ESP32支持ROS1和ROS2,很方便使用,有兩種主流方式:
- arduino IDE (1.8.13)
- esp idf(4.2)
網上和Github上有很多方式,用了一下都感覺不適合我!
其實很簡單,和esp8266類似,只用arduino自帶的ros包即可,注意版本號0.7.8,
參考如下:ESP8266和ESP32配置(需使用ROS1和ROS2)
這里,主要看原始碼需要修改的地方,頭檔案!
esp8266使用/home/ros/.arduino15/packages/esp8266/hardware/esp8266/2.7.4/libraries/ESP8266WiFi/src
- ESP8266WiFi.h
#ifndef WiFi_h
#define WiFi_h
#include <stdint.h>
extern "C" {
#include "include/wl_definitions.h"
}
#include "IPAddress.h"
#include "ESP8266WiFiType.h"
#include "ESP8266WiFiSTA.h"
#include "ESP8266WiFiAP.h"
#include "ESP8266WiFiScan.h"
#include "ESP8266WiFiGeneric.h"
#include "WiFiClient.h"
#include "WiFiServer.h"
#include "WiFiServerSecure.h"
#include "WiFiClientSecure.h"
#include "BearSSLHelpers.h"
#include "CertStoreBearSSL.h"
#ifdef DEBUG_ESP_WIFI
#ifdef DEBUG_ESP_PORT
#define DEBUG_WIFI(fmt, ...) DEBUG_ESP_PORT.printf_P( (PGM_P)PSTR(fmt), ##__VA_ARGS__ )
#endif
#endif
#ifndef DEBUG_WIFI
#define DEBUG_WIFI(...) do { (void)0; } while (0)
#endif
class ESP8266WiFiClass : public ESP8266WiFiGenericClass, public ESP8266WiFiSTAClass, public ESP8266WiFiScanClass, public ESP8266WiFiAPClass {
public:
// workaround same function name with different signature
using ESP8266WiFiGenericClass::channel;
using ESP8266WiFiSTAClass::SSID;
using ESP8266WiFiSTAClass::RSSI;
using ESP8266WiFiSTAClass::BSSID;
using ESP8266WiFiSTAClass::BSSIDstr;
using ESP8266WiFiScanClass::SSID;
using ESP8266WiFiScanClass::encryptionType;
using ESP8266WiFiScanClass::RSSI;
using ESP8266WiFiScanClass::BSSID;
using ESP8266WiFiScanClass::BSSIDstr;
using ESP8266WiFiScanClass::channel;
using ESP8266WiFiScanClass::isHidden;
// ----------------------------------------------------------------------------------------------
// ------------------------------------------- Debug --------------------------------------------
// ----------------------------------------------------------------------------------------------
public:
void printDiag(Print& dest);
friend class WiFiClient;
friend class WiFiServer;
};
extern ESP8266WiFiClass WiFi;
#endifesp32使用/home/ros/.arduino15/packages/esp32/hardware/esp32/1.0.4/libraries/WiFi/src
- WiFi.h
這個會和系統目錄中wifi.h重合,請務必保證編譯時頭檔案路徑正確!
#ifndef WiFi_h
#define WiFi_h
#include <stdint.h>
#include "Print.h"
#include "IPAddress.h"
#include "IPv6Address.h"
#include "WiFiType.h"
#include "WiFiSTA.h"
#include "WiFiAP.h"
#include "WiFiScan.h"
#include "WiFiGeneric.h"
#include "WiFiClient.h"
#include "WiFiServer.h"
#include "WiFiUdp.h"
class WiFiClass : public WiFiGenericClass, public WiFiSTAClass, public WiFiScanClass, public WiFiAPClass
{
public:
using WiFiGenericClass::channel;
using WiFiSTAClass::SSID;
using WiFiSTAClass::RSSI;
using WiFiSTAClass::BSSID;
using WiFiSTAClass::BSSIDstr;
using WiFiScanClass::SSID;
using WiFiScanClass::encryptionType;
using WiFiScanClass::RSSI;
using WiFiScanClass::BSSID;
using WiFiScanClass::BSSIDstr;
using WiFiScanClass::channel;
public:
void printDiag(Print& dest);
friend class WiFiClient;
friend class WiFiServer;
friend class WiFiUDP;
};
extern WiFiClass WiFi;
#endif一切正常愉快玩耍:
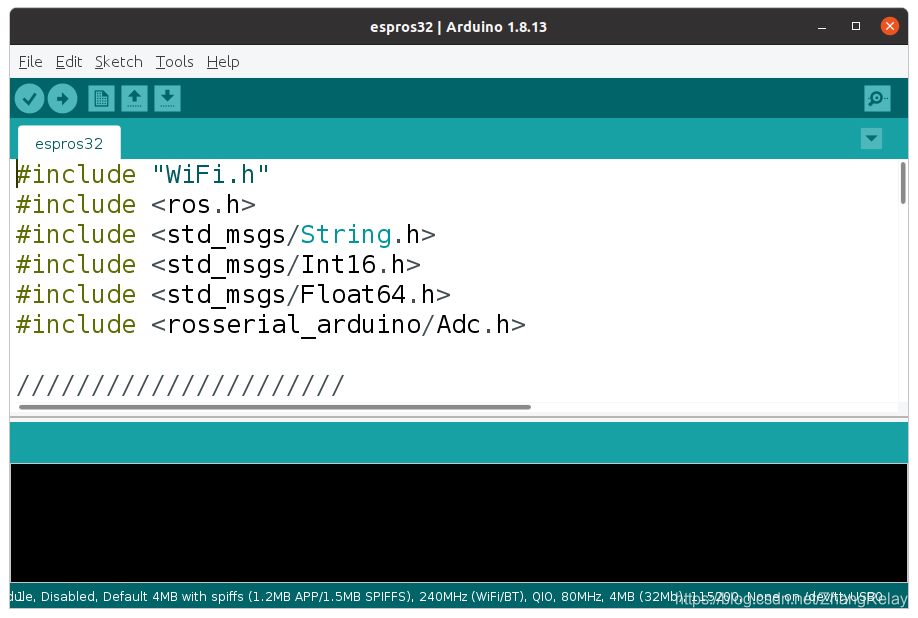
編譯如有問題請自行查錯修訂,測驗過代碼如下,wifi名和密碼為***,請用實際替換,UART使用如教程一致:
#include "WiFi.h"
#include <ros.h>
#include <std_msgs/String.h>
#include <std_msgs/Int16.h>
#include <std_msgs/Float64.h>
#include <rosserial_arduino/Adc.h>
//
// WiFi Definitions //
//
const char* ssid = "********";
const char* password = "*********";
IPAddress server(172, 20, 10, 3); // ip of your ROS server
IPAddress ip_address;
int status = WL_IDLE_STATUS;
WiFiClient client;
class WiFiHardware {
public:
WiFiHardware() {};
void init() {
// do your initialization here. this probably includes TCP server/client setup
client.connect(server, 11411);
}
// read a byte from the serial port. -1 = failure
int read() {
// implement this method so that it reads a byte from the TCP connection and returns it
// you may return -1 is there is an error; for example if the TCP connection is not open
return client.read(); //will return -1 when it will works
}
// write data to the connection to ROS
void write(uint8_t* data, int length) {
// implement this so that it takes the arguments and writes or prints them to the TCP connection
for(int i=0; i<length; i++)
client.write(data[i]);
}
// returns milliseconds since start of program
unsigned long time() {
return millis(); // easy; did this one for you
}
};
int i;
void chatterCallback(const std_msgs::String& msg) {
i = atoi(msg.data);
}
std_msgs::String str_msg;
rosserial_arduino::Adc adc_msg;
ros::Publisher chatter("chatter", &str_msg);
ros::Publisher p("adc", &adc_msg);
ros::Subscriber<std_msgs::String> sub("message", &chatterCallback);
ros::NodeHandle_<WiFiHardware> nh;
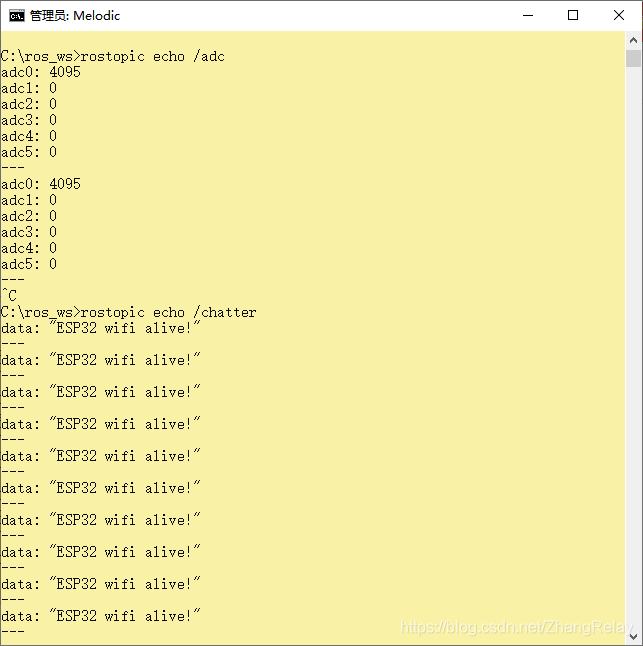
char hello[20] = "ESP32 wifi alive!";
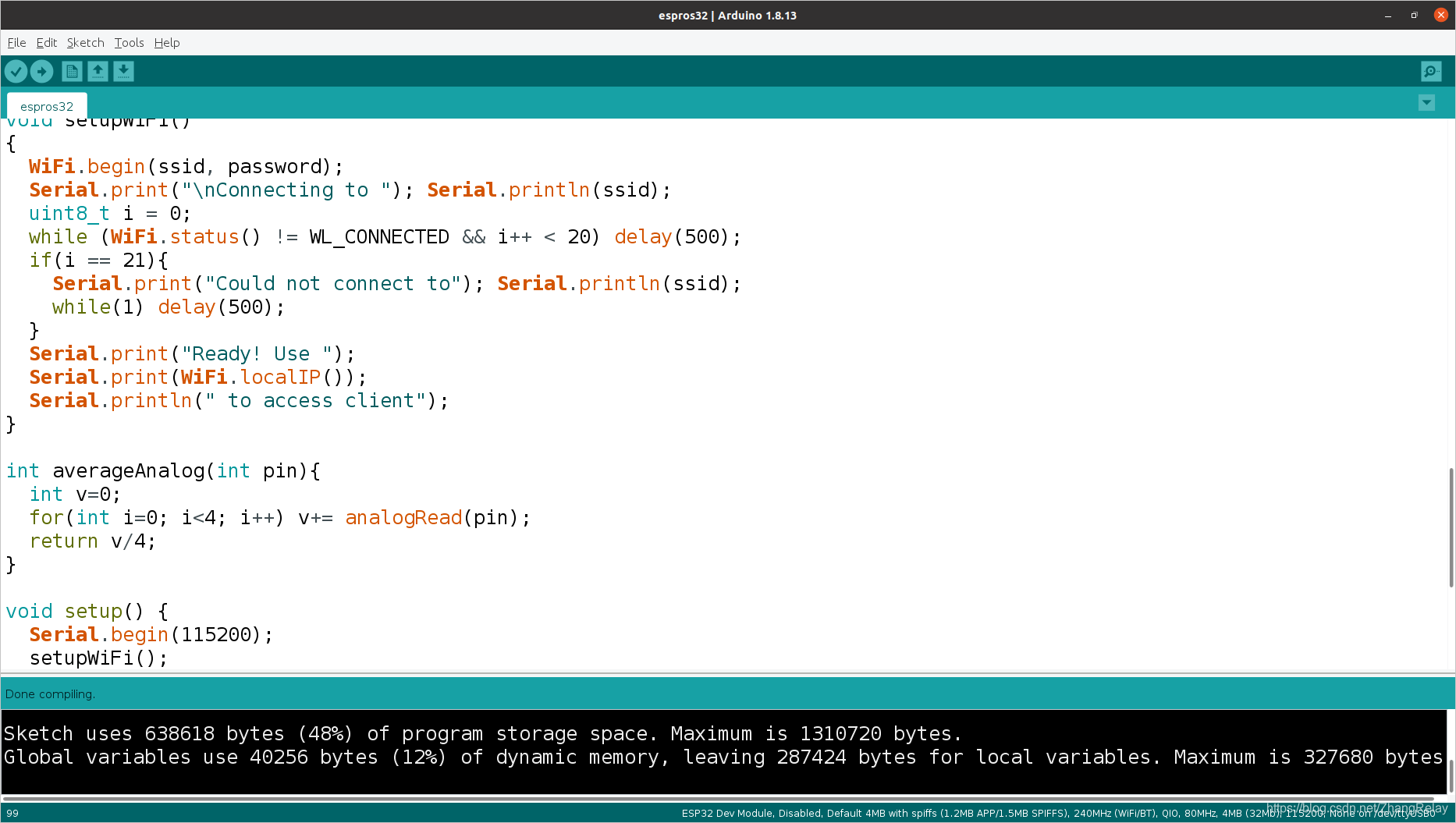
void setupWiFi()
{
WiFi.begin(ssid, password);
Serial.print("\nConnecting to "); Serial.println(ssid);
uint8_t i = 0;
while (WiFi.status() != WL_CONNECTED && i++ < 20) delay(500);
if(i == 21){
Serial.print("Could not connect to"); Serial.println(ssid);
while(1) delay(500);
}
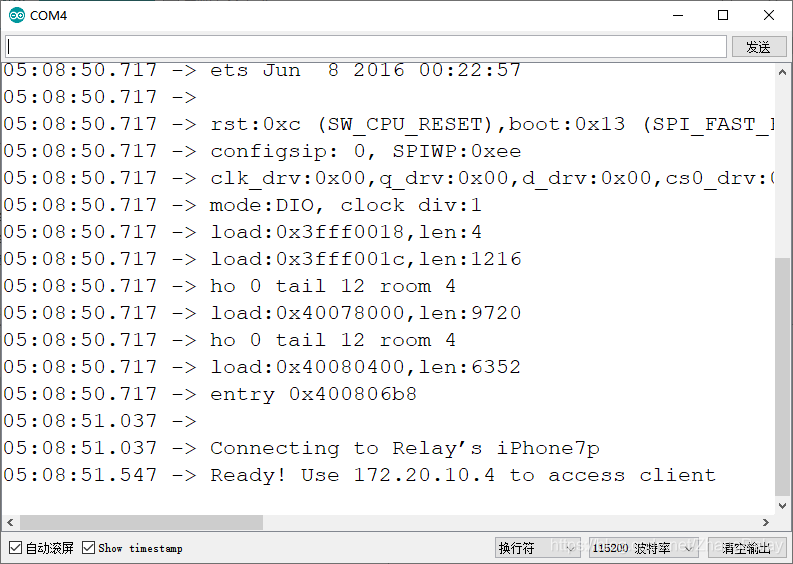
Serial.print("Ready! Use ");
Serial.print(WiFi.localIP());
Serial.println(" to access client");
}
int averageAnalog(int pin){
int v=0;
for(int i=0; i<4; i++) v+= analogRead(pin);
return v/4;
}
void setup() {
Serial.begin(115200);
setupWiFi();
delay(2000);
nh.initNode();
nh.advertise(chatter);
nh.subscribe(sub);
nh.advertise(p);
}
void loop() {
str_msg.data = hello;
chatter.publish( &str_msg );
adc_msg.adc0 = averageAnalog(0);
p.publish(&adc_msg);
nh.spinOnce();
delay(500);
}
主機端配置對應IP,
rosrun rosserial_python serial_node.py tcp
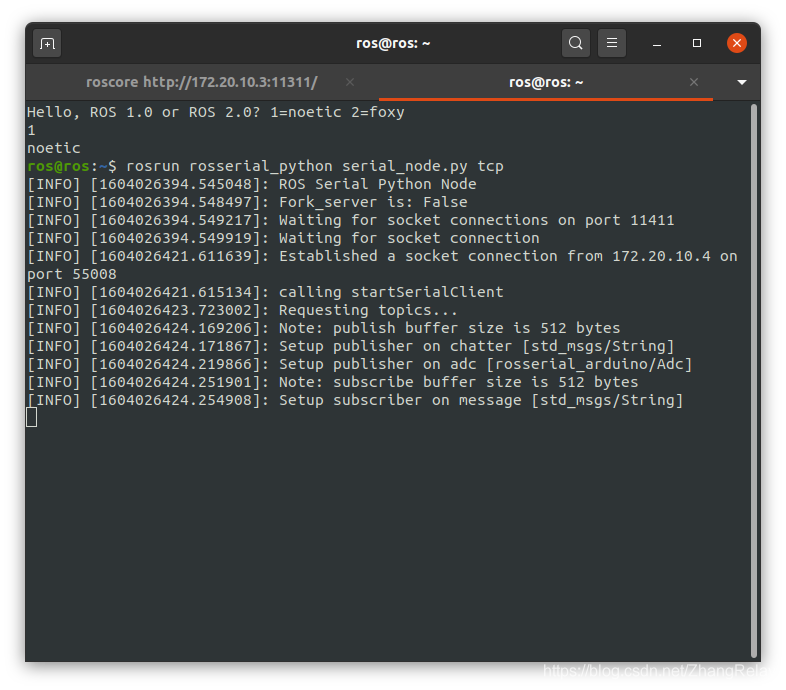
連接成功!!!
查看一下主題?
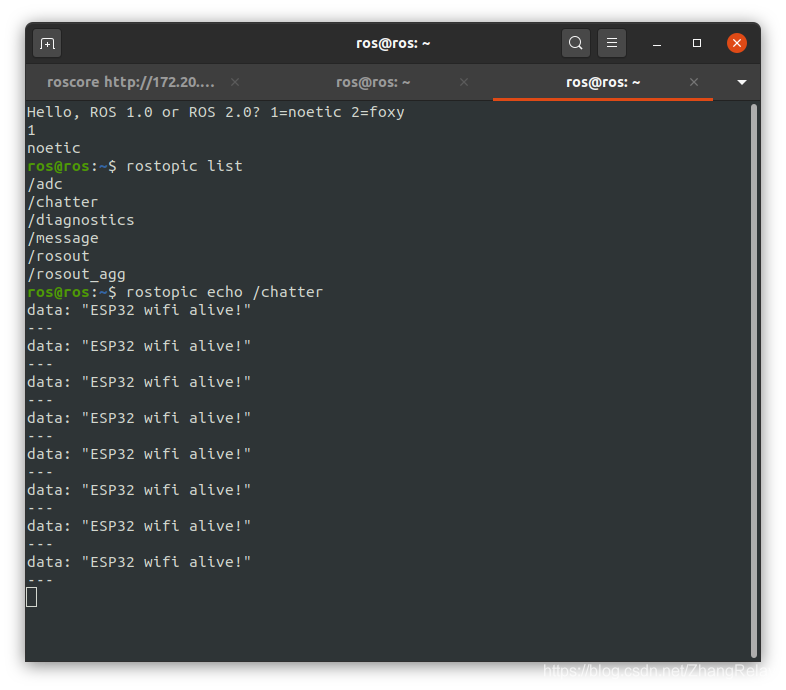
很愉快,一次成功,沒有遇到什么奇怪的問題,和8266幾乎一致,但是esp32性能強于8266,
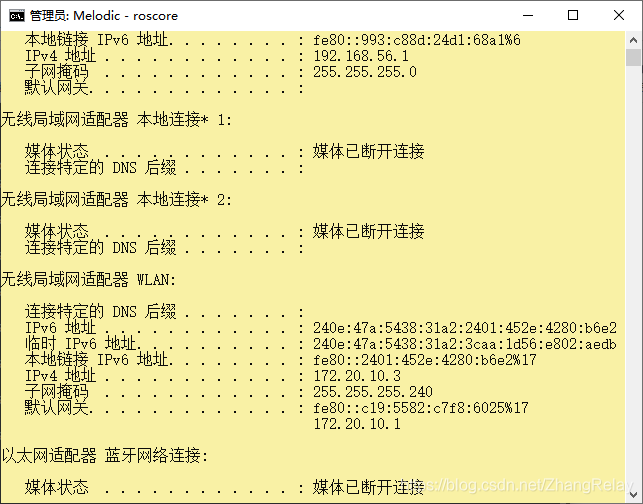
windows環境下測驗:
先看IP是否匹配,注意UART看串口號,wifi看IP,一定要正確才可以!
接著,直接用可以使用了,
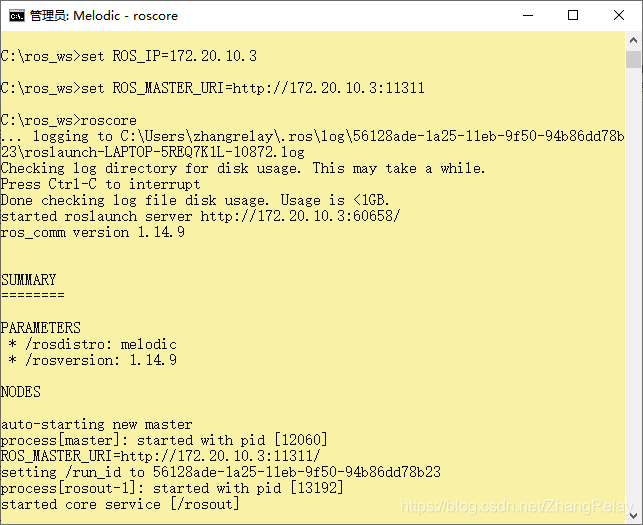
然后啟動,tcp節點:
rosrun rosserial_server socket_node tcp
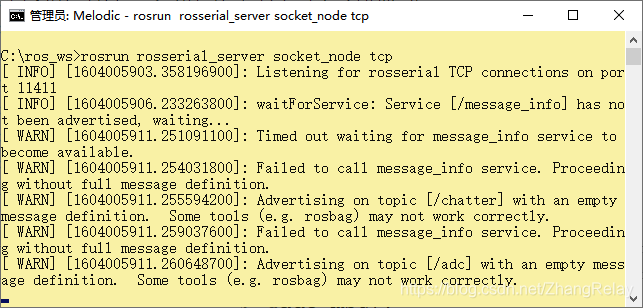
查看一下:
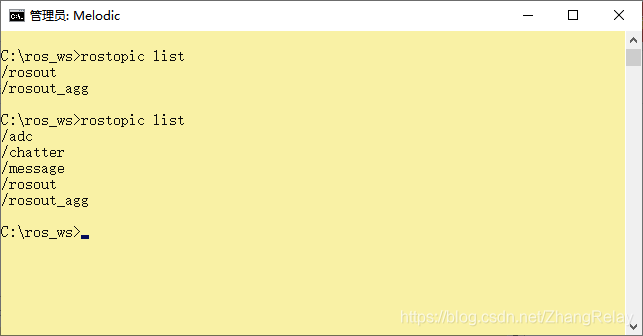
注意,如果配置不正確,無法看到/adc,/chatter,/message等主題哦,
支持ros版本(melodic,neotic),系統版本(linux,windows),已全部測驗均可以,
C:\ros_ws>set ROS_IP=172.20.10.3 C:\ros_ws>set ROS_MASTER_URI=http://172.20.10.3:11311 C:\ros_ws>roscore ... logging to C:\Users\zhangrelay\.ros\log\56128ade-1a25-11eb-9f50-94b86dd78b23\roslaunch-LAPTOP-5REQ7K1L-10872.log Checking log directory for disk usage. This may take a while. Press Ctrl-C to interrupt Done checking log file disk usage. Usage is <1GB. started roslaunch server http://172.20.10.3:60658/ ros_comm version 1.14.9 SUMMARY ======== PARAMETERS * /rosdistro: melodic * /rosversion: 1.14.9 NODES auto-starting new master process[master]: started with pid [12060] ROS_MASTER_URI=http://172.20.10.3:11311/ setting /run_id to 56128ade-1a25-11eb-9f50-94b86dd78b23 process[rosout-1]: started with pid [13192] started core service [/rosout] -fin-

 CSDN認證博客專家
不合格高校講師
CSDN認證博客專家
不合格高校講師
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/198704.html
標籤:其他
上一篇:C#利用套接字實作資料發送
下一篇:C#編程和網路編程入門