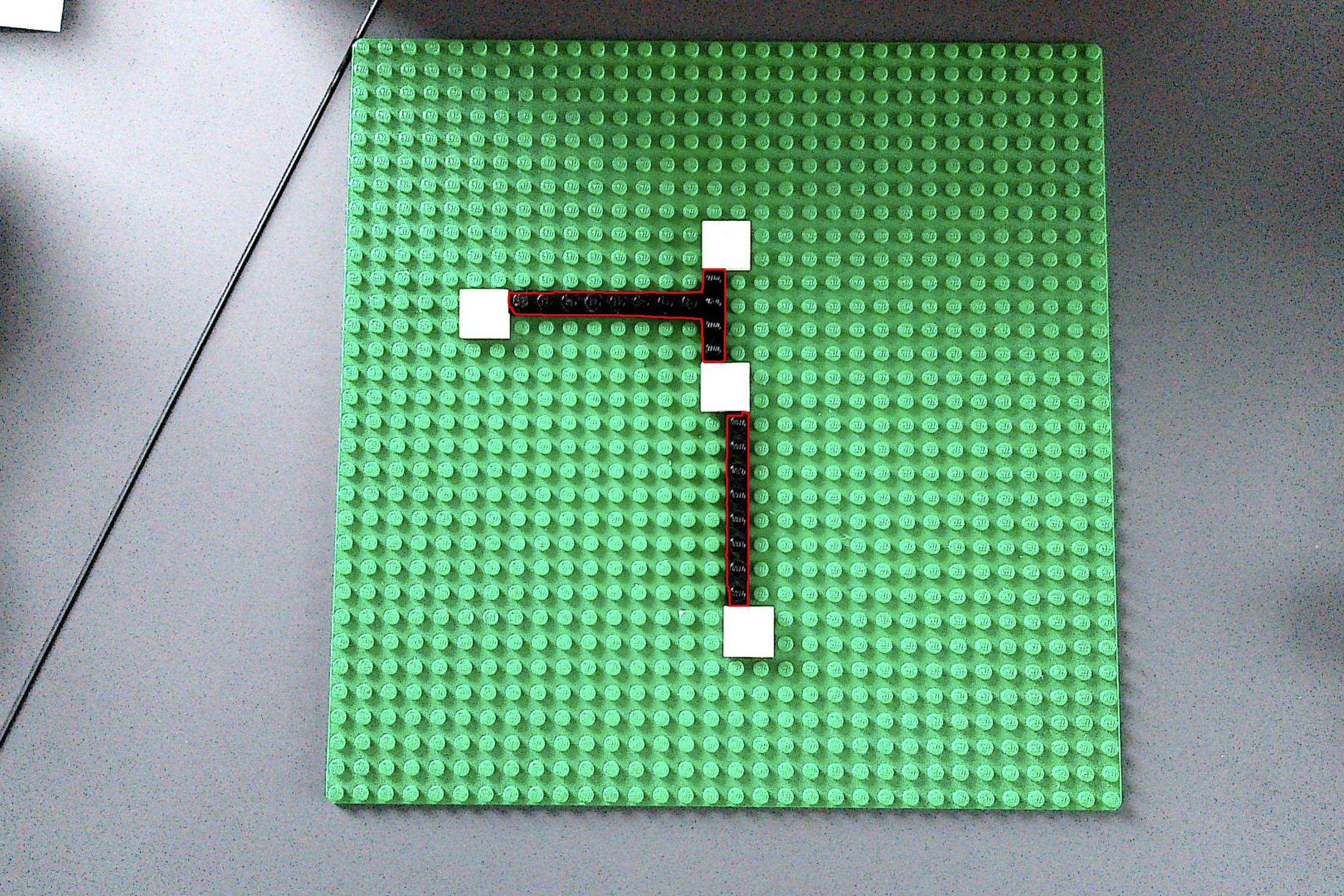
我有下面的樂高板影像,上面有一些磚塊

現在我正在嘗試用 OpenCV 檢測粗黑線(連接白色方塊)。我已經對 HoughLinesP 進行了很多實驗,之前將影像轉換為灰色或黑白,應用了模糊,...... 沒有任何東西導致可用的結果。
# Read image
img = cv2.imread('image.jpg', cv2.IMREAD_GRAYSCALE)
# Resize Image
img = cv2.resize(img, (0,0), fx=0.25, fy=0.25)
# Initialize output
out = cv2.cvtColor(img, cv2.COLOR_GRAY2BGR)
# Median blurring to get rid of the noise; invert image
img = cv2.medianBlur(img, 5)
# Adaptive Treshold
bw = cv2.adaptiveThreshold(img,255,cv2.ADAPTIVE_THRESH_GAUSSIAN_C,\
cv2.THRESH_BINARY,15,8)
# HoughLinesP
linesP = cv2.HoughLinesP(bw, 500, np.pi / 180, 50, None, 50, 10)
# Draw Lines
if linesP is not None:
for i in range(0, len(linesP)):
l = linesP[i][0]
cv2.line(out, (l[0], l[1]), (l[2], l[3]), (0,0,255), 3, cv2.LINE_AA)
自適應閾值讓您可以很好地看到邊緣,但使用 HoughLinesP 您無法從中獲得任何有用的資訊
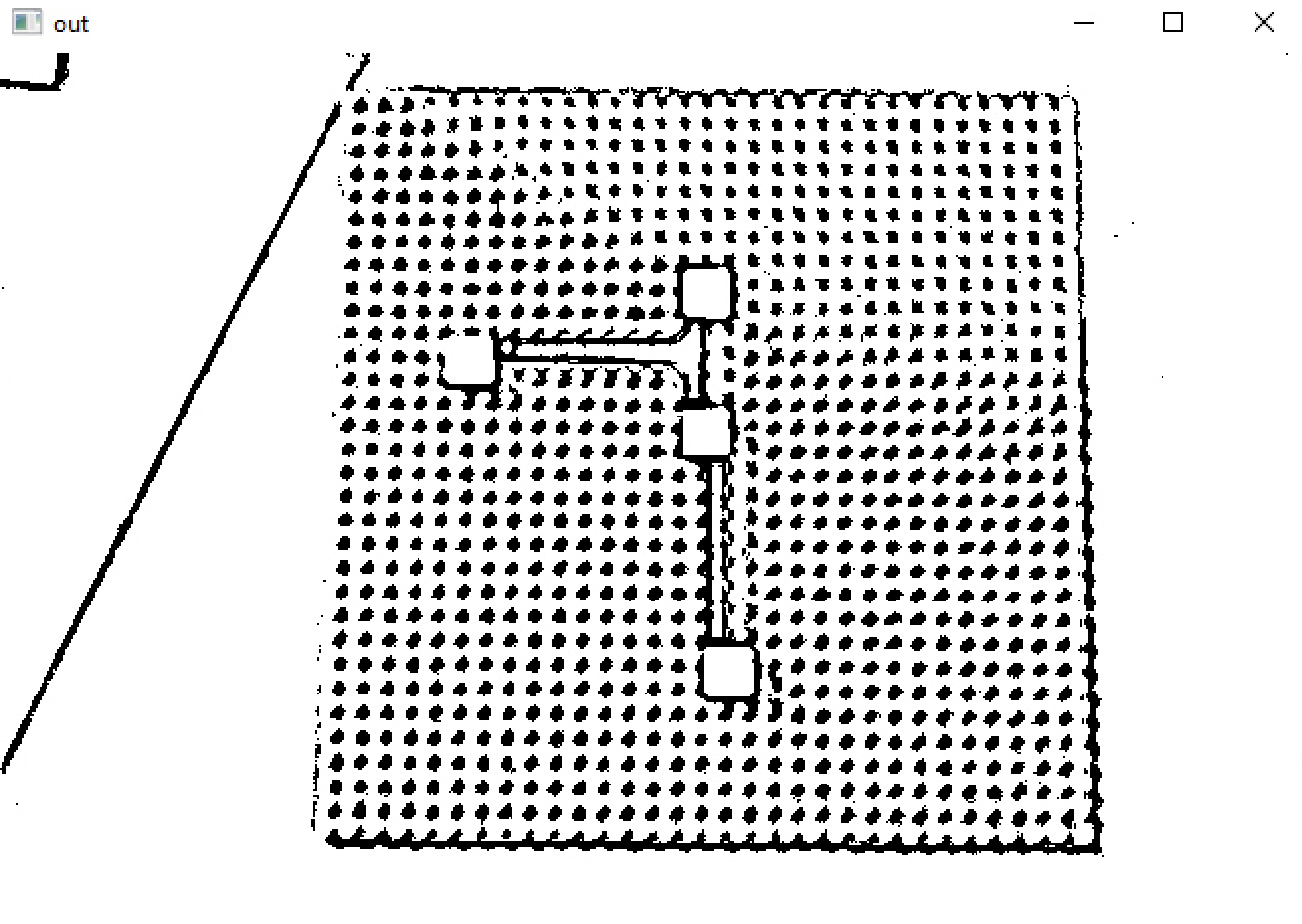

我究竟做錯了什么?
感謝@fmw42 和@jeru-luke 為您解決這個問題提供了很好的解決方案!我喜歡隔離/掩蓋綠板,所以我將兩者結合起來:
import cv2
import numpy as np
img = cv2.imread("image.jpg")
scale_percent = 50 # percent of original size
width = int(img.shape[1] * scale_percent / 100)
height = int(img.shape[0] * scale_percent / 100)
dim = (width, height)
# resize image
img = cv2.resize(img, dim, interpolation = cv2.INTER_AREA)
lab = cv2.cvtColor(img, cv2.COLOR_BGR2LAB)
a_component = lab[:,:,1]
# binary threshold the a-channel
th = cv2.threshold(a_component,127,255,cv2.THRESH_BINARY_INV cv2.THRESH_OTSU)[1]
# numpy black
black = np.zeros((img.shape[0],img.shape[1]),np.uint8)
# function to obtain the largest contour in given image after filling it
def get_region(image):
contours, hierarchy = cv2.findContours(image, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
c = max(contours, key = cv2.contourArea)
mask = cv2.drawContours(black,[c],0,255, -1)
return mask
mask = get_region(th)
# turning the region outside the green block white
green_block = cv2.bitwise_and(img, img, mask = mask)
green_block[black==0]=(255,255,255)
# median blur
median = cv2.medianBlur(green_block, 5)
# threshold on black
lower = (0,0,0)
upper = (15,15,15)
thresh = cv2.inRange(median, lower, upper)
# apply morphology open and close
kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (3,3))
morph = cv2.morphologyEx(thresh, cv2.MORPH_OPEN, kernel)
kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (29,29))
morph = cv2.morphologyEx(morph, cv2.MORPH_CLOSE, kernel)
# filter contours on area
contours = cv2.findContours(morph, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
contours = contours[0] if len(contours) == 2 else contours[1]
result = green_block.copy()
for c in contours:
area = cv2.contourArea(c)
if area > 1000:
cv2.drawContours(result, [c], -1, (0, 0, 255), 2)
# view result
cv2.imshow("result", result)
cv2.waitKey(0)
cv2.destroyAllWindows()
uj5u.com熱心網友回復:
在這里,我提出了一種使用顏色的重復分割方法。這個答案基于LAB 顏色空間的使用
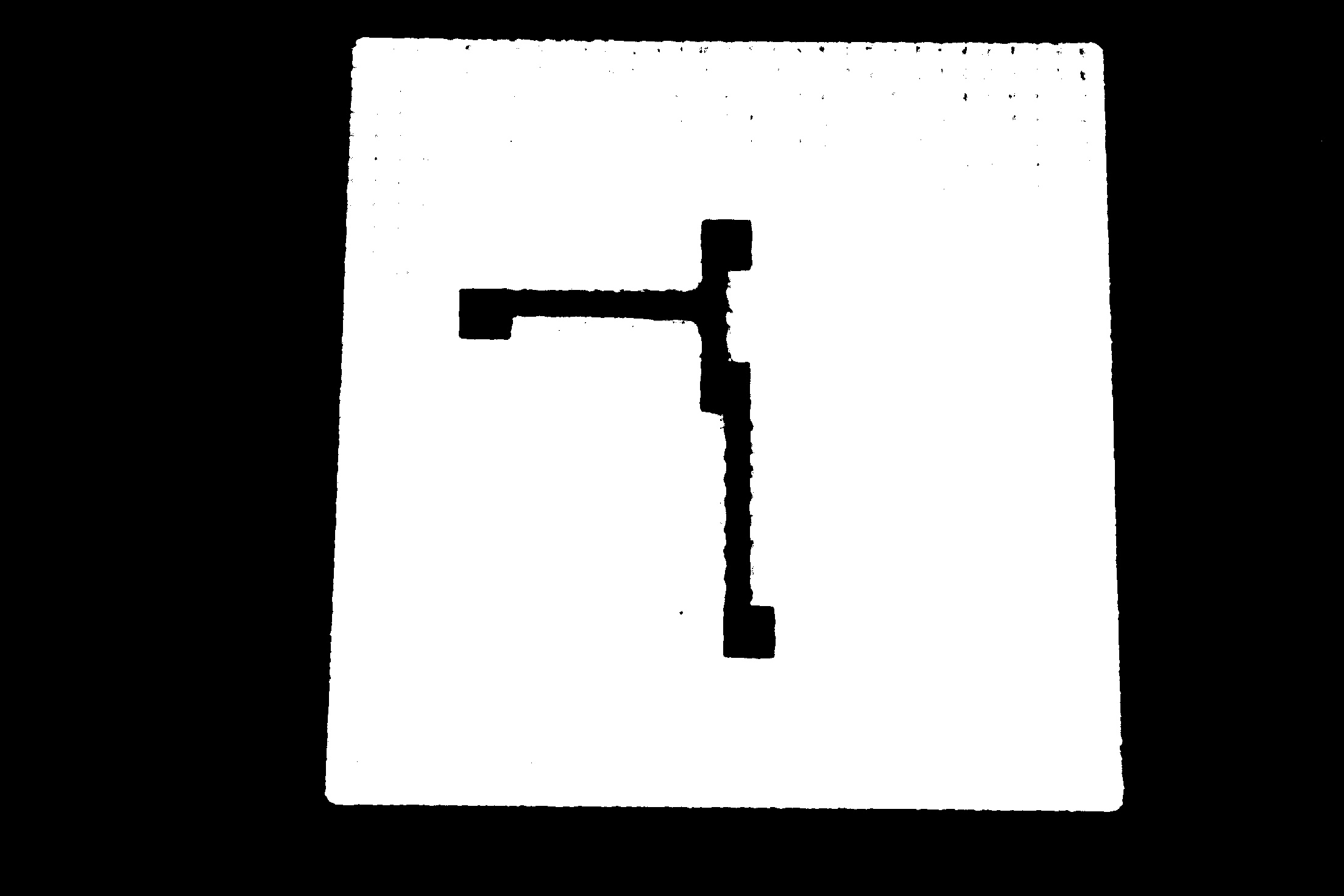
1. 隔離綠色樂高積木
img = cv2.imread(image_path)
lab = cv2.cvtColor(img, cv2.COLOR_BGR2LAB)
a_component = lab[:,:,1]
# binary threshold the a-channel
th = cv2.threshold(a_component,127,255,cv2.THRESH_BINARY_INV cv2.THRESH_OTSU)[1]
th
# function to obtain the largest contour in given image after filling it
def get_region(image):
contours, hierarchy = cv2.findContours(image, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
c = max(contours, key = cv2.contourArea)
black = np.zeros((image.shape[0], image.shape[1]), np.uint8)
mask = cv2.drawContours(black,[c],0,255, -1)
return mask
mask = get_region(th)
mask
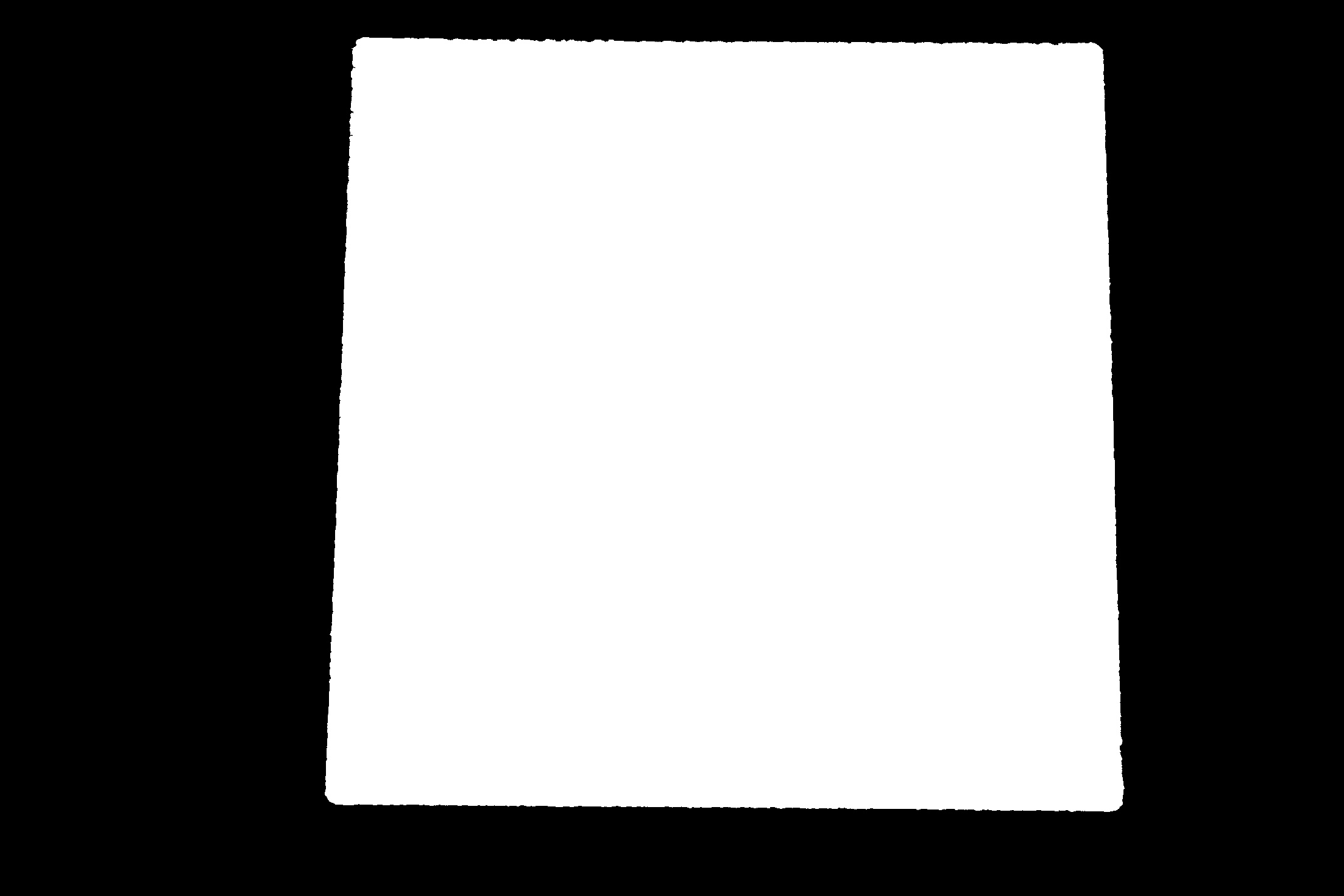
# turning the region outside the green block white
green_block = cv2.bitwise_and(img, img, mask = mask)
green_block[black==0]=(255,255,255)
green_block

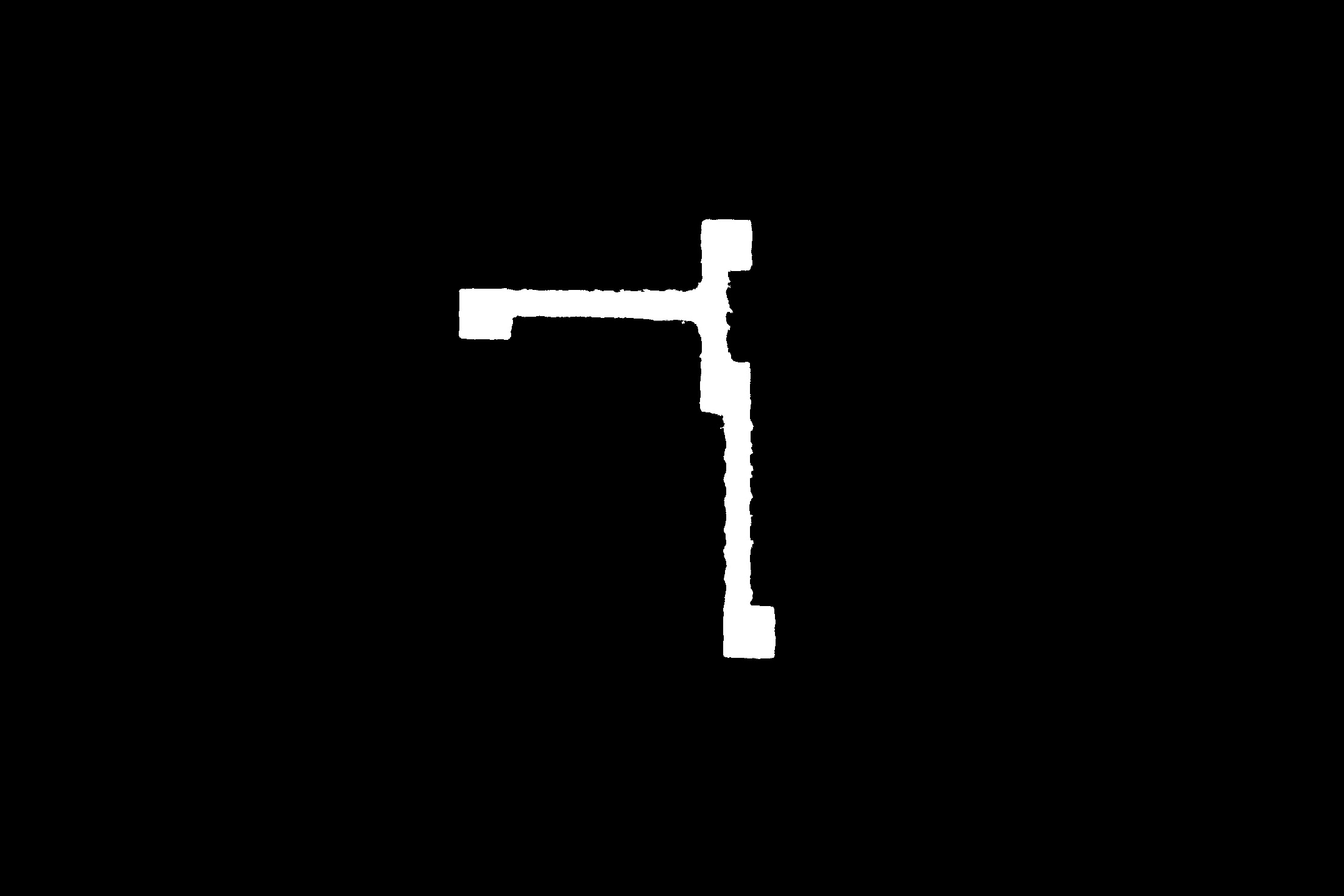
2. 分割道路
- 為了獲得道路的大致區域,我減去了
mask和th。
cv2.subtract()執行算術減法,其中cv2將處理負值。
road = cv2.subtract(mask,th)
# `road` contains some unwanted spots/contours which are removed using the function "get_region"
only_road = get_region(road)
only_road
僅用原始影像掩蓋路段給出
road_colored = cv2.bitwise_and(img, img, mask = only_road)
road_colored[only_road==0]=(255,255,255)
road_colored
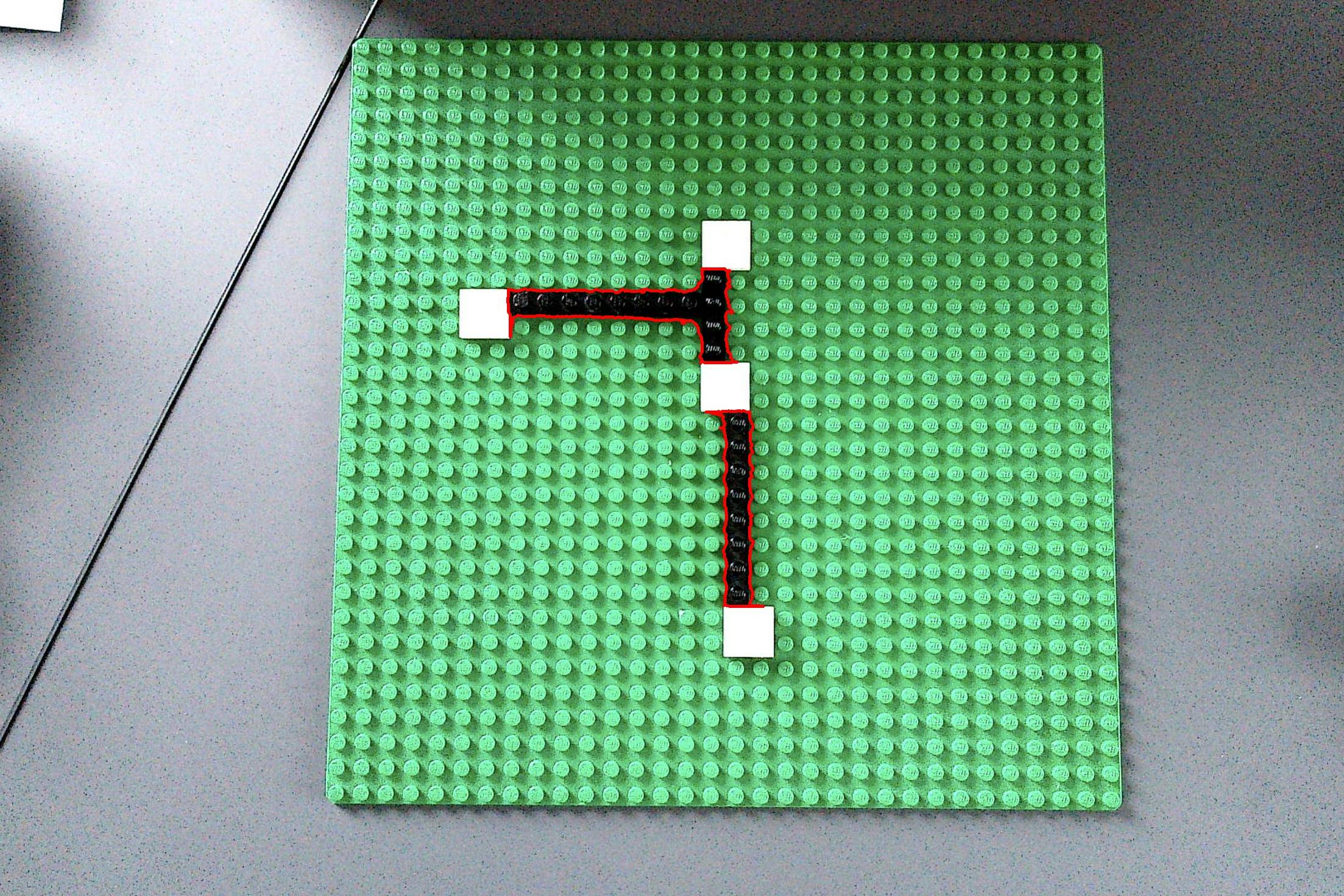
從上圖中只有黑色區域(道路)存在,很容易分割:
# converting to grayscale and applying threshold
th2 = cv2.threshold(road_colored[:,:,1],127,255,cv2.THRESH_BINARY_INV cv2.THRESH_OTSU)[1]
# using portion of the code from fmw42's answer, to get contours above certain area
contours = cv2.findContours(th2, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
contours = contours[0] if len(contours) == 2 else contours[1]
result = img.copy()
for c in contours:
area = cv2.contourArea(c)
if area > 1000:
cv2.drawContours(result, [c], -1, (0, 0, 255), 4)
result
注意:
要清理最終結果,您可以th2在繪制輪廓之前應用形態學操作。
uj5u.com熱心網友回復:
這是在 Python/OpenCV 中執行此操作的一種方法。
- 閱讀圖片
- 應用中值模糊
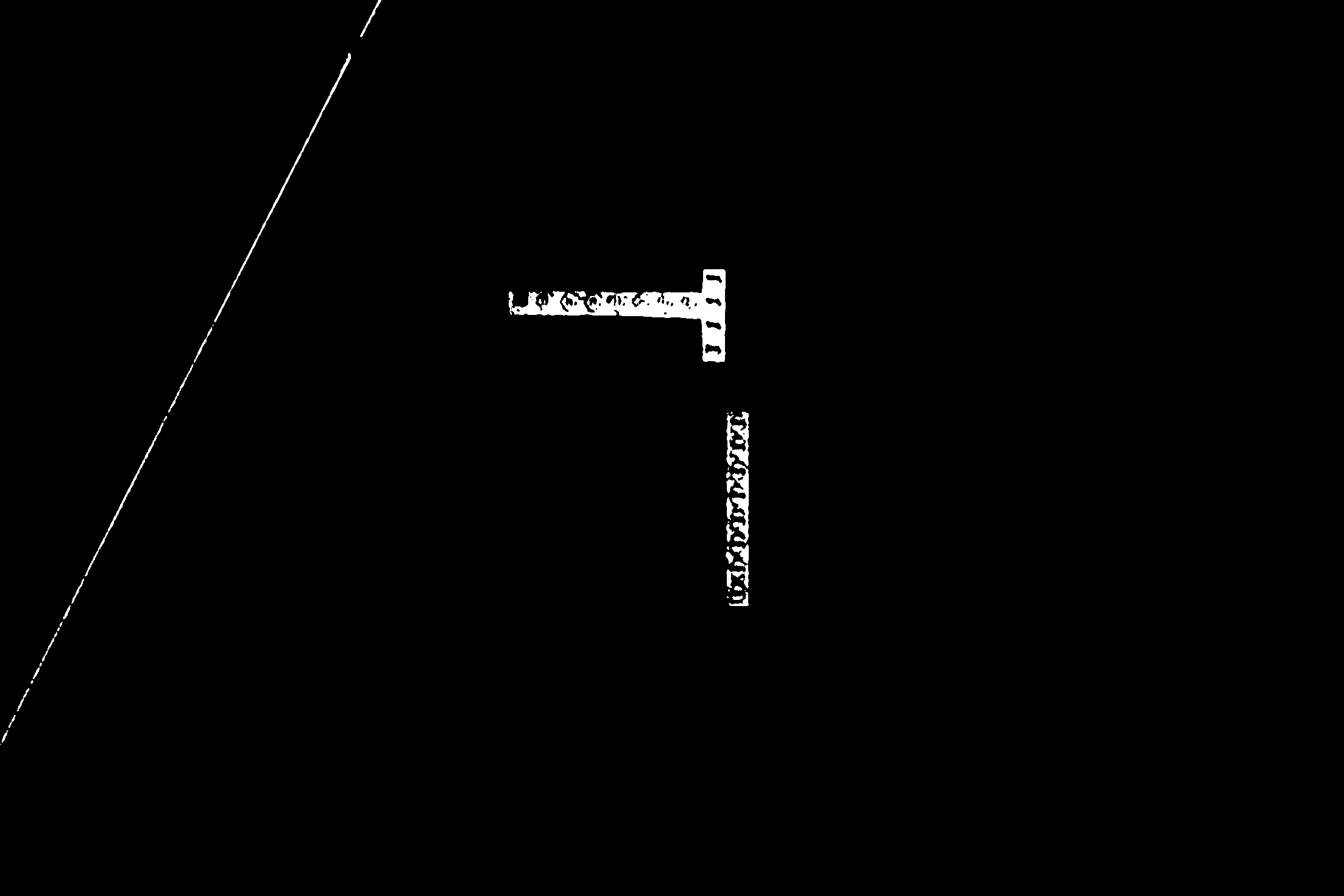
- 使用 cv2.inRange() 的黑色閾值
- 應用形態來清理它
- 獲取輪廓并過濾區域
- 在輸入上繪制輪廓
- 保存結果
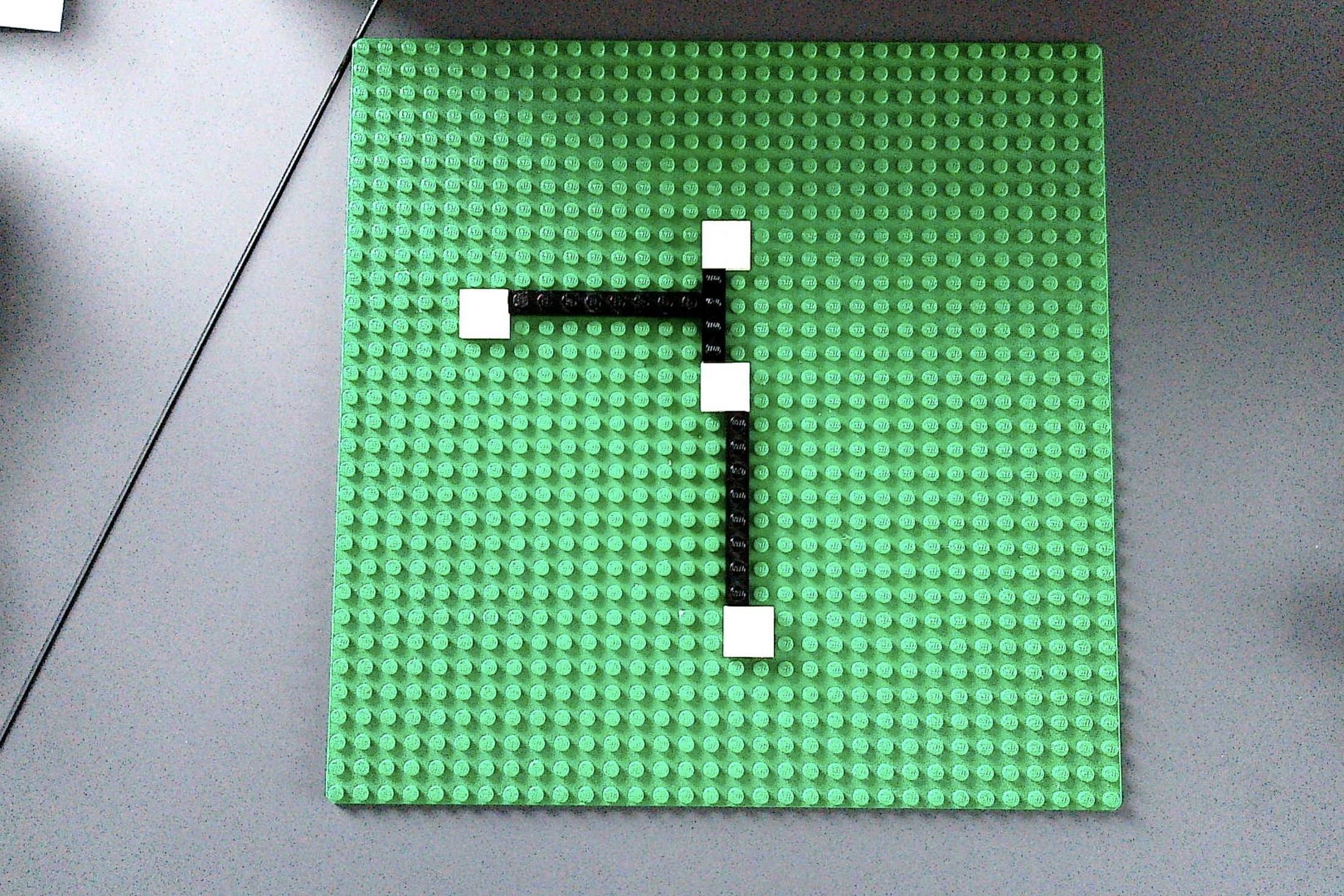
輸入:
import cv2
import numpy as np
# read image
img = cv2.imread('black_lines.jpg')
# median blur
median = cv2.medianBlur(img, 5)
# threshold on black
lower = (0,0,0)
upper = (15,15,15)
thresh = cv2.inRange(median, lower, upper)
# apply morphology open and close
kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (3,3))
morph = cv2.morphologyEx(thresh, cv2.MORPH_OPEN, kernel)
kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (29,29))
morph = cv2.morphologyEx(morph, cv2.MORPH_CLOSE, kernel)
# filter contours on area
contours = cv2.findContours(morph, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
contours = contours[0] if len(contours) == 2 else contours[1]
result = img.copy()
for c in contours:
area = cv2.contourArea(c)
if area > 1000:
cv2.drawContours(result, [c], -1, (0, 0, 255), 2)
# save result
cv2.imwrite("black_lines_threshold.jpg", thresh)
cv2.imwrite("black_lines_morphology.jpg", morph)
cv2.imwrite("black_lines_result.jpg", result)
# view result
cv2.imshow("threshold", thresh)
cv2.imshow("morphology", morph)
cv2.imshow("result", result)
cv2.waitKey(0)
cv2.destroyAllWindows()
閾值影像:
形態影像:
結果:
轉載請註明出處,本文鏈接:https://www.uj5u.com/gongcheng/461991.html
標籤:Python opencv 计算机视觉 houghlinesp