0.02
class ShapeDetector:
#初始化類
def __init__(self):
#字典型別對應每一種圖形的計數器
self.counter = {"unrecognized image": 0, "triangle": 0, "rhombus": 0, "rectangle": 0, "pentagon": 0,
"hexagon": 0, "circle": 0}
#初始化圖形型別為不可識別
self.shape = "unrecognized image"
#圖形頂點集置空
self.approx = []
#初始化該圖形的周長為0
self.peri = 0
# 計算歐式距離(主要作用通過計算邊長區分菱形和長方形)
def distance(self, x1, y1, x2, y2):
return math.sqrt((x2 - x1) ** 2 + (y2 - y1) ** 2)
def detect(self, c):
#cv2.arcLength函式回傳周長
self.peri = cv2.arcLength(c, True)
#cv2.approxPolyDP用多邊形取擬合,回傳的是頂點的串列
self.approx = cv2.approxPolyDP(c, COEFFICIENT * self.peri, True)
#3個頂點,三角形
if len(self.approx) == 3:
self.shape = "triangle"
#同理,四個頂點,四邊形
elif len(self.approx) == 4:
#計算相鄰兩邊的長度,做差判在誤差范圍內是否相等
dist1 = self.distance(self.approx[0][0][0], self.approx[0][0][1], self.approx[1][0][0],
self.approx[1][0][1])
dist2 = self.distance(self.approx[0][0][0], self.approx[0][0][1], self.approx[3][0][0],
self.approx[3][0][1])
result = math.fabs(dist1 - dist2)
# print(result)
#誤差小于10,可近似認為相等,為菱形
if result <= 10:
self.shape = "rhombus"
else:
self.shape = "rectangle"
#五邊形
elif len(self.approx) == 5:
self.shape = "pentagon"
#六邊形
elif len(self.approx) == 6:
self.shape = "hexagon"
#圓
else:
self.shape = "circle"
#相應形狀計數器加一
self.counter[self.shape] += 1
#回傳形狀
return self.shape
def Display(self):
#展現結果
for kind in self.counter.keys():
print("The number of {} is {}".format(kind, self.counter[kind]))
def main():
#讀入圖片
testID = "test.png"
image = cv2.imread(testID)
#將圖片轉換為灰度圖片
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 高斯濾波,影像平滑處理
blurred = cv2.GaussianBlur(gray, (5, 5), 0)
#根據閾值,將灰度圖片轉化為黑白兩色圖片
thresh = cv2.threshold(blurred, THRESHOLE_VALUE, 255, cv2.THRESH_BINARY_INV)[1]
#回傳圖片和圖中輪廓資訊,串列形式回傳到cnts中
cnts = cv2.findContours(thresh.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
#只需要取輪廓上點的資訊
cnts = cnts[1]
#創建一個識別器實體
sd = ShapeDetector()
#分別對每個輪廓進行處理
for c in cnts:
#得到形狀
shape = sd.detect(c)
#print(shape)
#輸出結果
sd.Display()
if __name__=="__main__":
main()以下為本程式用到的函式表:
(第9行)init(self) (類初始化函式)
(第23行)distance(self, x1, y1, x2, y2): (計算(x1,y1),(x2,y2)兩點之間的距離,點為像素坐標)
(第24行)math.sqrt() (數學開平方運算)
(第26行)detect(self, c): (判斷輪廓的形狀)
(第28行)cv2.arcLength()(計算周長函式,一引數c是輪廓的點集;二引數true代表閉合,false代表開放,)
鏈接:https://blog.csdn.net/u011854789/article/details/79836242
(第31行) cv2.approxPolyDP()(多邊形擬合函式,
一引數c是輪廓的點集;
二引數代表圖形邊長允許的偏差范圍,因為圖片中的圖形邊長上是凹凸不平的,但是電腦是根據標準的直線來進行邊的擬合,所以難免每個點處都有和標準直線偏差的距離,此引數便是設定最大偏差距離不能超過多少,不然就會用一個新的邊擬合,此處設定的是邊長的百分之二;
三引數為true指示擬合的多邊閉合,false為開放, 回傳值為擬合出來的所有圖形頂點坐標,用串列表示)
鏈接:https://blog.csdn.net/brooknew/article/details/103512228
(有好幾行) len()(計算可迭代物件的長度)
(第71行)Display(self)(輸出結果)
(第74行) print()(通過標準輸出流將緩沖區資訊輸出到控制臺(str.format的用法自己查))
(第79行) cv2.imread()(讀入圖片,
一引數圖片路徑;
二引數加載形式,可預設)
鏈接:https://blog.csdn.net/lccrun/article/details/95594268
(第83行) cv2.cvtColor(轉換顏色空間函式,
一引數為原圖片;
二引數為轉換的方法,常見的轉化方法見鏈接)
鏈接:https://blog.csdn.net/m0_37192554/article/details/81946430
(第85行) cv2.GaussianBlur()(高斯濾波函式,影像平滑處理,
一引數是源圖片;
二引數是高斯矩陣的大小;
三引數表示標準差,此函式用用就行不用搞懂具體干啥,如果感興趣可以看下面的鏈接)
鏈接:https://blog.csdn.net/weixin_44657197/article/details/102679434
(第87行) cv2.threshold()(影像閾值處理函式,
一引數為源圖片;
二引數為閾值;
三引數為設定顏色的最大RGB值;
四引數為劃分的方法,
此函式的目的是為了將圖片轉化為黑白二色圖,根據常識,顏色深的是黑色,顏色淺的是白色對吧,那么如何定義顏色的深淺呢?先補充一下:
***RGB:***計算機中常用的表示顏色的方法,計算機上每一個像素點都是三個顏色不同比例得到的,由一個元組來表示(R,G,B),分別代表紅色,綠色和藍色,
主流的劃分是每個位置劃分為256個段位,用0~255的整數表示,比如(255,255,255)就是最白的白色,(0,0,0)就是最黑的黑色,(255,0,0)就是最亮的紅色,
***灰度:***前面的cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)就是將RGB彩色圖片轉換為灰度圖片,具體的轉換公式不用管,但是灰度為50的圖片RGB值為(50,50,50)這個知道就行了,
第二引數閾值:對圖片的每個像素點,根據RGB值計算其灰度,如果灰度大于這個閾值,那么就變成黑色(或者白色),小于等于就變成白色(或者黑色),
第三引數最大RGB值:就是把灰度變成255,說白了就是白色 第四引數劃分方法:見下圖
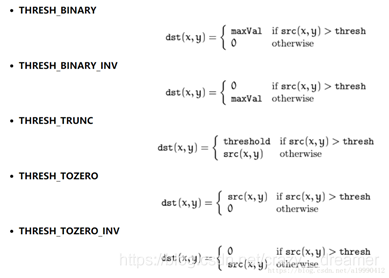 dst(x,y)是(x,y)處像素之后的灰度,src(x,y)是源圖片在(x,y)坐標像素的灰度)
dst(x,y)是(x,y)處像素之后的灰度,src(x,y)是源圖片在(x,y)坐標像素的灰度)
鏈接:https://blog.csdn.net/a19990412/article/details/81172426
(第90行) cv2.findContours()(尋找圖片中的所有輪廓,
一引數為帶輪廓的圖片;
二引數為找到的輪廓的輸出形式;
三引數為指定輪廓的近似方法,回傳值的話只需要取串列中的第二個,即可獲得所有輪廓的所有點坐標,詳細見鏈接)
鏈接:https://blog.csdn.net/u014120499/article/details/99675967
備注:
1、在使用cv2.threshold()函式時,第四個引數劃分方法,當背景為白色時要用cv2.THRESH_BINARY_INV但是背景為黑色是要去掉_INV,用cv2.THRESH_BINARY,其他背景顏色自己想一想吧,,,,,,
2、要是統計的個數出現了問題的話,這是精度的問題,比如我當前設定下,圓的邊數是8,改變精度只需要調整全域變數COEFFICIENT的大小就行
祝學習愉快~
評價(涂紅):* * * * *
轉載請註明出處,本文鏈接:https://www.uj5u.com/shujuku/161692.html
標籤:其他
上一篇:視頻中的車牌特征識別