我知道從影像中進行 3D 點估計的三角測量原理。
我知道從影像中進行 3D 點估計的三角測量原理。但是,您將如何解決以下問題,我有來自 3D 空間中的一條線的影像,具有已知的相機位置和已知的校準。但是由于我不知道在 eag 影像中看到了多少/哪一段線,我不確定如何形成線估計的方程。查看圖片(我有超過 2 張圖片可用,在所有圖片中,可見線的大部分應該相同,但不完全相同):
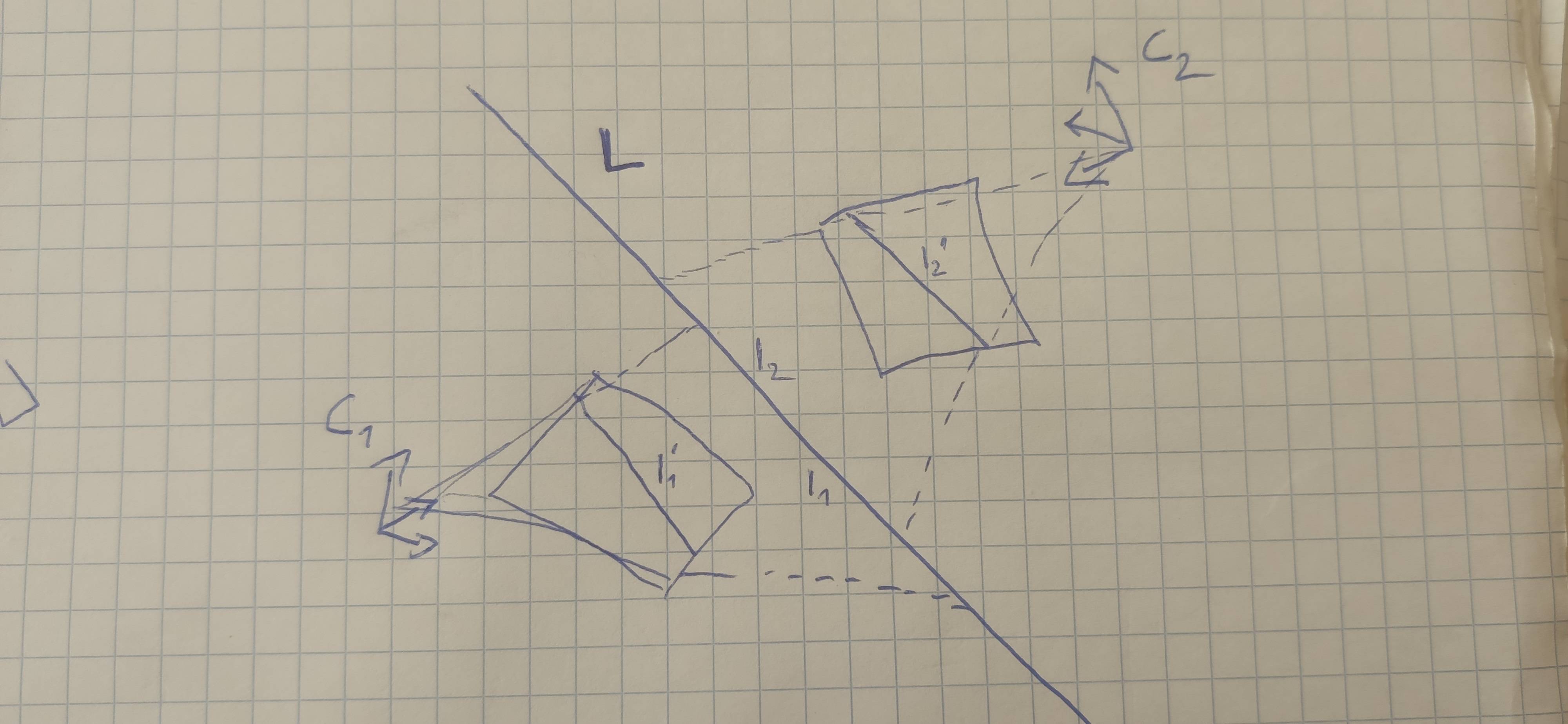
我正在考慮通過影像中的線從相機跨越一個平面并與從每個角度跨越的所有平面相交以獲得對線的估計?但是,我真的不知道這是否可能或如何做到這一點。
謝謝你的幫助。干杯
uj5u.com熱心網友回復:
平面可以定義為一個點和一個方向。如果機器人攝像機已校準并且位置已知,則...制作兩個平面,首先從第一個攝像機開始,以相同的方式使用眼睛和投影線第二個平面。螢屏上的線條可以輕松轉換為空間線條,因為您有相機位置。剩下什么與這兩個平面相交。
uj5u.com熱心網友回復:
害怕其他答案和評論會倒退,雙關語。
將影像線反向投影(“三角剖分”)到 3D 空間,然后嘗試將它們與一些特別的啟發式方法結合在一起,這對于初始近似可能是有益的。
但是,為了改進這種近似,您應該假設存在具有未知引數(一個點和一個單位向量)的 3D 線,以及標識沿您觀察的線段的線的初始點和最終點的附加標量引數。然后,您可以使用投影方程設定一個優化問題,其目標是找到一組引數,以最小化具有這些引數的 3D 線在影像上的投影誤差。這本質上是捆綁調整,但是用您的問題的語言表達,實際上您可以使用任何好的捆綁調整軟體包(提示:Ceres)來解決它。使用一些特殊啟發式計算的初始近似值將用作捆綁調整的起點。
轉載請註明出處,本文鏈接:https://www.uj5u.com/gongcheng/421576.html
標籤:
上一篇:使用opencv訪問掩碼的像素值