硬體中的看門狗,不是門衛的意思,而是一只很兇的狗!如果你不按時喂它,它就會讓系統重啟!這反而是我們想要的功能,
看門狗功能:CPU在執行軟體時對跑飛的一種恢復方式,
1、看門狗概述
防止系統跑飛(軟體顛覆)
看門狗可用于受到電氣噪音、電源故障、靜電放電等影響(造成軟體運行進入死回圈,或者死掉)的應用,或需要高可靠性的環境,
看門狗定時器(WDT,Watch Dog Timer)是單片機的一個組成部分,它實際上是一個計數器,一般給看門狗一個數字,程式開始運行后看門狗開始倒計數,
- 運行正常情況:
如果程式運行正常,過一段時間CPU應發出指令讓看門狗復位(喂狗指令:程式陳述句是分散地放在單片機其他控制陳述句中間的),重新開始倒計數, - 運行例外情況:
一旦單片機由于干擾造成程式跑飛后而陷入某一程式段進入死回圈狀態時,寫看門狗引腳的程式便不能被執行,這個時候,看門狗電路就會由于得不到單片機送來的信號,便在它和單片機復位引腳相連的引腳上送出一個復位信號,使單片機發生復位,即程式從程式存盤器的起始位置開始執行,這樣便實作了單片機的自動復位,
如果看門狗減到0就認為程式沒有正常作業,強制整個系統復位,因此可以用看門狗防止程式在跑飛的時候回不到正常模式,相當于網路中的TTL(TIME TO LIFE就是能夠活多久,防止一個包在網路中長時間亂竄)
2、看門狗模式(向系統發送RESET,不會產生中斷)
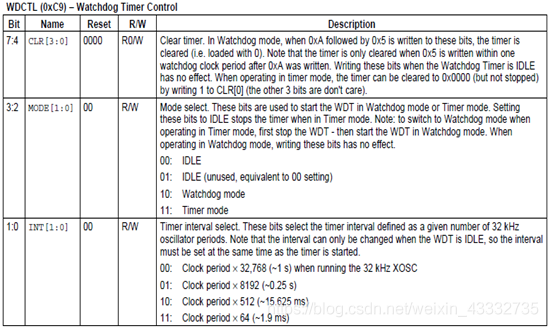
WDT 可以配置為一個看門狗定時器或一個通用的定時器,WDT 模塊的運行由WDCTL 暫存器控制, 當系統重啟后看門狗定時器失能,
WDT 運行在一個頻率為32.768 kHz(當使用32 kHz XOSC時)的看門狗定時器時鐘上,這個時鐘頻率的超時期限等于1.9ms,15.625 ms,0.25 s 和1s,分別對應64,512,8192 和32768 的計數值設定,
當計數器達到設定的計數值時,看門狗會對系統產生一個reset信號,如果在計數器到達設定值之前執行了看門狗clear序列,counter的值會被重置為0,并會繼續遞增,看門狗的clear序列包含:writing 0xA to WDCTL.CLR[3:0], followed by writing 0x5 to the same register bits within one watchdog clock period. 如果這個完整序列不能在watch dog時期結束前完成,看門狗就會產生一個系統reset信號,
3、定時器模式(產生中斷信號)
To start the WDT in timer mode, the WDCTL.MODE[1:0] bits must be set to 11. The timer is started and the counter starts incrementing from 0. When the counter reaches the selected interval value, the timer produces an interrupt request (IRCON2.WDTIF/IEN2.WDTIE).
In timer mode, it is possible to clear the timer contents by writing a 1 to WDCTL.CLR[0]. When the timer is cleared, the content of the counter is set to 0. Writing 00 or 01 to WDCTL.MODE[1:0] stops the timer and clears it to 0.
The timer interval is set by the WDCTL.INT[1:0] bits. The interval cannot be changed during timer operation, and should be set when the timer is started. In timer mode, a reset is not produced when the timer interval has been reached.
注意:如果看門狗模式被選擇,那只能等到芯片reset之后定時器模式才能被選擇,
4、工程DEMO
/****************************************************************
* 描 述: 打開看門狗后,得記得喂狗,不然系統就會不停地復位了
綠燈閃=喂狗 紅燈閃=沒有喂狗,系統復位
************************************************************/
#include <ioCC2530.h>
#define uchar unsigned char
#define uint unsigned int
#define LED1 P1_0 // P1.0口控制LED1
#define LED2 P1_1 // P1.1口控制LED2
/***************************************************************
* 名 稱: DelayMS()
* 功 能: 以毫秒為單位延時 16M時約為535,系統時鐘不修改默認為16M
* 入口引數: msec 延時引數,值越大,延時越久
**************************************************************/
void DelayMS(uint msec)
{
uint i,j;
for (i=0; i<msec; i++)
for (j=0; j<535; j++);
}
/*****************************************************************
* 名 稱: InitLed()
* 功 能: 設定LED燈相應的IO口
*************************************************************/
void InitLed()
{
P1DIR |= 0x03; //P1.0、P1.1定義為輸出
LED1 = 1; //默認LED燈為熄滅狀態
LED2 = 0;//系統復位時候,紅燈閃爍一次
DelayMS(100);
LED2=1;
}
void Init_Watchdog()
{
WDCTL = 0x00; //0000 0000 進入IDLE模式,必須進入IDLE才能寫周期
WDCTL |= 0x08; //0000 1000選擇看門狗模式,定時器間隔選擇,間隔一秒
}
void FeetDog() //喂狗
{
WDCTL = 0xa0; //清除定時器,1010 0000當0xA跟隨0x5寫入,表示喂狗
WDCTL = 0x50; //0101 0000
}
void main()
{
InitLed(); //呼叫初始化函式
//此處讓紅綠燈連閃3次,表示啟動
Init_Watchdog();
while(1)
{
DelayMS(5000);
//綠燈亮
FeetDog(); //喂狗系統將不再主動復位,綠燈閃
//注釋FeetDog函式時系統不斷復位,紅燈閃爍
//關閉綠燈
}
}
/*****************************************************************
* 名 稱: Init_Watchdog()
* 功 能: 看門狗初始化
*************************************************************/
void Init_Watchdog(void)
{
WDCTL = 0x00; //打開IDLE才能設定看門狗
WDCTL |= 0x08; //定時器間隔選擇,間隔一秒
}
/*初始化第1行令WDCTL為0是因為下表WDCTL中關于MODE介紹——MODE[1:0]是用來模式選擇,這兩位用來在Watchdog模式或Timer模式啟動看門狗定時器,
其中有個說明:
如果在timer模式想切換到看門狗模式,第一步需要停止WDT,然后才能在看門狗模式啟動WDT,當處在看門狗模式,向這些位寫資料是無效的”,因此向MODE中寫00是使讓看門狗處于IDLE模式(停止timer),接著才能啟動WDT,
初始化第2行是設定INT,選擇超期時限為1s(即設定INT[1:0]=00)
*/
/*下面是喂狗的函式,其中第1、2行設定設定WDCTL為0xa0,緊接著設定為0x50,是一個clear序列,用于清除定時器*/
void FeetDog(void)
{
WDCTL = 0xa0; //清除定時器,當0xA跟隨0x5寫到這些位,定時器被清除
WDCTL = 0x50;
LED2 = 0; //系統不復位LED2燈長亮
}
因此,整個工程的意思是:初始化看門狗并設定1s鐘的喂狗期限,如果整個工程執行程序中超過1s不喂狗,看門狗timer就會產生一個系統reset信號讓系統重置,因此代碼中69行如果注釋掉喂狗,帶來的結果就是系統不斷重啟LED2不斷閃爍;如果喂狗則紅燈不亮,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/142128.html
標籤:其他