影像分割
- 總覽
- 分割方法
- 基于聚類的影像分割 (Clustering-based Image Segmentation)
- 不同的簇化策略(grouping strategies)
- 閾值化
- 啟發式方法
- Otsu's method
- 資料聚類演算法
- K-means 聚化演算法
- 優點
- 缺點
- 均值移動分割 (Mean Shift Segmentation)
- 優點
- 缺點
- 其他分割方法
- 基于區域方法: 拆分和合并(region-based method: split and merge)
- 基于圖的方法:NCut (Graph-based Method)
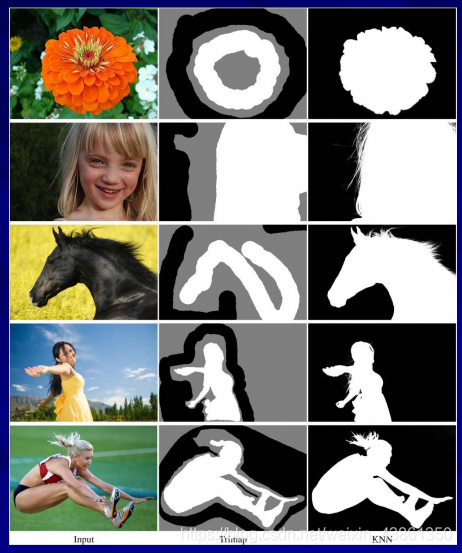
- 影像遮罩 (Image Matting)
- 語意分割 (Semantic Segmentation)
- 實體分割 (Instance Segmentation)
- 影像分割后期處理 (Post Processing for Image Segmentation)
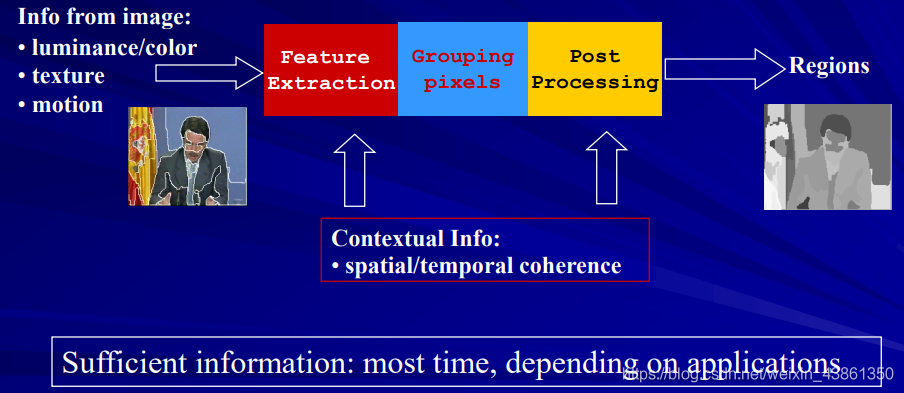
總覽
影像分割目的:將屬于同一物件的像素分組到一起,

分割被定義為將影像分解為分段(segments),區域(region)或者物件(object)的程序:
- 在使用分割輸出的環境中,分割是有意義的,
- 當應用程式中的興趣部分(segments of interest)已經被分割出來時,程式停止,
- 區域分割 (region segmentation) vs 語意分割 (segmentic segmentation),
分段通常是不重疊 (non-overlapping) 的,
分段中的像素: 通常是具有相似的視覺特性(visual properties),在空間上相連,屬于同一物件,
視覺特性: 可衡量特征,包括像素強度或顏色,邊緣,紋理(texture),運動,深度,
分割方法
- 基于輪廓 (contour-based): 也成為基于邊緣,檢測線段之間的邊緣并線段的閉合輪廓(closed contours),
- 基于聚類 (clustering-based): 閾值化,將具有相似視覺特性的所有像素組合在一起,
- 邊緣/輪廓 和 聚類的結合,
- 基于深度學習進行分割,
基于聚類的影像分割 (Clustering-based Image Segmentation)
將像素分組為K個簇,如:
- 簇內的像素比與其他簇的像素具有更多相似性,
- 不考慮空間連通性(spatial connectivity),
不同的簇化策略(grouping strategies)
- 閾值化(thresholding): 若特征能被認為是一組獨立的標量,
- 聚集集群(agglomerative clustering): 從單獨的簇中的每個點開始,在每次迭代中,合并兩個“最近”的簇,
- 分裂集群(Divisive Clustering): 首先將所有的點分組到一個大的簇中,在每次迭代時,拆分“最大”的簇,
閾值化
下圖左邊影像 250 x 250,由黑色(0)和白色(255)組成,右邊是像素直方圖,可以看到白點和黑點的總數差不多,都在30000以上,
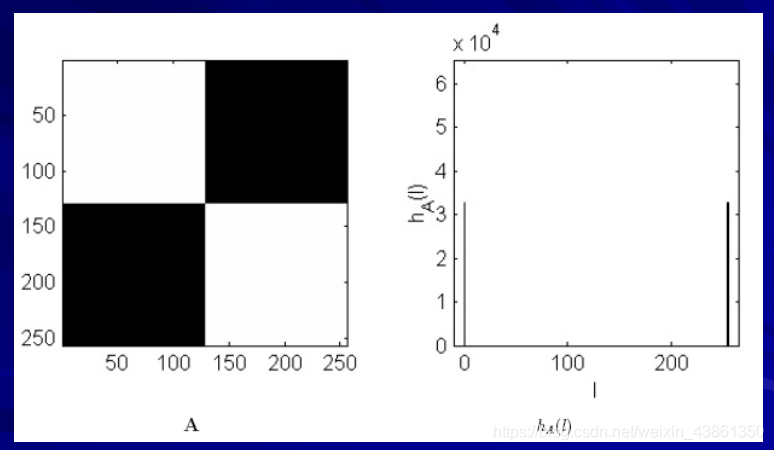
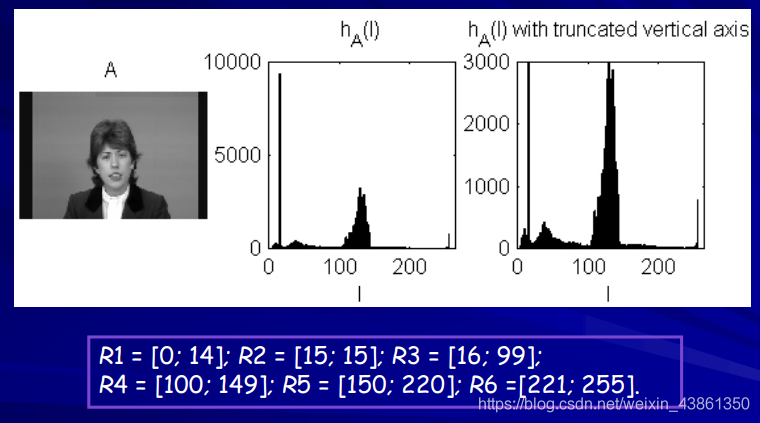
如圖 R1~R6 為所選閾值,
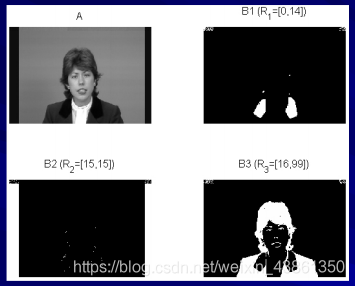
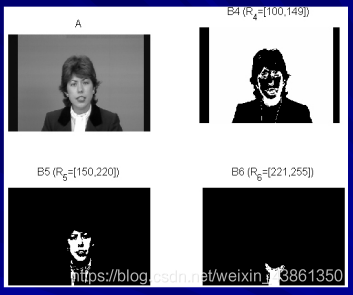
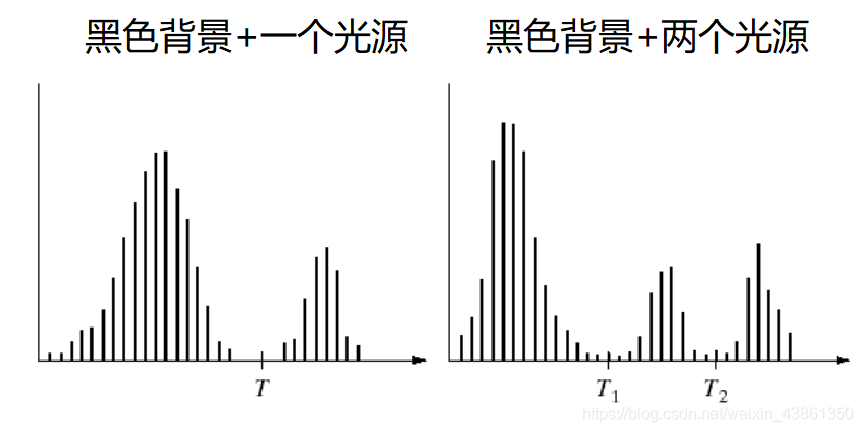
閾值的選擇是一個廣泛研究的問題,沒有最佳的解決方案(optimal solution),基于直方圖的方法(Histogram based approaches): 互動性閾值(Interactive threshold) ,可以通過直觀觀察直方圖確定閾值,當然,我們希望整個程序自動化,因此可以使用啟發式(Heuristic)方法,最小化方法(Minimisation methods): Otsu’s method,
啟發式方法
- 選擇初始估計的T值 (最大和最小灰度值的中間值)
- 將像素根據其像素強度 分類到 強度大于T的簇G1 以及 強度小于T的簇G2中,
- 計算兩個組平均的μ1和μ2,
- 接著,獲得新的T = 1/2(μ1 + μ2)
- 如果新的T和舊的T差別還很大,則回傳步驟 2 再次進行,
Otsu’s method
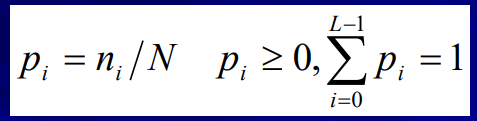
- 計算歸一化的直方圖
- 選擇閾值k,將像素點分為C0和C1,μi 指 Ci 的 平均值,其中 i = 0, 1,
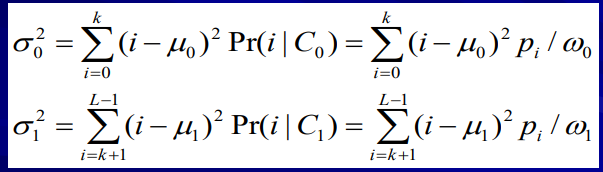
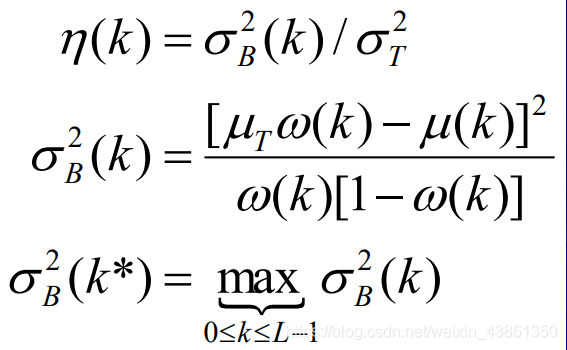
- 驗證方法,計算類內方差(within-class variance σ2W)或類間方差(between-class variance σ2B)
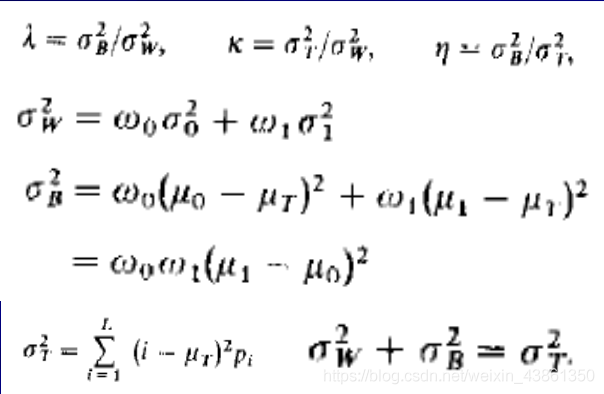
- 從閾值k = 0開始運行到閾值k = 255,選擇能讓類內方差最小以及類間方差最大化的k值,
注:Otsu’s方法僅限于兩個簇或者一個閾值的情況,
資料聚類演算法
K-means 聚化演算法
K-means演算法詳解
K-medoids演算法:與K-mean類似,僅聚類中心無法通過平均來計算,其中,每個簇的“中心”是該簇中位于最中心的點(即與其他點平均距離最小的點),
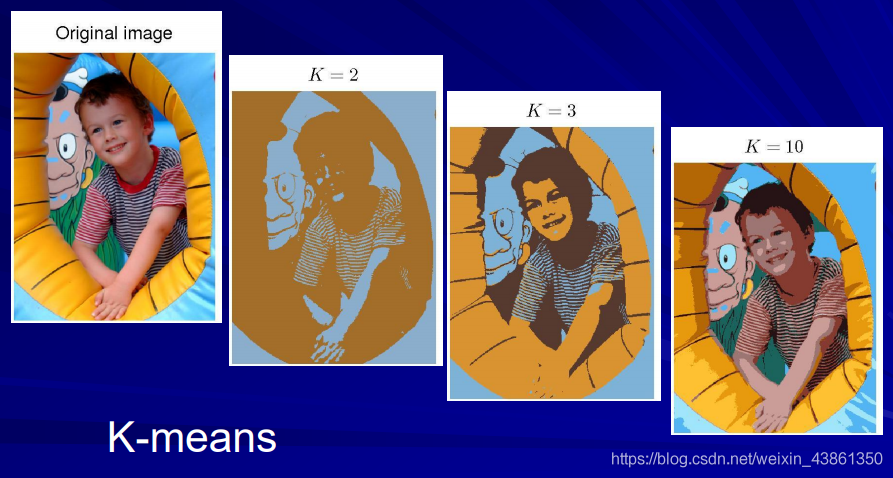

基于強度或者顏色的K-mean聚類,簇不必在空間上保持連貫 (spatially coherent),
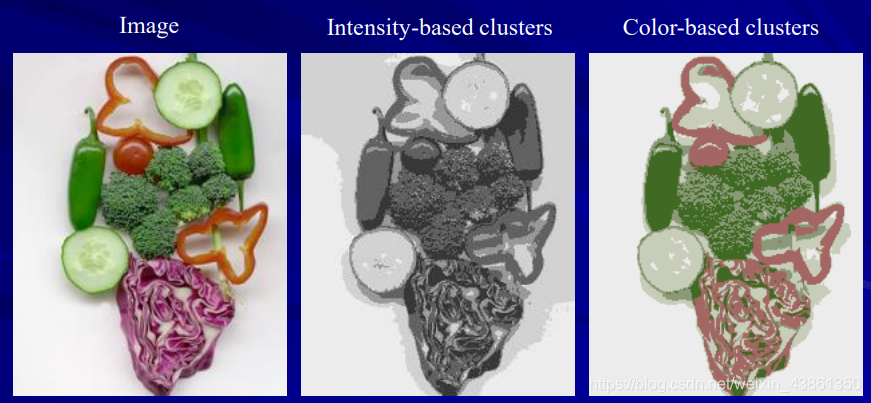
基于(r, g, b, x, y)值的聚類可以增強空間一致性(spatial coherent),

優點
簡單又快速,且能夠收斂到誤差函式(error function)的區域最小值,
缺點
需要自行選擇k值,對初始值敏感,對例外值 (outliars) 敏感,且其傾向于找"球形"簇(spherical clusters),
均值移動分割 (Mean Shift Segmentation)
先進且通用的基于聚類的分割技術,‘
均值移動分割演算法尋求給定分布的密度的眾數(mode)或區域最大值(local maximum),
- 選擇搜索視窗 search window (寬度和位置)
- 計算搜索視窗中資料的平均值,
- 將搜索視窗居中于新的平均位置 (mean location),
- 重復直到收斂,
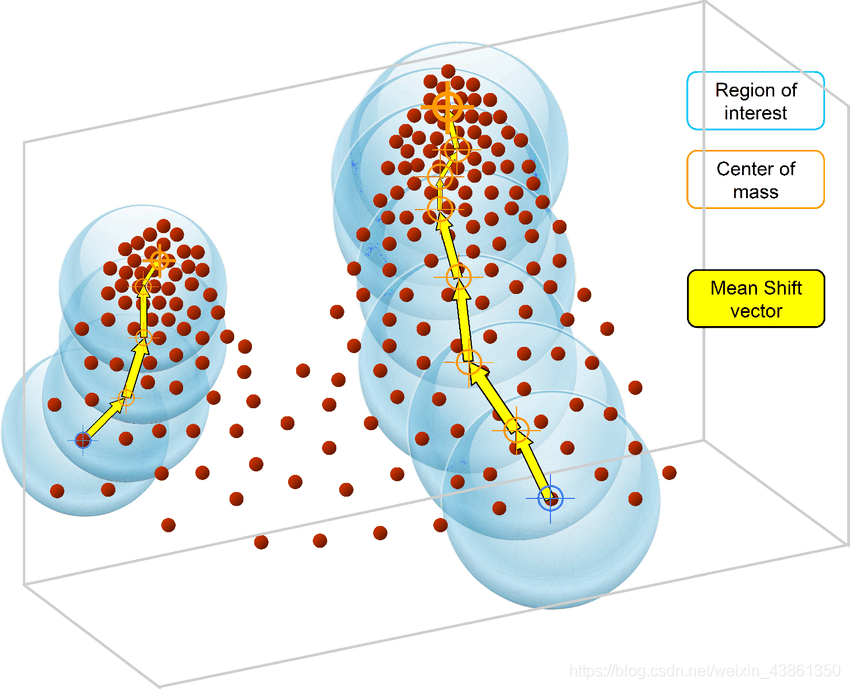
簇:在模式吸引力盆(attraction basin of a mode)中的所有資料點,
吸引力盆地 (attraction basin):所有軌跡(trajectories)都通向同一模式的區域
- 查找特征 (顏色,梯度,紋理等)
- 在各個像素位置初始化視窗,
- 對每個視窗執行均值移動直到收斂,
- 合并具有相同"峰值"或模式的視窗,
優點
- 不假設球形簇,
- 僅需要選擇一個引數 - 視窗大小(window size),
- 查找可變數量的模式(variable number of mode),
- 對例外值的穩健性,
缺點
- 輸出取決于視窗大小,
- 計算昂貴,
- 在特征空間的維度(dimension of feature space)上無法很好地縮放,
其他分割方法
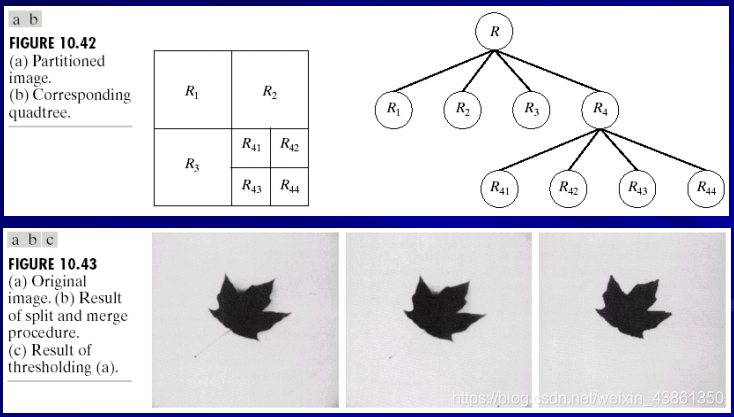
基于區域方法: 拆分和合并(region-based method: split and merge)
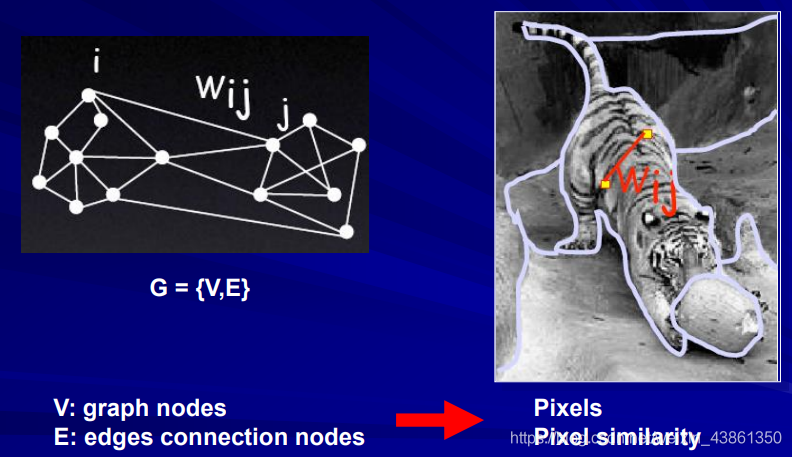
基于圖的方法:NCut (Graph-based Method)
影像遮罩 (Image Matting)
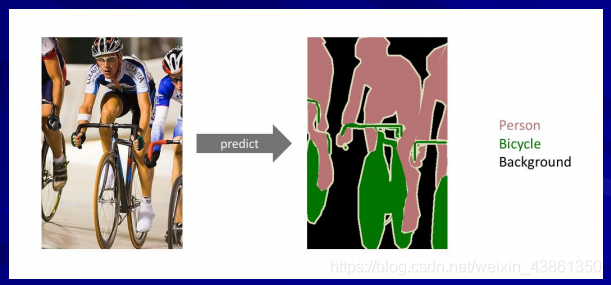
語意分割 (Semantic Segmentation)
語意分割將影像的像素分為語意上有意義的物件 (semantically meaningful objects) 的程序,其將每個像素與類別或語意標簽 semantic label (例如 花,人,道路,天空,海洋或汽車等)相關聯,
實體分割 (Instance Segmentation)
對感興趣物件的像素進行分類和定位的程序,

影像分割后期處理 (Post Processing for Image Segmentation)
- 二元形態學過濾 (Binary Morphological Filters)
- 多數投票 (Majority voting): 看分類后標簽附近的其他標簽,若都為同一個數,則當前標簽也被改成這個數 (5 x 5, 7 x 7的區域),
這些后期處理都用于降噪,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/232640.html
標籤:AI
上一篇:打破科研人員成長道路的思維定勢
下一篇:【飛槳PaddlePaddle】四天搞懂生成對抗網路(二)——風格遷移的“精神始祖”Conditional GAN