背景:兩個天線分別坐落在兩個山頭上(或者其他什么地方均可,中間要保證無阻礙物),它們的波束角度都很小,大概為一度,且相距很遠(幾十公里),無法直接用望遠鏡觀察位置來手動調整,因此需要通過計算調整各自的方位和仰角,兩個點的經緯度和海拔均為已知條件,
首先,地球并不是完美的球體,它更接近一個兩極比赤道更扁的橢球,查閱資料可得,赤道半徑約為6378137米,而極半徑約為6356752米,中間大概相差了22000米,因此其造成的誤差已經無法忽略,對于這種情況,即使兩個點的海拔一樣高,在實際空間上也會有一定的高度差,會需要仰角的小幅度偏移,
我的思路:
第一步,將經緯度和海拔轉化成常用的笛卡爾坐標(xyz),這樣計算起來比較熟悉和方便,通過對橢球中任意一個子午面的分析可得出換算公式:
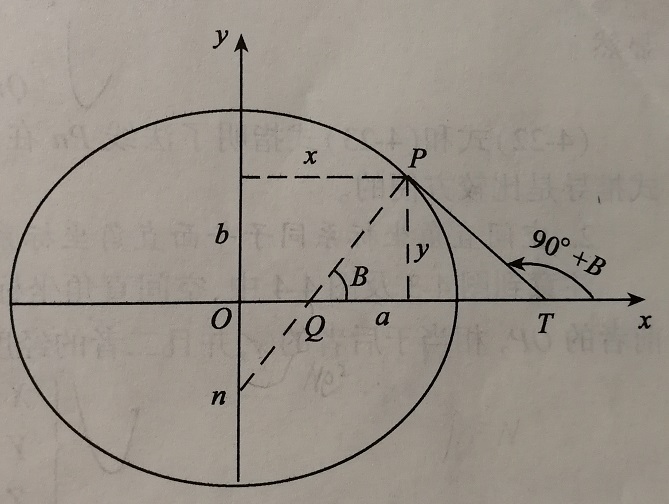
圖中的y對應笛卡爾坐標系內P點的z軸,x是坐標系內P點投影向量在(x,y)與原點之間連接的線段,原理類似于球體極坐標轉換成直角坐標系,根據勾股定理等可推出:
P(x) = ( N + 海拔 ) .* cos( 緯度) .* cos( 經度)
P(y) = ( N + 海拔 ) .* cos( 緯度) .* sin( 經度 )
P(z)= ( ( 1.0 - e2) .* N + 海拔 ) .* sin( 緯度 )
其中e2 = (a^2-b^2)/(a^2)
W ^2 =(1.0-e2*((sin(緯度))^2)) (這是一個常用的輔助函式,了解即可)
N = a/W;
根據這樣的思路即可給出代碼:
clear;
clc;
%%
%從橢球坐標(經緯度和海拔)轉化成笛卡爾坐標
plh = [30.76,104.08,503.67;
30.58,104.08,503.67]; %隨便給兩個點的坐標,分別對應緯度經度和海拔
lat = plh(:,1)*pi/180; %latitude
lon = plh(:,2)*pi/180; %longitude
hgt = plh(:,3); %altitude
a = 6378137.0;
b = 6356752.3;
if abs(lat) > pi/2 | abs(lon) > 2*pi
warning( 'In plh2xyz(), the input latitude and/or longitude may not be in units of radians.' );
end
e2 = (a^2-b^2)/(a^2);
W = sqrt(1.0-e2*((sin(lat)).^2));
N = a./W;
pos(:,1) = ( N + hgt ) .* cos( lat ) .* cos( lon ); %x
pos(:,2) = ( N + hgt ) .* cos( lat ) .* sin( lon ); %y
pos(:,3) = ( ( 1.0 - e2 ) .* N + hgt ) .* sin( lat ); %z
Raim=sqrt(pos(:,1).^2+pos(:,2).^2+pos(:,3).^2);
pos
這樣得到的pos就是一個2x3的矩陣,包含了兩個點的xyz坐標,
第二步,分別計算各自的仰角:
仰角很容易理解,如果是P0對P1點的仰角,可以看成是向量P0P1和P0點對應的橢球切面的夾角,那么只要計算出平面的法向量和向量P0P1的夾角,再用90°減去它即可,然后P1對P0的仰角同理,
根據這個思路,可以寫出如下代碼:
%%
%求任意一點P0(x0,y0,z0)對于點P1(x1,y1,z1)的仰角w1
%過P0點的切平面:x0*x/a^2+y0*y/a^2+z0*z/b^2-1=0
%過P0P1的直線:(x-x0)/(x1-x0)=(y-y0)/(y1-y0)=(z-z0)/(z1-z0)
x0=pos(1,1);y0=pos(1,2);z0=pos(1,3);
x1=pos(2,1);y1=pos(2,2);z1=pos(2,3);
upmn=(x1-x0)*x0/a^2+(y1-y0)*y0/a^2+(z1-z0)*z0/b^2;
downmn=sqrt(((x1-x0).^2+(y1-y0).^2+(z1-z0).^2)*((x0^2+y0^2)/a^4+z0^2/b^4));
if pos(1,3)>=pos(2,3)
w1=90-acosd(upmn/downmn);
else
w1=acosd(upmn/downmn)-90;
end
w1
需要注意的是,因為在P0和P1兩個點上,它們各自的切面斜率不同,因此兩個點的仰角絕對值有細微差別,并且因為方向一定是相反的(一個向上一個向下),所以得到的數值一個是正數一個是負數(要么就都是0),
第三步,計算各自的方向角(如:北偏東45°):
思路可參考:https://blog.csdn.net/u014531567/article/details/70767732?utm_medium=distribute.pc_relevant.none-task-blog-blogcommendfrommachinelearnpai2-1.edu_weight&depth_1-utm_source=distribute.pc_relevant.none-task-blog-blogcommendfrommachinelearnpai2-1.edu_weight,只要求出這個二面角即可,
根據這個思路,可以寫出下列代碼:
%%
%調整方向角度w2
P1OC=acosd(abs(z1)/sqrt(x1^2+y1^2+z1^2));
EOF=plh(2,2)-plh(1,2);
P0OP1=acosd((x0*x1+y0*y1+z0*z1)/sqrt((x0^2+y0^2+z0^2)*(x1^2+y1^2+z1^2)));
C0P0P1=asind(sind(P1OC)*sind(EOF)/sind(P0OP1));
w2=abs(C0P0P1);
if plh(2,1)>=plh(1,1) & plh(2,2)>=plh(1,2)
ww=char('The azimuth is from North to East,degree is', num2str(w2));
elseif plh(2,1)>=plh(1,1) & plh(2,2)<plh(1,2)
ww=char('The azimuth is from North to West,degree is', num2str(w2));
elseif plh(2,1)<plh(1,1) & plh(2,2)<plh(1,2)
ww=char('The azimuth is from South to West,degree is', num2str(w2));
else
ww=char('The azimuth is from South to East,degree is', num2str(w2));
end
w2 %方位角w2
ww %列印指導:從南(北)向東(西)轉向這樣之后,天線的水平轉向角即可確定,至此,天線的波束理論上即可相互連接,只需要在之后做一些較準即可,
附上運行結果:
以兩個點P0(30.76,104.08,1503.67)和P1(30.58,104.04,503.67)舉例(分別是緯度,經度和海拔):
結果如下:
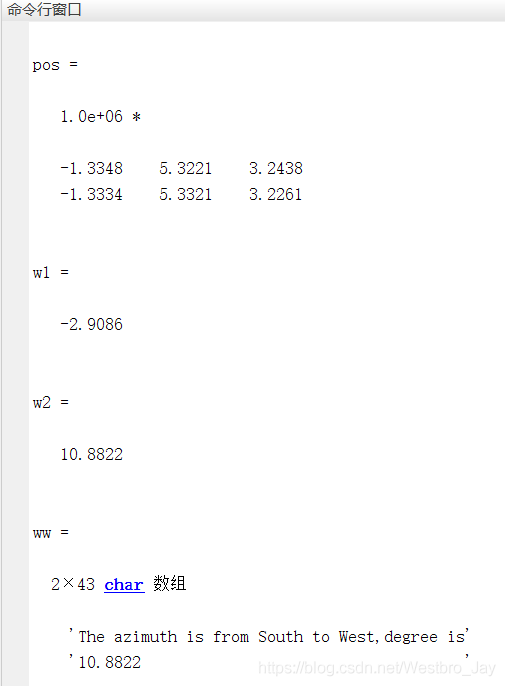
如圖所示,P0對P1的仰角為w1=-2.9086°,P0對P1的方位角為S to W,w2=10.8822°,驗證成功,
轉載請註明出處,本文鏈接:https://www.uj5u.com/shujuku/20268.html
標籤:其他