%把每個公式里的變數都放在1×417的矩陣里,把公式里的變數代換成 用矩陣和矩陣運算,這樣就避免回圈變數的問題,直接出來417種資料,缺點就是麻煩
function Orbit = readrinexG1(File,varargin)
if size(varargin,2)==1; Prn = varargin{1};else Prn = 1:36;end
Orbit.Prn = []; % Prn number
Orbit.Coord = []; % Cartesian coordinates, metres
Orbit.Time = []; % Times of coordinates, datenums
Orbit.Clock = []; % Satellite clock errors, microsec
Orbit.Sat = [];
Orbit = repmat(Orbit,1,length(Prn));
pi=3.1415926;
GM=3.986005*10^14;
for k = 1:size(File,1)
if exist(File(k,:),'file') %如果第k行存在“型別是file”的值
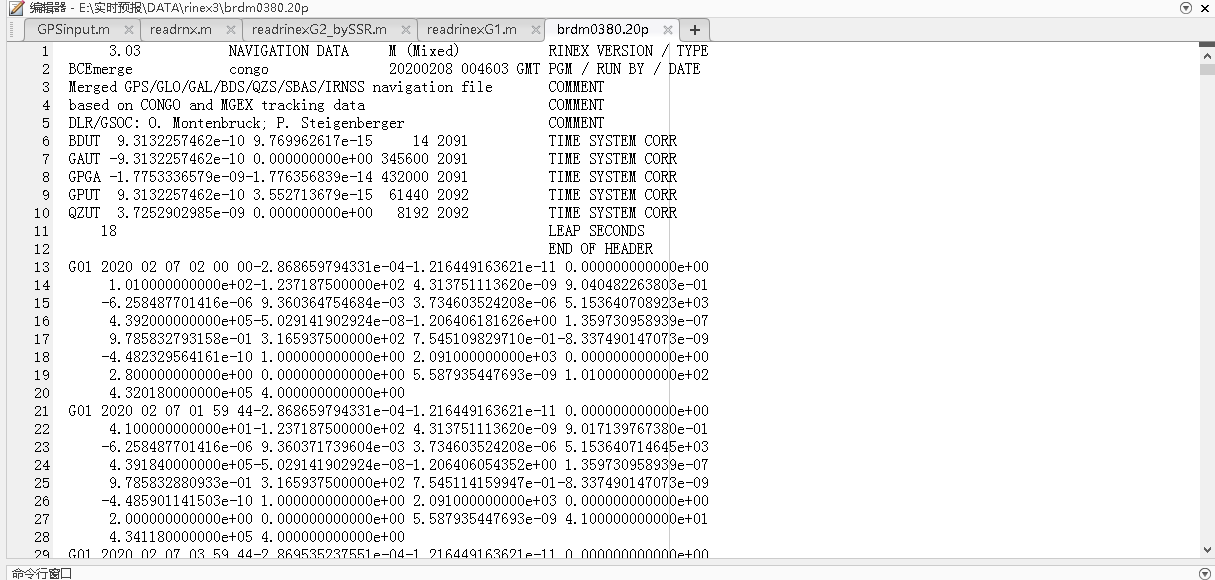
x = textread(File,'%s','delimiter','\n');
x = strvcat(x{:});
izero = find(x(1:end,1)=='G');
i=izero(4:end,1);
Time= datenum(str2num(x(i,5:23)));
Sat = str2num(x(i,2:3));
shu=numel(i);
%建立一個598行,每列元素是GM的矩陣
a=ones(shu,1);
a(a==1)=GM;
% 讀取第1行
year=str2num(x(i,5:8));
month=str2num(x(i,10:11));
day=str2num(x(i,13:14));
hour=str2num(x(i,16:17));
min=str2num(x(i,19:20));
sec=str2num(x(i,22:23));
%衛星鐘的偏差s,漂移s/s,漂移速度s/(s^2)
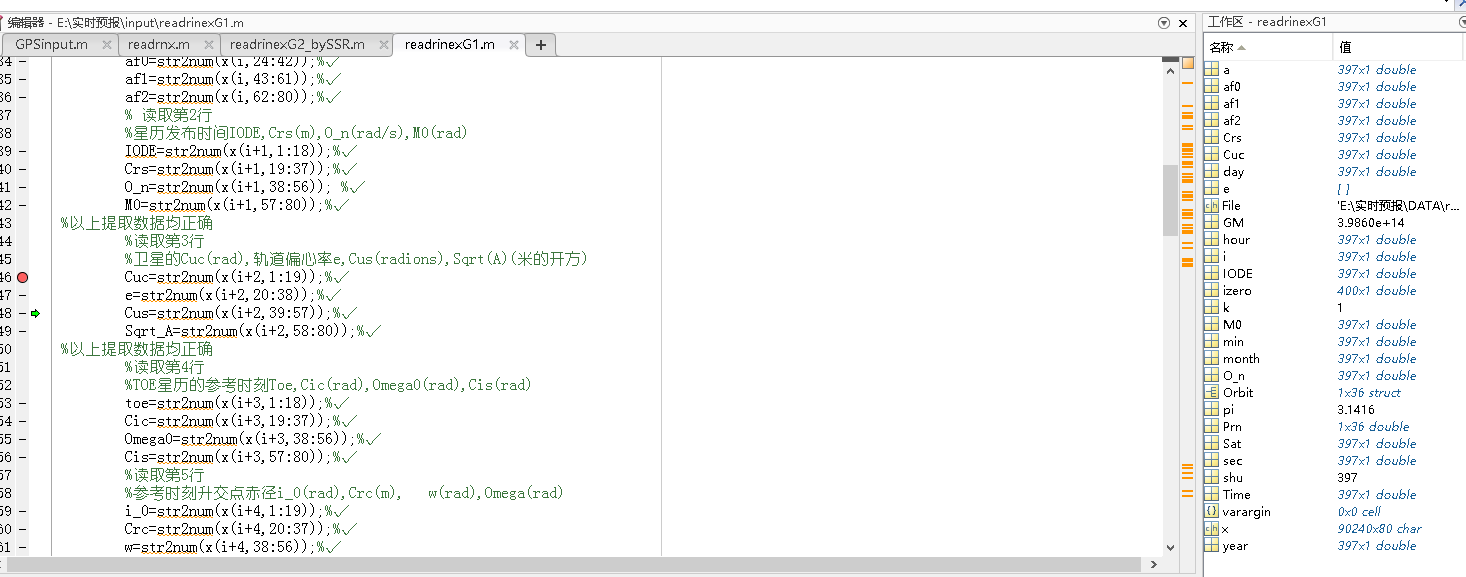
af0=str2num(x(i,24:42));%√
af1=str2num(x(i,43:61));%√
af2=str2num(x(i,62:80));%√
% 讀取第2行
%星歷發布時間IODE,Crs(m),O_n(rad/s),M0(rad)
IODE=str2num(x(i+1,1:18));%√
Crs=str2num(x(i+1,19:37));%√
O_n=str2num(x(i+1,38:56)); %√
M0=str2num(x(i+1,57:80));%√
%以上提取資料均正確
%讀取第3行
%衛星的Cuc(rad),軌道偏心率e,Cus(radions),Sqrt(A)(米的開方)
Cuc=str2num(x(i+2,1:19));%√
e=str2num(x(i+2,20:38));%√
Cus=str2num(x(i+2,39:57));%√
Sqrt_A=str2num(x(i+2,58:80));%√
%以上提取資料均正確
%讀取第4行
%TOE星歷的參考時刻Toe,Cic(rad),Omega0(rad),Cis(rad)
toe=str2num(x(i+3,1:18));%√
Cic=str2num(x(i+3,19:37));%√
Omega0=str2num(x(i+3,38:56));%√
Cis=str2num(x(i+3,57:80));%√
%讀取第5行
%參考時刻升交點赤徑i_0(rad),Crc(m), w(rad),Omega(rad)
i_0=str2num(x(i+4,1:19));%√
Crc=str2num(x(i+4,20:37));%√
w=str2num(x(i+4,38:56));%√
Omega=str2num(x(i+4,57:80));%√
%以上提取資料均正確
%讀取第6行
%軌道傾角變化率IDOT i(rad/s),L2上的碼cflgL2,PS周數weekno,L2—P碼資料標記pflgL2
IDOT_i=str2num(x(i+5,1:19));%√
% cflgL2=str2num(x(i+5,20:37));
weekno=str2num(x(i+5,39:57));%√
%以上提取資料均正確
%讀取第7行
%衛星精度Svac(m),衛星健康狀態Svhlth,TGD(sec),IODC鐘的資料齡期
Svac=str2num(x(i+6,1:19));%√
Svhlth=str2num(x(i+6,20:37));%√
TGD=str2num(x(i+6,39:57));%√
IDOC=str2num(x(i+6,58:80));%√
%以上提取資料均正確
%讀取第8行 這行沒用
%電文發送時刻Transmist,擬合區間h.
% Transmit(i)=str2num(line(4:22));
% % % 計算衛星坐標 % % %
%計算衛星平均角速度n
n=(sqrt(a)./(Sqrt_A.^3))+O_n;%√
%計算觀測瞬間衛星的平近點角M
ut=hour+(min/60)+(sec/3600);%先將民用日的時分秒化為實數時%√
% if month<=2
% year=year-1;
% month=month+12;
% else
% year=year;
% month=month;
% end
% if month(i)<=2
% y(i)=year(i)-1;
% m(i)=month(i)+12;
% else
% y(i)=year(i);
% m(i)=month(i);
% end
jd=fix(365.25*year)+fix(30.6001*(month+1))+day+(ut/24)+1720981.5;%將民用日的年月日轉換成儒略日%√
% weekgps(i)=int((jd(i)-2444244.5)/7);
weeksec=(jd-2444244.5-weekno*7)*24*3600; %√
tk=weeksec-toe;%?????
deltat=af0+af1.*tk+af2.*tk.^2;%????
tk=tk+deltat; %?????
sdf=find(tk>302400);%√
tk(sdf,:)=tk(sdf,:)-604800;%√
sdf1=find(tk<-302400); %√
tk(sdf1,:)=tk(sdf1,:)+604800;%√
M=M0+n.*tk;%√
% % 計算偏近點角
E_temp=M;%√
d_E=1;%√
while(abs(d_E)<1e-15) %?????
E_temp_next=M+e.*sin(E_temp);%?????
d_E=E_temp_next-E_temp;%?????
E_temp=E_temp_next;%?????
end
E=E_temp;
V=atan2(sqrt(1-e.*e).*sin(E),(cos(E)-e));%√
%計算升交距u
u=V+w;
%計算攝動改正項
SigmaU=Cuc.*cos(2*u)+Cus.*sin(2*u);
SigmaR=Crc.*cos(2*u)+Crs.*sin(2*u);
SigmaI=Cic.*cos(2*u)+Cis.*sin(2*u);
%對u,r,i,進行攝動改正
u=u+SigmaU;
a=(Sqrt_A).^2;
r=a.*(1-e.*cos(E))+SigmaR;
I=i_0+SigmaI+IDOT_i.*tk;
%計算衛星在軌道坐標系中的位置
x0=r.*cos(u);
y0=r.*sin(u);
% xy(1,ii)=x0;
% xy(2,ii)=y0;
%計算觀測瞬間升交點的經度L
we1=7.29211567*10^(-5);%地球自轉角速度
we=ones(shu,1);
we(we==1)=we1;
L=Omega0+(Omega-we).*tk-we.*toe;
%計算衛星在瞬時地球坐標系中的位置
%XYZ=struct(i'X',NaN,'Y',NaN,'Z',NaN);
X=x0.*cos(L)-y0.*cos(I).*sin(L);
Y=x0.*sin(L)+y0.*cos(I).*cos(L);
Z=y0.*sin(I);
Pos=[X Y Z];
for i = 1:length(Prn)
Orbit(i).Prn = Prn(i);
Orbit(i).Time = [Orbit(i).Time ;Time(find(Sat==Prn(i)),:)];
Orbit(i).Coord = [Orbit(i).Coord ;Pos(find(Sat==Prn(i)),:)];
% Orbit(i).Clock = [Orbit(i).Clock ;Clk(find(Sat==Prn(i)),:)];
Orbit(i).Sat = [Orbit(i).Sat ;Sat(find(Sat==Prn(i)),:)];
end
else fprintf('Warning from ning: %s not found\n',File(k,:)); end
end
%因為有時間重復的時候,所以后面Coord資料也有重復的,后面程式自動洗掉重復的數
% 所以原本20個資料,結果為11個,剩下九個是重復的
for i = 1:length(Orbit)
if ~isempty(Orbit(i).Coord)
[t,j] = unique(round(Orbit(i).Time*24*60));
% [t,j] = unique(round(Orbit(i).Time));
Orbit(i).Time = Orbit(i).Time(j);
Orbit(i).Coord = Orbit(i).Coord(j,:);
% Orbit(i).Clock = Orbit(i).Clock(j);
end
end
uj5u.com熱心網友回復:
在斷點處 讀取不到 20-38字符 讀取不到 小 e 矩陣轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/202807.html
標籤:其他開發語言
下一篇:使用LIME解釋黑盒ML模型