MATLAB與Robotstudio建立socket通信
內容概括
哈哈,本人人生中的第一篇博客,也算是向博客大佬們看齊的第一個步伐啦,話不多說,直奔主題,這篇寫的是這兩天做的MATLAB與RobotStudio建立socket通訊的一個實體,機器人可以發位置資料給MATLAB,MATLAB也可以發送想要到達的目標位置點給機器人讓機器人動作,當然,這只是這兩天做的一個初步的成果,有待改善和添加的功能還很多,,,
方法和思路
首先,我是看了這個博客大佬的寫的MATLAB與Robotstudio建立socket通信這篇文章,根據這個小case寫的,當然,該博主后期也寫了很多很厲害的實體出來,奈何本人能力有限,先從基礎的練起來(認真臉)!!!
有了小case之后,就理了下思路,查找那個博主的思路來源,是西班牙的一篇論文,名字和PDF版可以去那位博主的博客上去找(論文是西班牙語,是時候掏出翻譯軟體了!),該論文講述了MATLAB三種方法來實作該功能,分別是GUI、CLASS和Simulink,由于是探索階段,本文準備用最簡單最直觀的MATLAB GUI的方法來實作,另外,論文中所說MATLAB需要兩個工具包,一個是外國的Peter Corke大佬寫的工具箱Robotics Toolbox,他的個人主頁上可以免費下載(這個人寫的書也是很厲害的,推薦學機器人的去康康),但是好像需要科學上網,另外一個工具箱是MATLAB里的Instrument Control Toolbox(一般都會有),
準備作業做好之后,我的大致步驟是:
1.按照case,MATLAB和Robot Studio之間先建立基本的通訊,即能夠互相簡單的發一串字串給對方,
2.簡單粗略的學習一下MATLAB GUI的知識,推薦視頻一把王者榮耀的時間,讓你學會MATLAB GUI,哈哈,真的就學了一會,能用起來,但是界面做的并不美觀,后期再深造一下吧哈哈,
3.實驗在RobotStudio中獲取當前機器人的位置,并發送過去,
4.實驗在MATLAB中轉換四元數,把位置資料和四元數統一成一個檔案包發送給RobotStudio,
5.改行程式,使得通信能夠互相協調,
實踐成果
界面展示
話不多說,先放上基本的界面,由于初次寫博客,動圖還不知怎么加上去,反正基本的要求都能實作了,根據這張圖可以自行想象一下動態程序~~
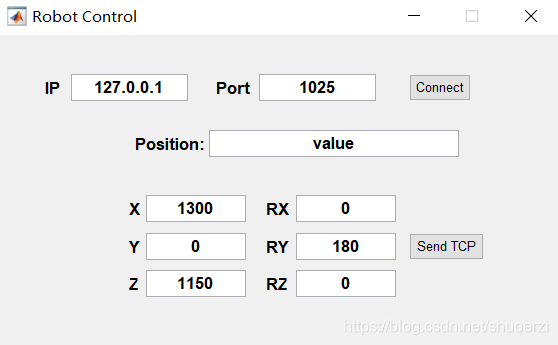
如圖所示,在RobotStudio(作為Sever)中先運行寫好的程式,再運行MATLAB(作為Client),輸入IP地址和Port號點擊Connect,會彈出運行成功的視窗,此時,機器人已經把它的位置發過來了,并展現在Position欄的文本框中,用戶可以輸入目標點資訊(X、Y、Z位置資訊和RX、RY、RZ工具姿態),點擊SendTCP之后,發送給Robot,Robot就會MoveJ到相應的位置,當然,用戶并不能隨意輸入,因為機器人很多的位置和姿態都是到達不了的,還有奇異值等問題,用戶需要根據實際情況合理的輸入目標點位置和姿態資料,在Robot到達你所指定的位置之后,會發送給界面它目前所在的位置,即Position一欄會更新位置資訊,便于實時的監控機器人的位置資訊,
代碼展示
還是直接上代碼來的利索,先說一下RS那邊的代碼吧,RS中一定要選擇616-1 PC Interface(進行Socket通訊)和623-1 Multitasking(多任務執行)這兩個選項,因為RS中通訊和機器人運動是同時進行的,所以要選擇這個選項,先展示下機器人通訊的主要代碼:
PROC Routine()
SocketCreate temp_socket;
SocketBind temp_socket,"127.0.0.1",1025;
SocketListen temp_socket;
! Waiting for a connection request
SocketAccept temp_socket,client_socket;
! Communication
WHILE keep_listening DO
!Calculate current position
Current_Pose:=CRobT(\TaskRef:=robot_motionId\Tool:=tool0\WObj:=wobj0);
send_string:=ValToStr(Current_Pose.trans);
!Send current position to matlab
SocketSend client_socket\Str:=send_string+"\0D\0A";
!Receive the TCP data from matlab
receive_status:=FALSE;
SocketReceive client_socket\Str:=received_string;
received:=received_string;
receive_status:=TRUE;
WaitTime 1;
ENDWHILE
SocketClose client_socket;
SocketClose temp_socket;
ENDPROC
RAPID程式好像不太支持Markdown,湊合看吧,,,
這里程式的這一行值得說一下 :
SocketSend client_socket\Str:=send_string+"\0D\0A";
一開始我是沒有加這一部分的+"\0D\0A",這樣就導致了MATLAB收一條資訊要很久,而且會報出如下的警告:

經過排查原因,是終止符的原因,查取ABB的隨機光碟得知,RS里的終止符合一般的終止符不一樣,并不是回車換行符/s/n,屬于不可列印字符,即ASSCII碼的特殊字符,如回車換行符為“\0D\0A”,因為MATLAB不認識這個終止符,導致很久都找不到結尾在哪里,并且出現警告,反正加上就好啦,颼颼的~~
接著是決議轉換發送字串的代碼(沒來得及寫注釋,先放著吧),,
PROC encode_string()
Strread:=received;
LenString:=StrLen(Strread);
StartBit1:=1;
EndBit1:=StrFind(Strread,StartBit1,",");
LenBit1:=EndBit1-StartBit1;
StartBit2:=EndBit1+1;
EndBit2:=StrFind(Strread,StartBit2,",");
LenBit2:=EndBit2-StartBit2;
StartBit3:=EndBit2+1;
EndBit3:=StrFind(Strread,StartBit3,",");
LenBit3:=EndBit3-StartBit3;
StartBit4:=EndBit3+1;
EndBit4:=StrFind(Strread,StartBit4,",");
LenBit4:=EndBit4-StartBit4;
StartBit5:=EndBit4+1;
EndBit5:=StrFind(Strread,StartBit5,",");
LenBit5:=EndBit5-StartBit5;
StartBit6:=EndBit5+1;
EndBit6:=StrFind(Strread,StartBit6,",");
LenBit6:=EndBit6-StartBit6;
StartBit7:=EndBit6+1;
EndBit7:=StrFind(Strread,StartBit7,",");
LenBit7:=EndBit7-StartBit7;
StartBit8:=EndBit7+1;
EndBit8:=StrFind(Strread,StartBit8,",");
LenBit8:=EndBit8-StartBit8;
data_type:=StrPart(Strread,StartBit1,LenBit1);
XData:=StrPart(Strread,StartBit2,LenBit2);
YData:=StrPart(Strread,StartBit3,LenBit3);
ZData:=StrPart(Strread,StartBit4,LenBit4);
q1Data:=StrPart(Strread,StartBit5,LenBit5);
q2Data:=StrPart(Strread,StartBit6,LenBit6);
q3Data:=StrPart(Strread,StartBit7,LenBit7);
q4Data:=StrPart(Strread,StartBit8,LenBit8);
DataTRUE:=StrToVal(XData,x);
DataTRUE:=StrToVal(YData,y);
DataTRUE:=StrToVal(ZData,z);
DataTRUE:=StrToVal(q1Data,q1);
DataTRUE:=StrToVal(q2Data,q2);
DataTRUE:=StrToVal(q3Data,q3);
DataTRUE:=StrToVal(q4Data,q4);
ENDPROC
接著是機器人移動的代碼:
PROC main()
! Wait the receive string
WaitUntil receive_status;
! Received string convert into data
encode_string;
! Give the data to the Target
IF DataTRUE THEN
Target_20.trans.x:=x;
Target_20.trans.y:=y;
Target_20.trans.z:=z;
Target_20.rot.q1:=q1;
Target_20.rot.q2:=q2;
Target_20.rot.q3:=q3;
Target_20.rot.q4:=q4;
Data_Assignment:=TRUE;
ELSE
TPWrite "Problems with data conversion!";
ENDIF
WaitUntil Data_Assignment;
! Make the robot move to the desire position
MoveJ Target_20,v1000,z20,tool0;
ENDPROC
然后是MATLAB這邊的代碼,由于控制元件代碼太長了但很簡單,就只展示重要控制元件CallBack函式的代碼:
%Connect按鈕的Callback
function Connect_to_Robot(~,~)
global GUI
global IP
global Port
global client_socket
IP=get(GUI.IP_Address,'String');
Port=get(GUI.Port_Address,'String');
Port=str2double(Port);
%connect to the robot
client_socket = tcpip(IP,Port);
fopen(client_socket);
msgbox('Successful Connected!')
message= fgetl(client_socket);
message=splitlines(message);
position=message{1,1};
set(GUI.Position_All,'String',position);
guidata(GUI.IP_Address,IP);
guidata(GUI.Port_Address,Port);
end
%TCP Send按鈕的Callback
function TCP_button(~,~)
global GUI
global X
global Y
global Z
global RX
global RY
global RZ
global client_socket
X=get(GUI.X,'string');
Y=get(GUI.Y,'string');
Z=get(GUI.Z,'string');
RX=get(GUI.RX,'string');
RX_num=str2double(RX);
RY=get(GUI.RY,'string');
RY_num=str2double(RY);
RZ=get(GUI.RZ,'string');
RZ_num=str2double(RZ);
%計算四元數
Q=Quaternion(rotx(RX_num*pi/180)*roty(RY_num*pi/180)*rotz(RZ_num*pi/180));
%計算的數值轉換成字串
q1= num2str(Q.s);
q2= num2str(Q.v(1));
q3= num2str(Q.v(2));
q4= num2str(Q.v(3));
%字串整合在一起
Send1=['1',',',X,',',Y,',',Z,',',q1,',',q2,',',q3,',',q4,','];
%發送給robot
fwrite(client_socket,Send1);
pause(1.5);
%讀取回傳的位置資料
message= fgetl(client_socket);
message=splitlines(message);
position=message{1,1};
set(GUI.Position_All,'String',position);
end
總結
核心代碼都已奉上了,當然不足之處也有很多,該文也只實作了很簡單的一些功能,后期還需要改進和完善,像那位博主一樣,在界面上加上關節值的滾動條來使機器人動作也是能實作的,但是實時性對我來說還是個難題,而且,再大膽想象一下,改進軌跡規劃的演算法如果能利用這個通訊,在MATLAB中改進演算法后就可以在RS中看到軌跡規劃的真實場景了,再往后展望,和機器視覺結合起來,自動避障也是一個好的idea,當然,還需要更扎實的編程基礎和演算法知識,路漫漫其修遠兮,希望未來能夠做出來~
對本文有什么疑問的小伙伴也歡迎和我交流啊,互相進步互相學習,留言可能不及時看到,郵箱lishuo18855443656@163.com~~
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/183408.html
標籤:其他
上一篇:蒙特卡羅計算積分