| 日期 | 作者 | 版本 | 說明 |
|---|---|---|---|
| 2020.12.16 | Mr.Zheng | V1.1 | 基于PID控溫的第一次說明 |
目錄
- 前言
- 一、PID是什么?它有哪些優點
- 二、PID控溫中各引數的作用,如何調節
- 1.需要用到的引數說明
- 2.PID控溫曲線示意圖解
- 3.控溫七種引數優缺點與數值設定要求
- 總結
前言
對許多工控系統來講,控溫精度越高,越能搶占產品市場,那么我們在設計邏輯的時候經常會用到的是PID控溫校準程序,下面我將完全從實戰經驗入手,詳細講解PID控溫的優點、PID控溫中各引數的作用、如何調節PID引數實體,一、PID是什么?它有哪些優點
PID是比例-積分-微分控制器,易于設計,直到現在依然是業內應用最多最廣的控制器,編程實作PID調節不難,難點在于引數調節校準上,二、PID控溫中各引數的作用,如何調節
1.需要用到的引數說明
控溫使用了加熱和制冷機,下文分別叫做加熱器和壓碩訓(半導體制冷片不常用,用壓碩訓);
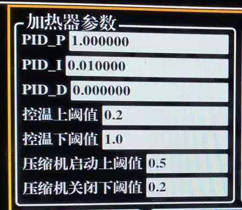
加熱器(功率可控)五個引數:P,I,D,上閾值,下閾值;
壓碩訓(功率不可控)兩個引數:上閾值,下閾值;
2.PID控溫曲線示意圖解
PID控溫曲線圖
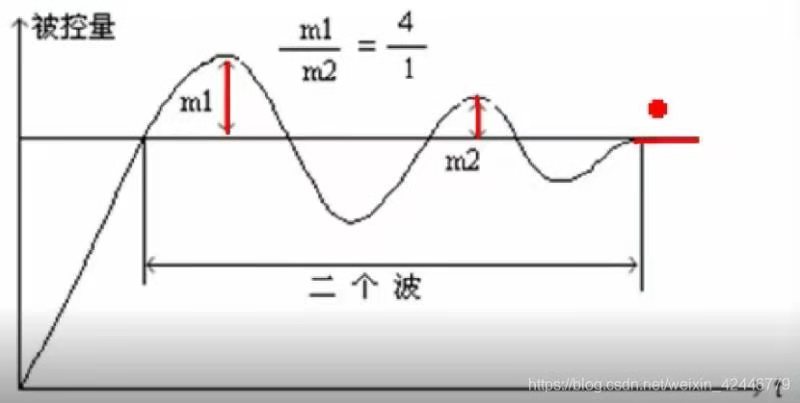 第一段波段,加熱器打開,超過控溫上閾值時,加熱器關閉,若超過壓碩訓上閾值,壓碩訓啟動,溫度緩慢下降;
第一段波段,加熱器打開,超過控溫上閾值時,加熱器關閉,若超過壓碩訓上閾值,壓碩訓啟動,溫度緩慢下降;
第二段波段,溫度下降到壓碩訓下閾值時,壓碩訓關閉,停止制冷,溫度降到控溫下閾值時,加熱器打開,溫度回升,接到第一波段升溫回呼程序,周期往復控溫;
因為有P,I,D的調節,控溫程序的波動會越來越小,慢慢達到一個控溫的穩態波動區,這個時候的理想情況就是上限不超過設定溫度+0.5,下限不低于設定溫度-0.5,
3.控溫七種引數優缺點與數值設定要求
| 引數 | 說明 | 缺點 | 要求 |
|---|---|---|---|
| 加熱器P | 比例系數,P越大,加速度越大,從零開始上升曲線越陡,加熱速度越快 | P太大容易加熱過沖超調形成m1那個上升波段:P太小上不去設定溫度,只會很接近 | P理論上應該小點,減弱過沖效應,但是不能太小,太小的話上升會非常緩慢,所以設定區間為1-0.1,具體數值測驗看什么情況下過沖小且加熱速度不算慢 |
| 加熱器I | 積分引數,理論上無過沖情況下曲線會無限接近于設定溫度而不會超過此設定溫度,這時候積分引數就起作用了,他的作用:根據時間流逝不斷積累功率令其最侄訓累到突破設定溫度 | 太大的話,它會引起偽過沖,積累時間太短就超過了設定溫度:太小的話,積累過慢,PID控溫穩定耗時就太久了 | I實際情況最好賦值區間0.01到0.005 |
| 加熱器D | 微分控制器引數,影響曲線穩定程序的抖動特性 | 本次PID控溫暫不要求使用 | 寫零即可 |
| 加熱器上閾值 | 加熱器加熱程序,當溫度超上閾值時,關閉加熱器 | 沒有缺點,盡量調這個,在壓碩訓沒啟動的時候就讓加熱器關閉 | 第一次可設成0.2,設小點早點關閉加熱器 |
| 加熱器下閾值 | 沒打開加熱器的時候,溫度下降到下閾值時,加熱器啟動開始加熱 | 沒有缺點,環境溫度低就把這個調小點,讓加熱器多作業 | 第一次可設成1,這個是讓加熱器啟動的閾值 |
| 壓碩訓上閾值 | 升溫程序壓碩訓沒開,升溫升到上閾值后,壓碩訓打開,開始制冷 | 因為壓碩訓功率不能調,所以在正常情況下,盡量調加熱器,避免壓碩訓的啟動! | 第一次可設成0.4,設大點避免頻繁啟動壓碩訓 |
| 壓碩訓下閾值 | 壓碩訓開啟著的時候,溫度下降,降到下閾值才會關閉壓碩訓 | 因為壓碩訓功率不能調,所以在正常情況下,盡量調加熱器,避免壓碩訓的啟動! | 第一次可設成0.4,設小點能讓壓碩訓早點關閉防止溫度降得太快超調 |
總結
PID控溫引數調節,最優先考慮的應該是加熱器的五個引數調節,優先調整加熱器資料,重點調整P與控溫上閾值下閾值;對于壓碩訓的調節,應該盡量避免壓碩訓啟動,上閾值設大點,下閾值設小點, 不同作業環境溫度下的PID引數調節可能有所不同,盡量確保溫度波動范圍在±0.5℃內,轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/236115.html
標籤:其他
上一篇:和風天氣更新資料失敗原因分析