閱讀原文還請移步我的知乎專欄:
https://www.zhihu.com/column/c_1287066237843951616
首先力薦鄢社鋒老師的書籍《優化陣列信號處理》,對于麥克風陣列信號處理的講解非常全面,對陣列的基本概念與優化方法講的很是透徹,而且最重要事情當然是全中文的啦,而且鄢社鋒是本領域的頂尖專家,比很多翻譯過來的外文書籍要好很多,值得閱讀,個人感覺比陳老師的《Microphone Array Signal Processing》要更容易理解、更容易上手很多,因為這本書里面包含了很多的案例用以對比演示,但是很遺憾,我并沒有找到鄢老師的相關代碼,所以干脆就自己動手,看書的同時順帶實作了幾個,
所以,本文是后續系列文章的第一篇,記錄案例實作的程序與代碼,對于案例的解釋主要為原書內容,自己進行了簡化,便于后續理解,本文講述第二章的案例2.2、2.3與2.4,對比試驗了常規波束形成與MVDR最優波束形成的波束圖、方位掃描圖與陣增益,以及自己實作的代碼,
例2.2 常規波束圖、常規波束掃描方位譜
考慮一個10元標準線列陣,假設一功率為1的單頻信號從 方向入射到基陣,不考慮噪聲,用如下公式計算資料協方差矩陣:
以基陣在 方向的回應向量作為導向向量,即
,采用式
計算常規波束加權向量,用式
波束圖
計算波束回應,將得到的波束圖顯示于圖 2(a)中,圖中可以看見波束主瓣指向方位,這意味著該波束形成器對
方向到達的信號回應最大,附代碼實作,在圖片上方,
%% 2(a) 常規波束形成波束圖 代碼實作部分
clear; close all; clc;
c=340; %聲速
f=1000; %頻率
lambda = c / f;
k = 2*pi*f / c;
space = lambda/2; %麥克風間距
M = 10; %麥克風數量
theta_d = 80*pi/180; %入射角度
theta_angle = 0:0.1:180;
theta = theta_angle*pi/180;
Wc = exp(-1i*k*space*[0:M-1]*cos(theta_d)) / M;
B = zeros(size(theta));
%% 計算波束圖
for i = 1:length(theta)
p = exp(1i*k*space*[0:M-1]*cos(theta(i)));
B(i) = conj(Wc)*p';
end
B_db = 20*log10(B);
limit_dB = -50;
index = B_db < limit_dB;
B_db(index) = limit_dB;
figure;
plot(theta_angle, B_db, 'linewidth', 1.5);
grid on;xlabel('方位(^o)'); ylabel('20lg(B)/dB');
title('波束圖');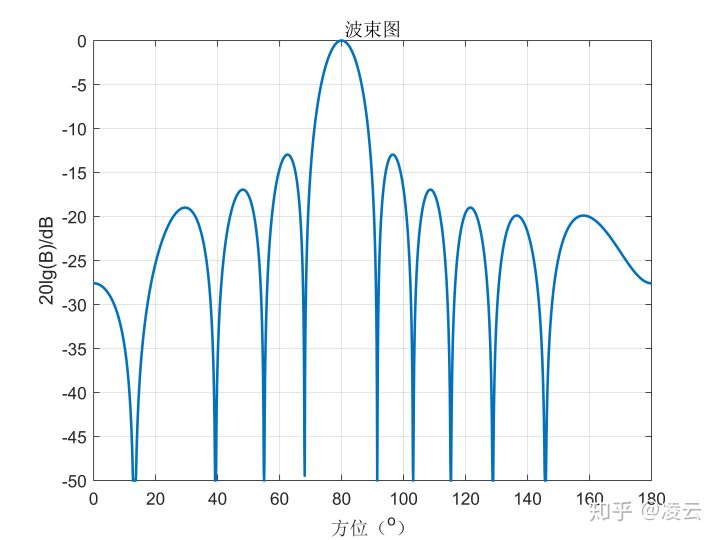
2(a) 常規波束形成波束圖
波束掃描方位譜
進行波束掃描,即讓 在
內變化,取導向向量為
,用下式
計算出波束掃描方位譜,顯示于圖 2(b)中,從圖中可以看出,在 位存在一個主峰值,該峰值表示在該方位存在一個信號,峰值大小為 0dB,表示該方位波束輸出功率為1,即該方向到達信號功率估計值為1,同時注意到,雖然只有
方向存在信號,其他方位沒有信號,但從方位譜上觀察,其他方位的波束輸出功率并不為0,好像是出現了“能量泄漏”,這是由于波束旁瓣引起的,對于遠離信號方向的波束,由于常規波束的旁瓣比較高,即使信號位于這些波束的旁瓣,旁瓣對該信號有一定的抑制,但是波束輸出并不為0,因此表現為在方位譜上非信號方向存在輸出功率,可以預見,由于常規波束較高的旁瓣,可能會因為強信號的“能量泄漏”而淹沒了其他方位的弱信號,這一點在后文的仿真中將會看到,
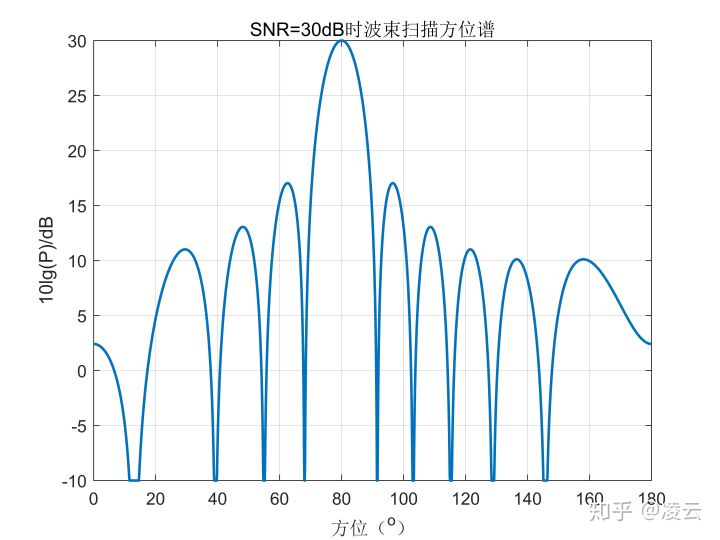
比較圖2(a)與圖2(b)發現,指向信號方向的常規波束圖與常規波束掃描方位譜曲線完全相同,這是在僅存在單位功率平面波信號時常規波束形成特有的現象,其他波束形成方法不存在此現象,假設基陣接收到功率為 0dB的空間白噪聲,信號功率增加到 30dB,即輸入信噪比 ,采用常規波束掃描得到的方位譜如圖 2(c)所示,圖中指示在
方向方位譜大約為 30dB,表示該方位信號功率估計值約為 30dB,代碼實作參考 2(b),不再贅述,
%% 2(b) 常規波束掃描方位譜,代碼實作部分
p = exp(1i*k*space*[0:M-1]*cos(theta_d));
Rx = (p')*conj(p);
B = zeros(size(theta));
for i = 1:length(theta)
Wcc = exp(-1i*k*space*[0:M-1]*cos(theta(i))) / M;
B(i) = conj(Wcc)*Rx*Wcc';
end
B_db = 10*log10(B);
limit_dB = -50;
index = B_db < limit_dB;
B_db(index) = limit_dB;
figure;
plot(theta_angle, B_db, 'linewidth', 1.5);
grid on;
xlabel('方位(^o)'); ylabel('10lg(P)/dB');
title('波束掃描方位譜');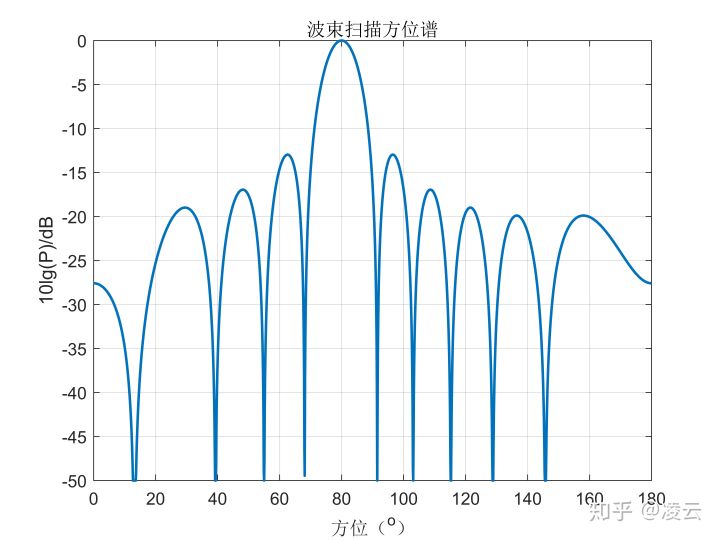
2(b) 常規波束掃描方位譜
2(c) 常規波束掃描方位圖
波束陣增益
應用公式:
計算掃描到各方位時波束陣增益,顯示于圖 2(d)中,圖中可見,該曲線形狀與圖2(a)中波束形狀相同,但高出10dB ,即為最高陣增益,從該圖可以知,當波束對準信號方向時,波束形成器的陣增益最大;波束觀察方位與信號方位存在偏差時,波束陣增益減小,只要方位偏差不太大(在半功率束寬以內),陣增益比最大值下降得并不多,
%% 2(d) 常規波束陣增益 代碼實作部分
p_ = exp(1i*k*space*[0:M-1]*cos(theta_d));
B = zeros(size(theta));
for i = 1:length(theta)
p = exp(1i*k*space*[0:M-1]*cos(theta(i)));
B(i) = (conj(p_) * p').^2 / (conj(p_)*p_');
end
B_db = 10*log10(B);
limit_dB = -50;
index = B_db < limit_dB;
B_db(index) = limit_dB;
figure;
plot(theta_angle, B_db, 'linewidth', 1.5);
grid on;
xlabel('方位(^o)'); ylabel('10lg(G)/dB');
title('不同方向波束陣增益');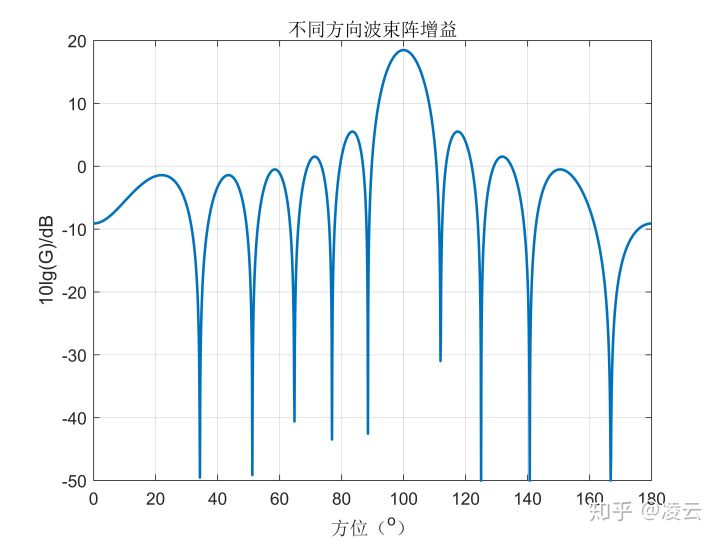
2(d) 常規波束陣增益
例2.3 MVDR波束形成
考慮一個10元標準線列陣,假設基陣接收噪聲是功率為0dB 高斯白噪聲,即 ,一信噪比為
的單頻信號從
方向入射到基陣,用下式計算資料協方差矩陣
,
MVDR波束形成器波束圖
采用下式
設計MVDR 波束形成器加權向量,圖 3(a)顯示了觀察方向分別為與
的兩個波束圖,對于
方向波束形成器,它相當于
的情況,
方向平面波被視作干擾;對于
方向波束,
方向平面波為期望信號,對應于
的情況,
對于方向的波束圖,它在
方向的回應為
,由于MVDR波束形成器的特性,為了使波束輸出功率最小,該波束在
方向形成零點以最大限度抑制來自該方向的干擾,對于
方向的波束圖,假想導向向量與真實基陣回應向量相等,又由于
,該MVDR波束形成器蛻化為常規波束形成器,所以該波束圖與圖 2(a)中的常規波束圖相同,
%% 3(a) MVDR波束形成器波束圖,代碼實作
c=340; %聲速
f=1000; %頻率
lambda = c / f;
k = 2*pi*f / c;
space = lambda/2; %麥克風間距
M = 10; %麥克風數量
theta_angle = 0:0.1:180;
theta = theta_angle*pi/180;
theta_d1 = 80*pi/180; %入射角度
p_1 = exp(1i*k*space*[0:M-1]*cos(theta_d1))';
Rx = conj(p_1)*p_1'*10^(30/10) + eye(M)*10^(0/10);
Wc = Rx\p_1 / (conj(p_1')*inv(Rx)*p_1);
B = zeros(size(theta));
%% 計算波束圖 80度
for i = 1:length(theta)
p = exp(1i*k*space*[0:M-1]*cos(theta(i)))';
B(i) = conj(Wc')*p;
end
B_db = 20*log10(B);
limit_dB = -50;
index = B_db < limit_dB;
B_db(index) = limit_dB;
figure;
plot(theta_angle, B_db, 'linewidth', 1.5);
hold on;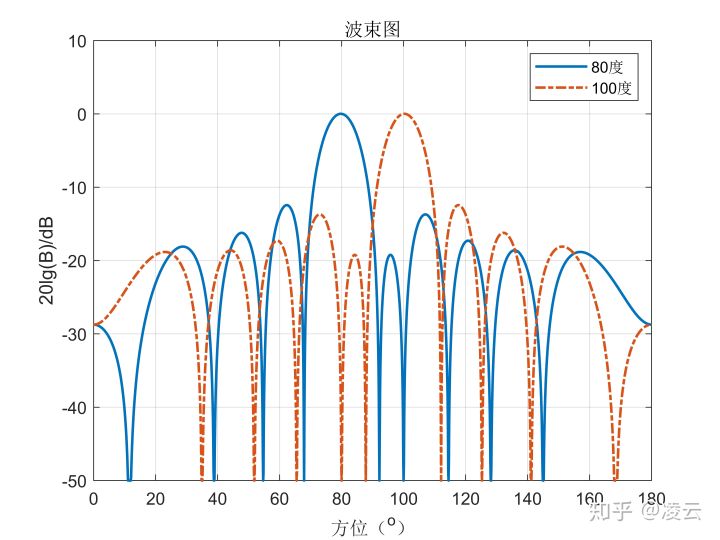
3(a) MVDR波束形成器波束圖
MVDR波束掃描方位譜
采用MVDR波束掃描估計方位譜,其中掃描方位間隔為 ,得到的方位譜顯示于圖 3(b)中,與圖 2(b)相比較可見,MVDR波束掃描得到的方位譜峰值更尖銳,可見,MVDR波束掃描能提供比常規波束掃描較高的方位分辨能力,
%% 3(b) MVDR波束形成器波束掃描方位譜圖,代碼實作
theta_angle = 0:1:180;
theta = theta_angle*pi/180;
theta_d1 = 80*pi/180; %入射角度1
p_1 = exp(1i*k*space*[0:M-1]*cos(theta_d1))';
Rx = (p_1)*conj(p_1')*10^(30/10);
B = zeros(size(theta));
for i = 1:length(theta)
p = exp(1i*k*space*[0:M-1]*cos(theta(i)))';
Wcc = Rx\p / (conj(p')*(Rx\p));
B(i) = conj(Wcc')*Rx*Wcc;
end
B_db = 10*log10(B);
limit_dB = -10;
index = B_db < limit_dB;
B_db(index) = limit_dB;
figure;
plot(theta_angle, B_db, 'linewidth', 1.5);
hold on;
plot(80, 30, 'ro', 'linewidth', 1.5);
grid on;
legend('方位譜', '真實信號');
xlabel('方位(^o)'); ylabel('10lg(P)/dB');
title('波束掃描方位譜');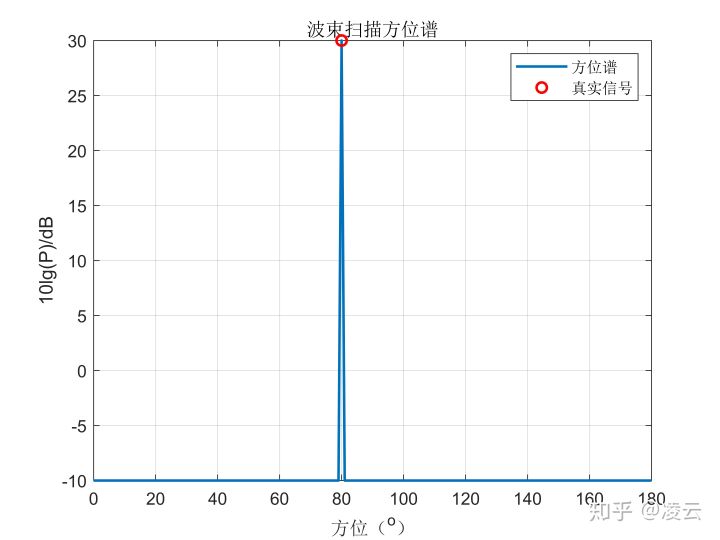
3(b) MVDR波束形成器波束掃描方位譜圖
MVDR波束形成器加權向量范數
圖 3(v)顯示了各掃描方位波束的加權向量范數 ,從圖中可以看出,在波束觀察方向距離信號方向較遠時(例如本例中與信號間隔
以上),波束形成器加權向量范數較小,接近于最小值,間隔較近時,隨著間隔減小,加權向量范數逐漸增加;而當波束方向恰好等于信號方向時,加權向量范數突然下降到與間隔較遠的方位同一大小(因為此時波束形成器蛻化為常規波束形成器),
%% 3(c) MVDR波束形成器加權向量范數,代碼實作
theta_angle = 0:0.1:180;
theta = theta_angle*pi/180;
theta_d1 = 90*pi/180; %入射角度1
p_1 = exp(1i*k*space*[0:M-1]*cos(theta_d1))';
Rx = (p_1)*conj(p_1')*10^(30/10);
B = zeros(size(theta));
for i = 1:length(theta)
p = exp(1i*k*space*[0:M-1]*cos(theta(i)))';
Wcc = Rx\p / (conj(p')*(Rx\p));
B(i) = norm(Wcc)*norm(Wcc);
end
B_db = 10*log10(B);
limit_dB = -50;
index = B_db < limit_dB;
B_db(index) = limit_dB;
figure;
plot(theta_angle, B_db, 'linewidth', 1.5);
grid on;
xlabel('方位(^o)'); ylabel('10lg(w^2)/dB');
title('加權向量范數');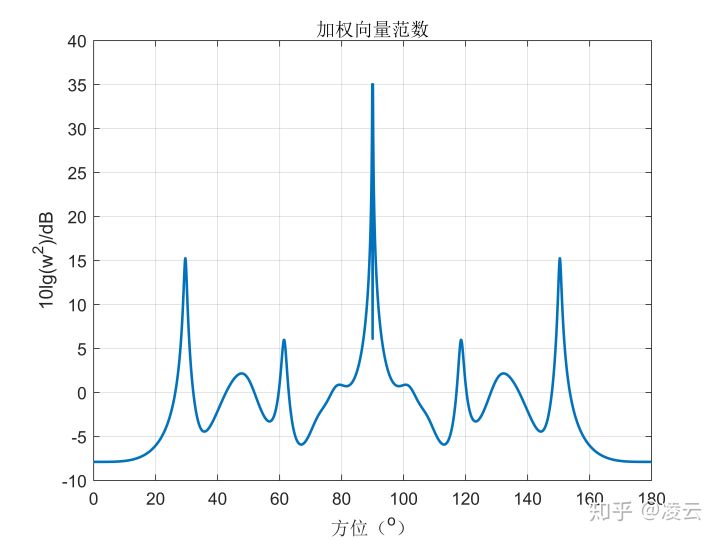
3(c) MVDR波束形成器加權向量范數
例2.4 兩信號源情況下MVDR與常規波束形成器的比較
考慮一個 10元標準線列陣,基陣接收噪聲是功率為 0dB高斯白噪聲,兩個信噪比分別為 15dB與 30dB的單頻信號分別從 與
方向入射到基陣,
分別采用常規波束形成與MVDR波束形成掃描,得到的方位譜分別如圖4(a) 與圖4(b) 所示,
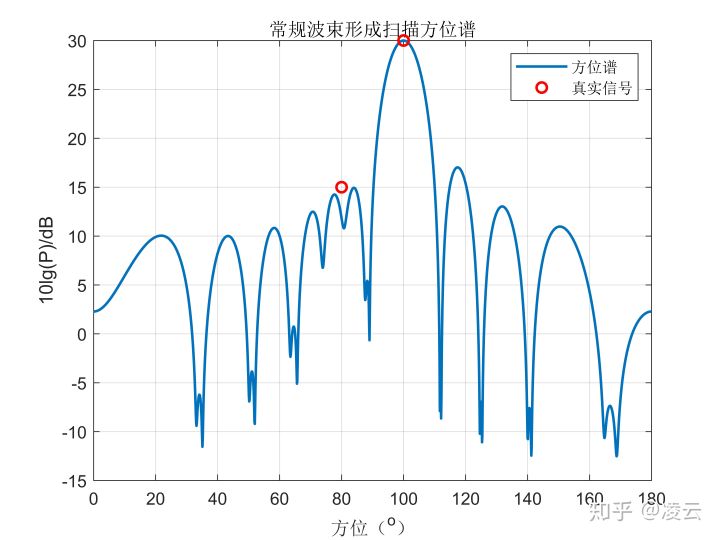
4(a) 兩信號源常規波束形成器
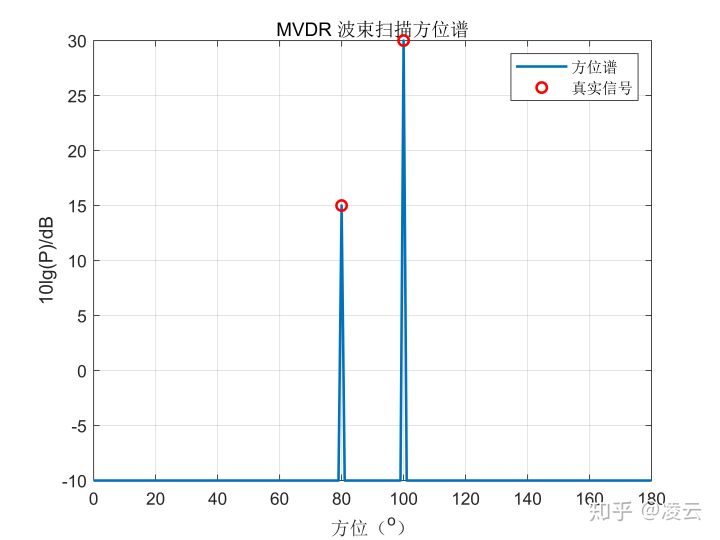
4(b) 兩信號源MVDR波束形成器
參考資料
1、《優化陣列信號處理》,鄢社鋒
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/190001.html
標籤:其他
上一篇:視頻講解編程題:Redis + FastDFS 小視頻上傳
下一篇:第二次作業進展報告