原檔案下載鏈接如下:
鏈接:https://pan.baidu.com/s/1bI0rW8hj7DJIx5N8qaZ-wQ
提取碼:2zvx
雖然是非官方渠道,但是題目可信度非常之高,基本是2019年電賽巡線飛行器題目的延續,從巡線機器人到繞塔360度巡檢基本是模擬實際電力巡檢程序中的兩大主要任何,一個是對電力線路的巡檢、一個是對電線塔臺的巡檢,對去年的賽題進行了很好的傳承與發揮,
2019年國賽巡線機器人B題
從賽題說明看2019年國賽和2020差別
2019國賽B題
槍版2020TI三個省賽D題
飛控型別沒有明確限制,和2019年國賽標準一致,依據往屆經驗,肯定更推薦用TI芯片方案,對攜帶遙控器、無線數傳等設備有可能造成的違規作弊行為予以嚴令禁止,有且進允許通過按鍵啟動,這一點規定更加明確、清晰,避免去年國賽不同賽區對此要求認定模糊不清,
?
2020TI電賽繞障飛行器(D 題)
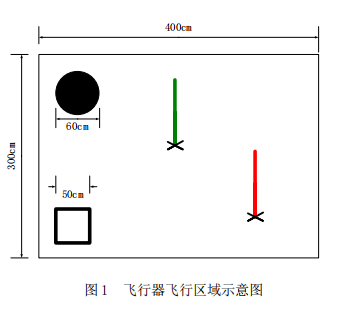
基于多懸翼飛行器設計一個繞障飛 行器(簡稱飛行器),飛行器活動區域示 意圖如圖 1 所示,在圖 1 中,地面上標有 起飛點與降落點,并且還放置了 2 個桿 塔;起飛點用空心黑色矩形框標識,降落 點實心黑色圓標識,桿塔有紅、綠兩種顏 色,
2.要求
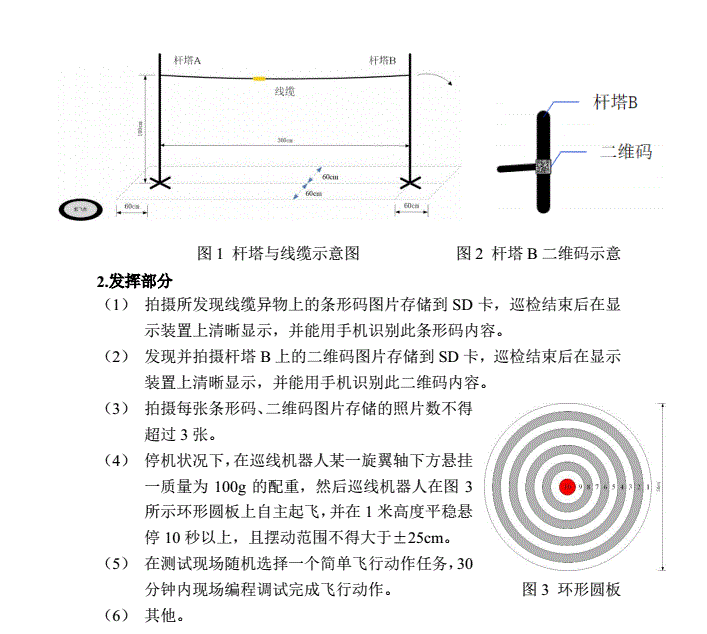
(1) 飛行器從起飛地點垂直起飛升高到 150cm±10cm 的巡航高度, (15 分)
(2) 巡航飛行中發現桿塔,以聲音提示,并用與所發現桿塔相同顏色的 LED 閃爍 數次指示, (20 分)
(3) 在巡航高度以桿塔為中心,繞所發現的桿塔抵近飛行一周(360°及以上);繞 飛時飛行器與桿塔最近點距離在 50±10cm;紅色桿塔時飛行器沿順時針方向(頂視)繞 飛,綠色桿塔時飛行器沿逆時針方向(頂視)繞飛, (30 分)
(4) 飛行區域中所有桿塔均被發現并識別、繞飛后,尋找降落點標識緩慢平穩準確 地降落在降落區域內, (10 分)
(5) 整個飛行程序用時不得超過 5 分鐘,按用時計分,越快越好, (15 分)
(6) 其他, (10 分)
(7) 設計報告

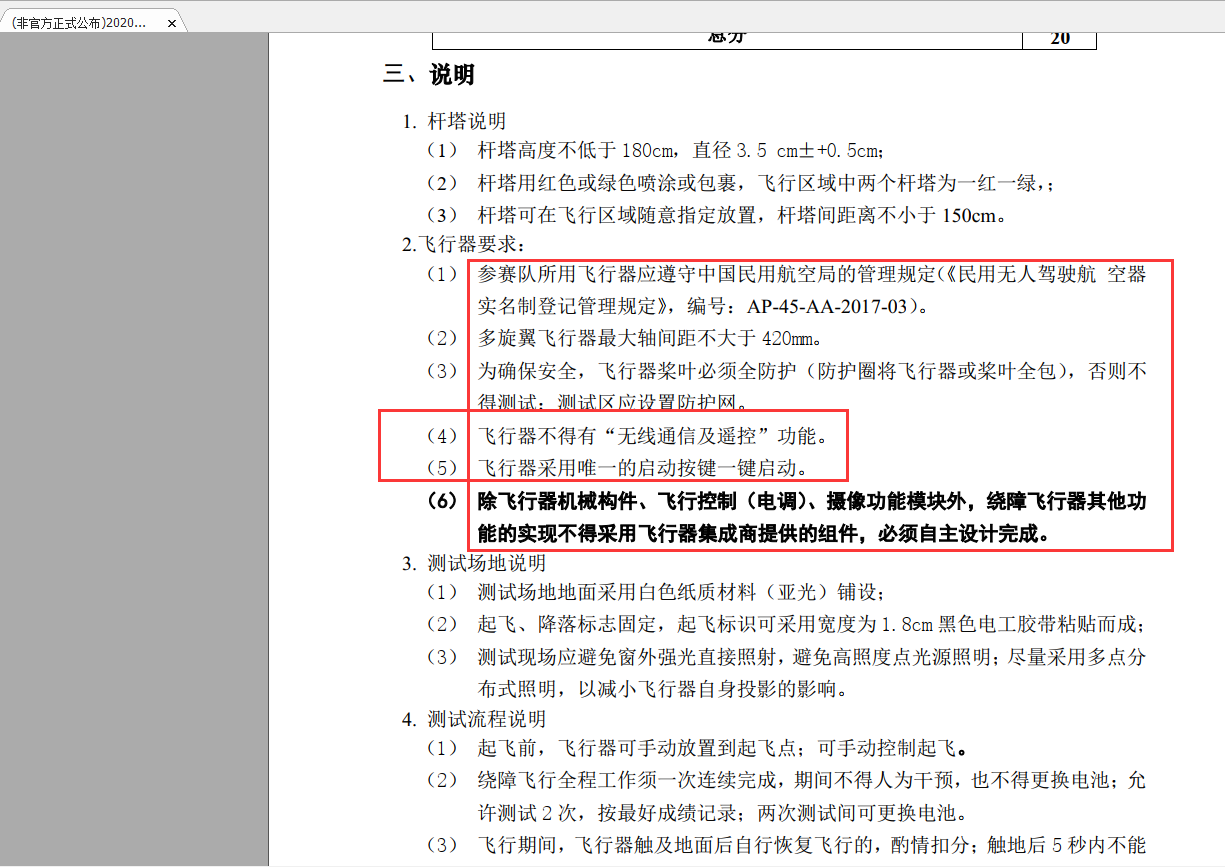
三、說明

1. 桿塔說明
(1) 桿塔高度不低于 180cm,直徑 3.5 cm±+0.5cm;
(2) 桿塔用紅色或綠色噴涂或包裹,飛行區域中兩個桿塔為一紅一綠,;
(3) 桿塔可在飛行區域隨意指定放置,桿塔間距離不小于 150cm,

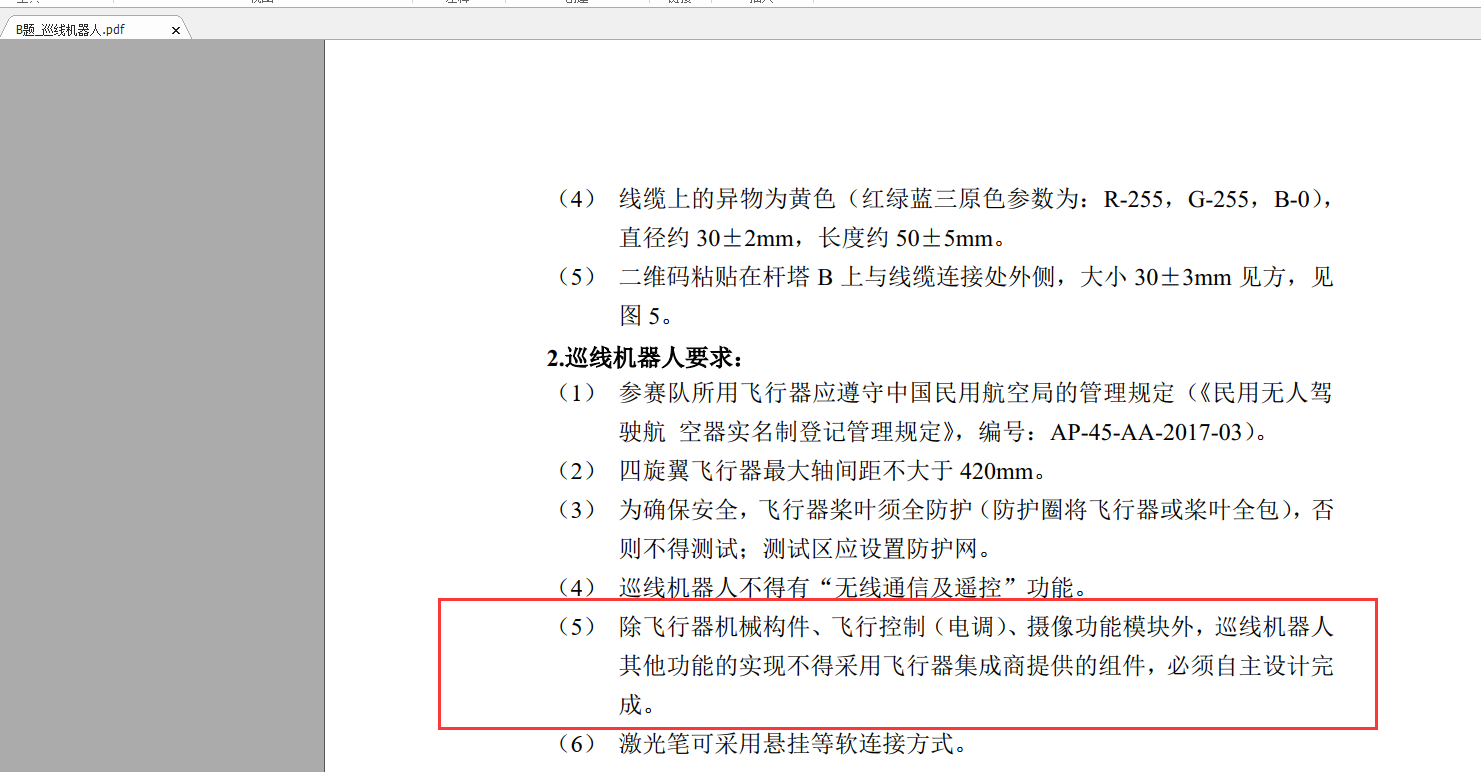
2.飛行器要求:
(1) 參賽隊所用飛行器應遵守中國民用航空局的管理規定(《民用無人駕駛航 空器 實名制登記管理規定》,編號:AP-45-AA-2017-03),
(2) 多旋翼飛行器最大軸間距不大于 420mm,
(3) 為確保安全,飛行器槳葉必須全防護(防護圈將飛行器或槳葉全包),否則不 得測驗;測驗區應設定防護網,
(4) 飛行器不得有“無線通信及遙控”功能,
(5) 飛行器采用唯一的啟動按鍵一鍵啟動,
(6) 除飛行器機械構件、飛行控制(電調)、攝像功能模塊外,繞障飛行器其他功 能的實作不得采用飛行器集成商提供的組件,必須自主設計完成,
3. 測驗場地說明
(1) 測驗場地地面采用白色紙質材料(亞光)鋪設;
(2) 起飛、降落標志固定,起飛標識可采用寬度為 1.8cm 黑色電工膠帶粘貼而成;
(3) 測驗現場應避免窗外強光直接照射,避免高照度點光源照明;盡量采用多點分 布式照明,以減小飛行器自身投影的影響,
4. 測驗流程說明
(1) 起飛前,飛行器可手動放置到起飛點;可手動控制起飛,
(2) 繞障飛行全程作業須一次連續完成,期間不得人為干預,也不得更換電池;允 許測驗 2 次,按最好成績記錄;兩次測驗間可更換電池,
(3) 飛行期間,飛行器觸及地面后自行恢復飛行的,酌情扣分;觸地后 5 秒內不能 自行恢復飛行視為失敗,失敗前完成動作仍計分,
(4) 平穩降落是指在降落程序中無明顯的跌落、彈跳及著地后滑行等情況出現, 除錯及測驗時必須佩帶防護眼鏡,穿戴防護手套,
最后給出去年2019年參賽隊員的經驗總結好文鏈接(可能會對今年繞桿定位有幫助),
https://blog.csdn.net/xlazydog/article/details/99452860
包括
1、塔桿定點控制
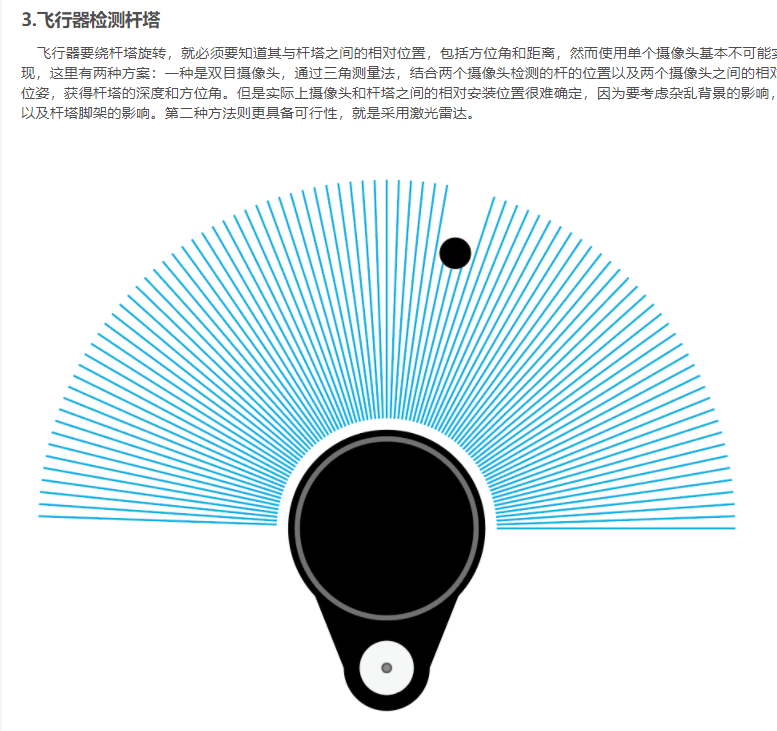
2、巡線控制
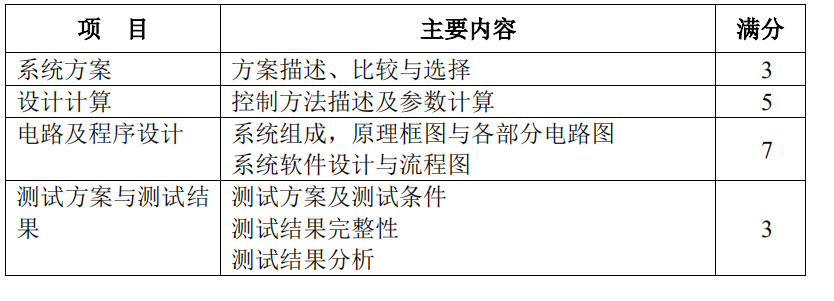
3、繞桿控制
.......................
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/168170.html
標籤:其他
上一篇:三維建模obj檔案