基于STM32的UART通信學習-小白專屬
- 通信介面背景知識
- 通信方式
- 并行通信
- 串行通信
- 串行通信
- 資料傳輸方向:
- 通信方式:
- STM32串口通信基礎
- UART異步通信方式引腳連接方法
- UART異步通信方式特點
- 串口通信程序
- STM32中UART通信需要定義的引數
-Lxy
通信介面背景知識
通信方式
并行通信
- 資料各個位同時傳輸
- 速度快但是占用引腳多
串行通信
- 資料按位一個一個傳輸
- 速度慢但是占用引腳少
串行通信
資料傳輸方向:
a. 單工——資料沿一根線從左到右
b. 半雙工——資料沿一根線從左到右或者從右到左,某一時刻方向確定
c. 全雙工——兩個單工通信,需要兩根線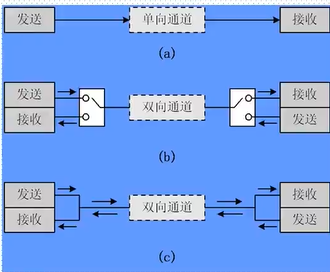
通信方式:
- 同步通信:帶有時鐘脈沖信號
-SPI、IIC - 異步通信:不帶時鐘脈沖信號
-UART(通用異步收發器)
(USART:通用同步異步收發器)
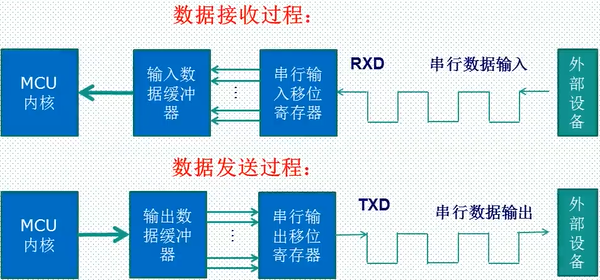
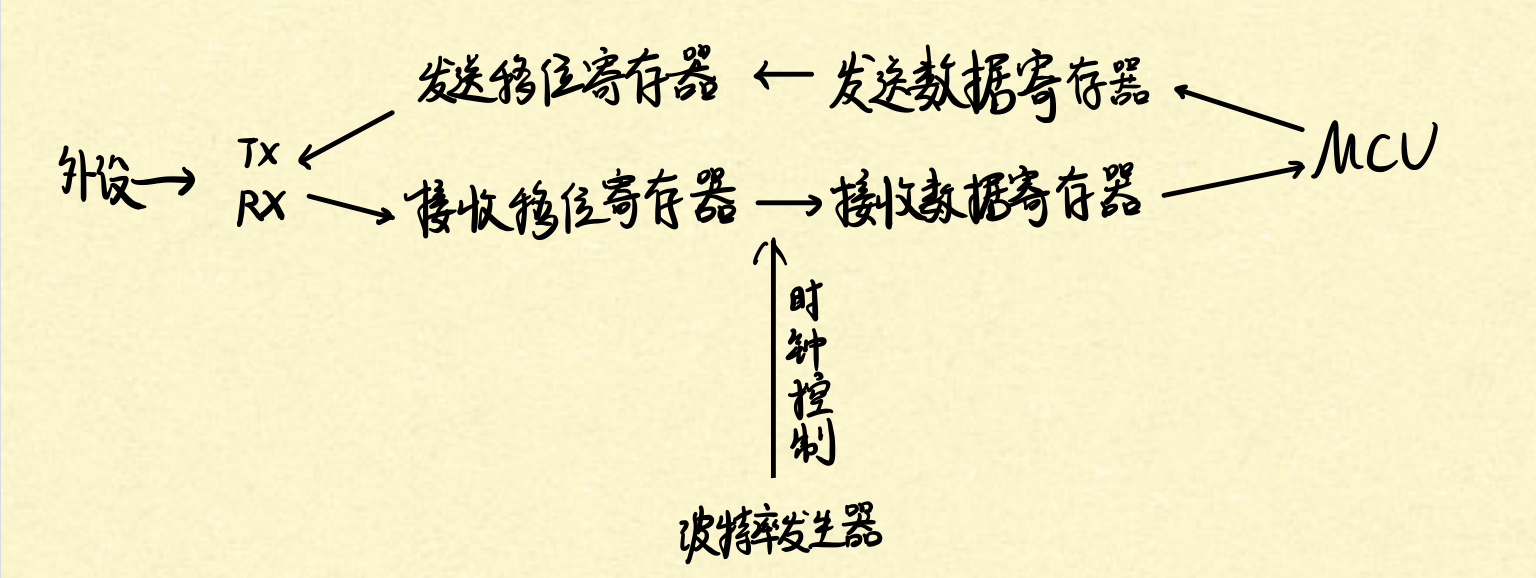
STM32串口通信基礎
UART異步通信方式引腳連接方法
RXD:資料輸入
TXD:資料發送
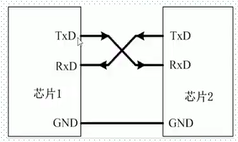
圖.UART線路連接方式
UART異步通信方式特點
- 全雙工異步通信
- 分數波特率發生器(即分頻可可以至小數,更精確),最高達4.5Mbits/s
- 數字位8位9位任選
- 停止位1位2位任選
- 多個狀態標志
- 多個帶標志的中斷源
串口通信程序
STM32中UART通信需要定義的引數
- 起始位
- 資料位
- 奇偶校驗位(以偶校驗舉例,當資料中1的個束為奇數個時,校驗位為1,湊夠偶數個1;反之為0,)
- 停止位
- 波特率設定
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/232520.html
標籤:其他