臺達EH3與臺達伺服通訊簡要說明
測驗程序中發現資料讀取的有誤,后面檢查出來的結果,自己焊接的RS485線有問題。
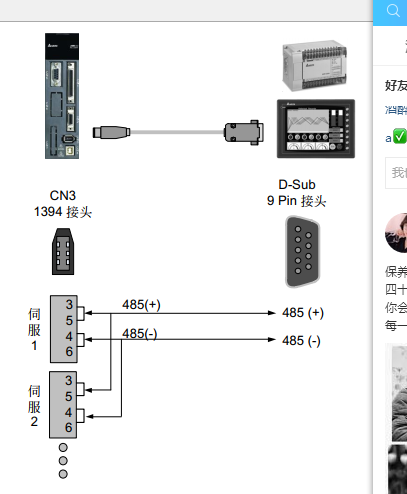
必須焊接如下圖,35短接、46短接。
1.P3-00 設定為2 //地址為2
P3-01 0033波特率38400
P3-02 0011通信協議1:7,E,1(MODBUS,ASCII)
P3-05 0000 RS485標準MODBUS 通訊。
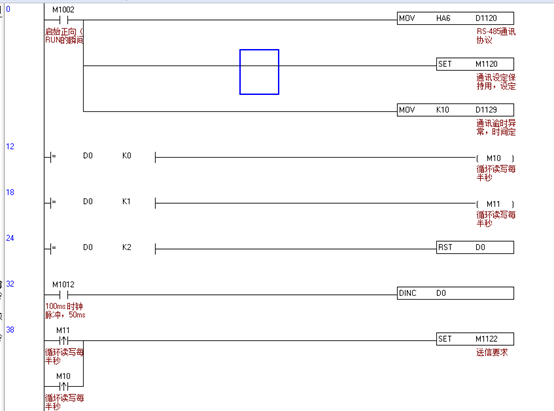
設定完上面的資料,現在就可以初步寫PLC程式。
2.P4-05 通訊地址040AH (測驗用)
控制方式為1-5000:為寸動的速度
/4998:CCW方向寸動
/4999:CW方向寸動運行
/0;停止運行。
通過對臺達伺服驅動器 P4—05的讀寫可以使伺服電機實作的簡單測驗,發0伺服電機停止,發1-4997之內的數字就是設定伺服電機的速度,發4998電機CCW轉,發4999電機CW轉。發0電機停止。
測驗完上面的的資料,現在就可以讓伺服讀取當前的位置。
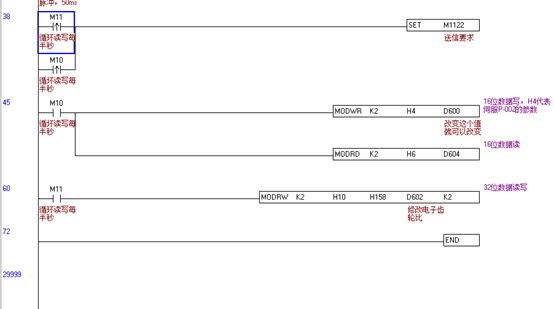
簡單說明:H4和H6是可以改變的,D600之類的數值是設定的,比如咱們讀P-002里面的電壓,參考伺服說明書,應該設定為14,則為主電路電壓。那么MODWR K2 H4 K14,伺服驅動器面板上顯示的數字就為主回路電壓了。
3.重點來了,咱們現在開始通過485,讓臺達伺服A2動作起來需要的引數如下
簡單流程就是通過P5-07的引數控制伺服運動,運動的方式按照PR模式下進行。
P0-02 設定為00,顯示回傳的脈沖數
P1-01 設定為1,為PR模式。
P6-00 原點回歸定義 比如設定0,就當于回歸完成后,停止,需要設定減速時間之類的,查看手冊即可。具體原點回歸設定P5-04,設定P5-04 為 108,具體意義是遇到極限時,方向反轉,回傳找Z相,直接定義原點以目前為止當做原點。
P6-01 原點定義值 ,這個看個人習慣,我這邊設定為0
P6-02 定義屬性,比如我設定的為1,則為定速控制,然后給5-17發1,回按照P6-02的模式做定速控制,速度按P6-03里面的引數運行
P6-03 按照P6-02前面設定為1,則這邊的速度設定為2000,然后給5-17發1,回按照P6-02的模式做定速控制,速度按P6-03里面的2000速度運行
P6-04 定義屬性,為2,做定位控制
P6-05 設定為10000(伺服運行的最終位置點,代表伺服反饋的脈沖數).說明。如果P5-07發2,那么PR程式會執行,P6-04和P6-05里面的程式執行,伺服會做定位運動,一直運動到10000這個位置點。
P6-06到P7-27的引數,同理上面的設定。
設定完上面的資料,現在進行編碼器絕對位置的選擇。
P2-69 設定為1,目的是斷電后,編碼器的位置會記憶,再次斷電后,上一次的位置會重新計算,顯示在面板上。
P0-49 設定為1,設定完后,會將當前面板的編碼器數值記憶到P-52中,說明一下,臺達的提供的是P0-50到P0-52,比如我這邊當前的面板數值為800,那么就會把數值寫到P0-52中。
P2-70 設定為1,將讀取的數值單位設定為脈波,通俗點應該是脈沖數
P5-07 通過寫入0,開始原點回歸(P6-00和P6-01的程式)。
//寫入1-63,開始執行指定的PR程式,相當于D1+CTRG+POSN(通過設定P6-00到P7-27里面的引數即可讓程式按照引數運行)
寫入1000,執行停止命令,相當于DI:STOP
P5-07 通過寫入0,開始原點回歸(P6-00和P6-01的程式)。
//寫入1-63,開始執行指定的PR程式,相當于D1+CTRG+POSN(通過設定P6-00到P7-27里面的引數即可讓程式按照引數運行)
寫入1000,執行停止命令,相當于DI:STOP
P5-07 通過寫入1,開始執行(P6-02和P6-03的程式)。停止的時候直接給P5-07發1000就可以。
P5-07 通過寫入2,開始執行(P6-04和P6-05的程式)。
定速控制停止的時候發1000.定位控制可以設定,位置到后停止和位置到后執行下一個功能,這個大家可以參考ASDA-A2系列的應用手冊。其他手冊個人只是參考,最終參考來自ASDA-A2系列的手冊。
注意事項:
1.每次更新完P0-49里面的資料,必須回歸原點一次,這樣才能執行,PR定位程式.
2.定位程式里面的資料是回傳的面板數,比如你發10000,伺服就會從其他位置回傳到10000這個位置,并在面板上顯示。如果需要其他功能,請參考臺達ASDA-A2系列應用手冊。
3.這個程式可以先手動設定面板的資料驗證一下,然后進行PLC轉化就可以。
4.也可以用觸摸屏進行控制,個人建議用MODBUS RTU 模式進行控制。
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/133158.html
標籤:設計模式
上一篇:Matlab
下一篇:人工智能和大資料文章