文章目錄
- HC-05學習筆記
- 一、HC-05的基本硬體介紹
- 二、作業原理
- 三、使用方法
- 一、硬體連接
- 二、軟體控制
- 1.第一個片段
- 2.第二個片段
- 四、具體應用
- 一.資訊的傳送
- 二.手機操縱單片機
- 五、注意事項
- 一、AT狀態
- 1.第一種方法
- 2.第二種方法
- 二、連接方式
- 三、代碼
- 六、總結
- 寫在最后
HC-05學習筆記
HC-05是一款不需要了解藍牙通訊知識 便能應用在單片機上的模塊,此文章將大概敘述如何應用HC-05實作手機控制單片機
以下是本篇文章正文內容
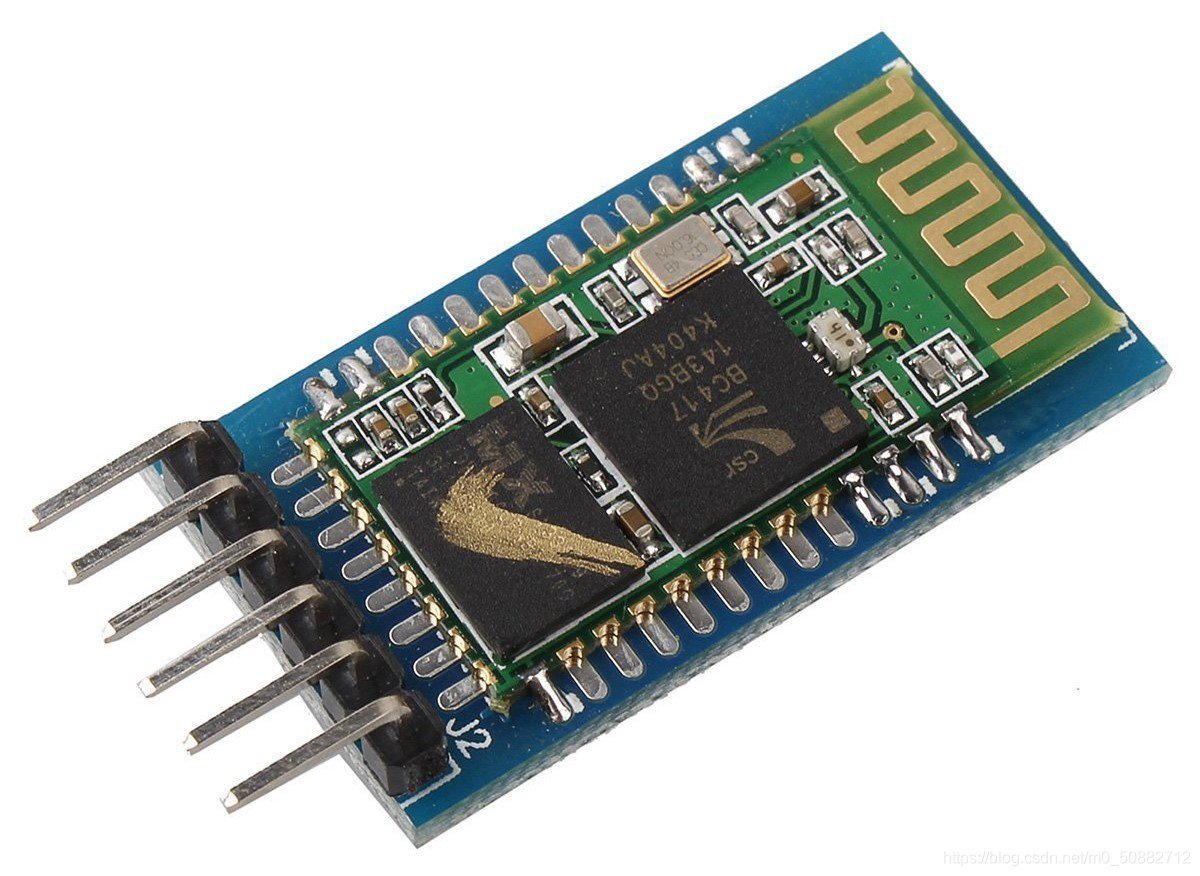
一、HC-05的基本硬體介紹
HC-05共有六個引腳,分別為VCC、GND、Tx、Rx、LED和KEY,
LED : 藍牙連接狀態指示,快閃表示沒有藍牙連接,慢閃表示進入AT模式,雙閃表示藍牙已連接并打開了埠
KEY : 用于進入AT除錯狀態:高電平有效(懸空默認為低電平),在應用中,該引腳應該受單片機的引腳控制,當單片機的引腳有上拉電阻式,可以直接接KEY引腳,如果沒有,就要像VCC引腳一樣,通過一個三極管間接控制
Rx : 與單片機的Tx引腳相連,
Tx :與單片機的Rx引腳相連,
VCC接5V GND接地,
二、作業原理
純屬本小白個人理解
HC-05作為一個模塊,將他與單片機相連之后單片機就變成了一個擁有藍牙功能的機器,它可以將藍牙收發資料的復雜完全隱蔽,轉化為較為簡單的串口通信,通過單片機與它的串口通信,使得我們的單片機看起來擁有了藍牙通訊功能,實際使用中我們完全不必了解復雜的藍牙協議,只需要了解如何與該模塊進行串口通信即可,
三、使用方法
一、硬體連接
這里VCC、GND連接到相應IO口即可
Rx選擇連接PA2
Tx選擇連接PA3
KEY選擇連接PC4
LED選擇連接PA4
二、軟體控制
1.第一個片段
PA2與PA3對應的是串口2的發送埠與接收埠
因此我們采用串口2進行資料的發送與接收
這里我給出白嫖的代碼片段
void u2_printf(char* fmt,...)
{
va_list ap;
va_start(ap,fmt);
vsprintf((char*)USART2_TX_BUF,fmt,ap);
va_end(ap);
while(DMA_GetCurrDataCounter(DMA1_Channel7)!=0);
UART_DMA_Enable(DMA1_Channel7,strlen((const char*)USART2_TX_BUF)); //通過DMA發送
}
va_list為一種引數形式 追根溯源,其型別還是char
va_start()函式可以找到fmt這個字串中對應ap所代表的多個引數的地址,
va_end()函式為清空ap這個引數串列
這里有兩個知識點
1.vsprintf()函式的使用
vsprintf()函式:將可變引數串列的格式化資料寫入字串
舉例:int vsprintf (char * s, const char * format, va_list arg );
對于這個陳述句,其作用為 運用va_list型別的指標arg將format所代表的一堆不確定長度以及型別的字串加載到大字串s中,
同時可以拓展一下sprintf()函式,這兩個函式的應用類似
sprintf()函式:將一個格式化的字串輸出到一個目的字串中,他與vsprintf()的區別就是前者的入口引數可以多個,但是后者只有三個,
2.DMA通訊:DMA直接翻譯過來為direct memory access就是直接記憶傳輸,不需要cpu的處理,直接用DMA模塊傳輸到另一個存盤器上,具體的使用方法可以參考網上的視頻,其實質就是一個串口通信,但其具有不占用cpu的優點,降低了cpu的作業壓力,提升cpu幸福指數,
這里為什么要采用va_等等有關宏的運算,本小白也有一點自己的理解
從u2_printf()這個函式的入口引數可以看到,入口引數的最后部分是個沒有確定個數的引數(省略號代表了可以輸入多個引數),為了達到這個目的,我們需要用到va_list型別的指標,再運用va_start()宏以及vsprintf()函式來確定引數的長度,從而使得我們的函式可以有一個不確定數量的引數入口,
對于這樣的 入口引數不限制個數的 函式,大部分都是使用va_list 、va_start 、va_end來達成這種效果,
這樣做的好處當然非常明顯,對于單片機的使用程序中,傳輸的資料結構將變得更加多元,不必確定引數型別,可以讓我們的串口直接發出類似Vanilla.044這種混合型別的字串,
2.第二個片段
void TIM4_IRQHandler(void)
{
if (TIM_GetITStatus(TIM4, TIM_IT_Update) != RESET)
{
USART2_RX_STA|=1<<15;
TIM_ClearITPendingBit(TIM4, TIM_IT_Update );
TIM4_Set(0);
}
}
在整個程序中還運用一個定時器4來進行定時器中斷
其作用就是不斷判斷串口2發送的資料有沒有結束,他說一個時間,10ms,沒有再次接收到資料就默認資料傳輸完成了,
四、具體應用
一.資訊的傳送
這里我以單片機發送資料到手機舉例
給出以下主函式片段
if(sendmask)
{
sprintf((char*)sendbuf,"ALIENTEK HC05 %d\r\n",sendcnt);
LCD_ShowString(30+40,160,200,16,16,sendbuf);
u2_printf("ALIENTEK HC05 %d\r\n",sendcnt);
sendcnt++;
if(sendcnt>99)sendcnt=0;
}
此處sendmask為一個判斷是發出訊息還是暫停發訊息的引數,當其值非零時進入該片段函式,
sprintf()函式將要發送的資料sendcnt替換綠色代碼里的%d然后存盤在char型別的字串sendbuf中
LCD顯示函式顯示sendbuf,u2_printf函式將資料通過串口2發送給藍牙模塊從而使資料到達手機,
這里的資料是從電腦通過串口連接發送給的單片機,實際使用中可以直接運用單片機相連的模塊所產生的資料,來達到手機與機器互傳資料的目的,
二.手機操縱單片機
這里給出一段代碼
reclen=USART2_RX_STA&0X7FFF;
USART2_RX_BUF[reclen]=0;
if(reclen==9||reclen==8)
{
if(strcmp((const char*)USART2_RX_BUF,"+LED1 ON")==0)LED1=0;
if(strcmp((const char*)USART2_RX_BUF,"+LED1 OFF")==0)LED1=1;
}
這里reclen為判斷接受到的資料長度,如果長度等于9或者等于8,則再進行判斷是否為+LED ON或者+LED OFF,從而控制LED的亮與滅,
實際應用中,可以控制任何你想控制但是前提是你會控制的IO口或者模塊,
五、注意事項
一、AT狀態
AT狀態可以查詢我們的設備名稱設備狀態等等資訊,可以通過AT指令的發送與接收情況判斷我們的藍牙連接是否成功,
對于HC-05有兩種方式進入AT狀態:
1.第一種方法
上電同時或者上電之前將KEY接VCC,上電后,模塊就進入AT模式,
2.第二種方法
上電之前KEY并沒有連接VCC,模塊上電之后再將key連接VCC,此時就進入了AT模式,
沒有將KEY連接到VCC上之前是連接模式,
OS:第一種方法進入的AT模式波特率為38400,而第二種方法進入的AT模式波特率與通信波特率一致,
二、連接方式
HC-05模塊須使用TTL信號,所以應適當添加USB轉TTL模塊,
三、代碼
對于不同的開發板,應該注意介面的數量,我這里使用的為正點原子的STM32mini板,介面相對充足,而C8T6這種小板子,則需要根據IO口數量合理選擇串口以及定時器的使用,尤其是還需要LCD或者OLED 螢屏顯示的時候更應該好好分配,
六、總結
在學習HC-05的程序讓我更多的了解了一部分有關mini板的知識,
對于PA9、PA10這兩個引腳,之所以在這兩個引腳上加跳線帽,是因為Rx與Tx連接到板載的CH340G芯片,并且PA9、PA10對應芯片的串口1,通過串口1的作用,才使得我們的mini板子可以用USB燒錄程式,
其次還了解了vsprintf()、va_list、va_start()、va_end的大致作用,并大致了解了如何寫出入口引數不限制個數的函式,
藍牙模塊的可用性還是很高的,對外設與單片機互通提供了更多可能,
寫在最后
本人小白一枚,這些僅僅是我個人的經驗與認知,也許含有多處錯誤,希望讀者給我指正,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/136051.html
標籤:其他