1.前言
為嘛要寫上篇,因為今天是2020年最后一天了,晚上部門聚餐,晚上都沒機會加班了,想在寫完本篇博客再學下資料結構,因此本章純屬入門內容,讓讀者看完之后能把CAN給通起來
因為我在學習程序中也查了很多資料,基本都是這里截個圖,那里抄一點,有人把原子的教程搬上來拿到幾百個收藏,然而這些教程都是可能給了某個型號單片機的代碼,而沒有通用型的文章,并且各種暫存器讓人望而生畏,我在跑通幾個板子時候特別難受,特此寫下本文,
2.CAN簡介
CAN的作用,大多依賴于他的優點,一個總線控制多個設備、速度快等,適用于汽車控制系統,其他資料網上已經有很多了,本節不再贅述,
3.預期結果
本次實驗目的是讓一個板子發送資訊,另外兩個板子可以接收資訊,
發送方為:C8T6(中容量,后面簡稱小板)
接收方為:C8T6、ZET6(高容量,后面簡稱大板)
發送方小板發送8個位元組資料,初始化8個位元組的canbuffer整型陣列,每次發送時候都把canbuffer[0]加1,這樣能發送動態資料,像原子的can例程里面8個都變化,需要一個for回圈,這里從簡操作,改變一個數就可以了,
接收方,大板因為有螢屏,讓接收的數字直接顯示在螢屏上就可以了,小板通過DeBug除錯查看接收快取,
4.三個板子連接
我最初拿到小板發現他的can口有三個排針,以為需要接地,后來看到can相關檔案發現只需要CANH、CANL連接就可以了,
CANH、CANL并接就可以了,不需要其他線,原理如下
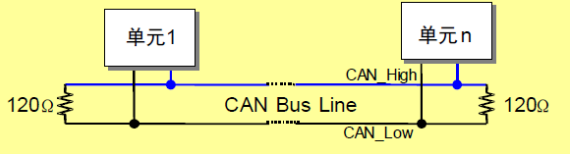
最開始總是通信不成功,一直以為是接地什么的原因,后來兩個小板通信成功直接把接地線剪掉發現沒影響哈哈,
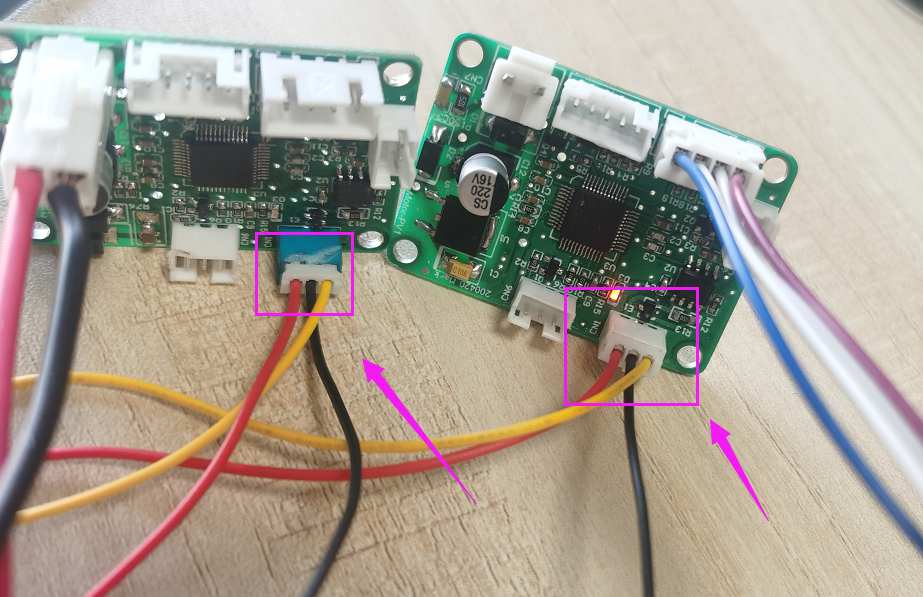
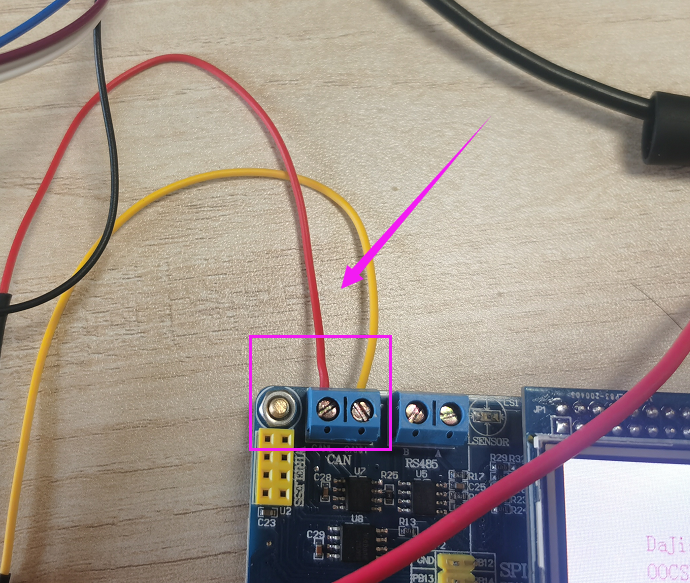
連接如下圖(黃色線CANH、紅色線CANL):
5.CAN初始化
查看中容量和大容量發現他們的can通信的GPIO口都是PA11、PA12,并且沒有重映射,因此在初始化配置時候用一樣的配置就可以了,就是直接把can.c和can.h直接復制過去,(所謂通用)
如下所示代碼
u8 CAN_Mode_Init(u8 tsjw,u8 tbs2,u8 tbs1,u16 brp,u8 mode)
{
GPIO_InitTypeDef GPIO_InitStructure;
CAN_InitTypeDef CAN_InitStructure;
CAN_FilterInitTypeDef CAN_FilterInitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);//使能PORTA時鐘
RCC_APB1PeriphClockCmd(RCC_APB1Periph_CAN1, ENABLE);//使能CAN1時鐘
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //復用推挽
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化IO
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//上拉輸入
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化IO
//CAN單元設定
CAN_InitStructure.CAN_TTCM=DISABLE; //非時間觸發通信模式 //
CAN_InitStructure.CAN_ABOM=DISABLE; //軟體自動離線管理 //
CAN_InitStructure.CAN_AWUM=DISABLE; //睡眠模式通過軟體喚醒(清除CAN->MCR的SLEEP位)//
CAN_InitStructure.CAN_NART=ENABLE; //禁止報文自動傳送 //
CAN_InitStructure.CAN_RFLM=DISABLE; //報文不鎖定,新的覆寫舊的 //
CAN_InitStructure.CAN_TXFP=DISABLE; //優先級由報文識別符號決定 //
CAN_InitStructure.CAN_Mode= mode; //模式設定: mode:0,普通模式;1,回環模式; //
//設定波特率
CAN_InitStructure.CAN_SJW=tsjw; //重新同步跳躍寬度(Tsjw)為tsjw+1個時間單位 CAN_SJW_1tq CAN_SJW_2tq CAN_SJW_3tq CAN_SJW_4tq
CAN_InitStructure.CAN_BS1=tbs1; //Tbs1=tbs1+1個時間單位CAN_BS1_1tq ~CAN_BS1_16tq
CAN_InitStructure.CAN_BS2=tbs2;//Tbs2=tbs2+1個時間單位CAN_BS2_1tq ~ CAN_BS2_8tq
CAN_InitStructure.CAN_Prescaler=brp; //分頻系數(Fdiv)為brp+1 //
CAN_Init(CAN1, &CAN_InitStructure); // 初始化CAN1
CAN_FilterInitStructure.CAN_FilterNumber=0; //過濾器0
CAN_FilterInitStructure.CAN_FilterMode=CAN_FilterMode_IdMask;
CAN_FilterInitStructure.CAN_FilterScale=CAN_FilterScale_32bit; //32位
CAN_FilterInitStructure.CAN_FilterIdHigh=0x0000;32位ID
CAN_FilterInitStructure.CAN_FilterIdLow=0x0000;
CAN_FilterInitStructure.CAN_FilterMaskIdHigh=0x0000;//32位MASK
CAN_FilterInitStructure.CAN_FilterMaskIdLow=0x0000;
CAN_FilterInitStructure.CAN_FilterFIFOAssignment=CAN_Filter_FIFO0;//過濾器0關聯到FIFO0
CAN_FilterInitStructure.CAN_FilterActivation=ENABLE; //激活過濾器0
CAN_FilterInit(&CAN_FilterInitStructure);//濾波器初始化
return 0;
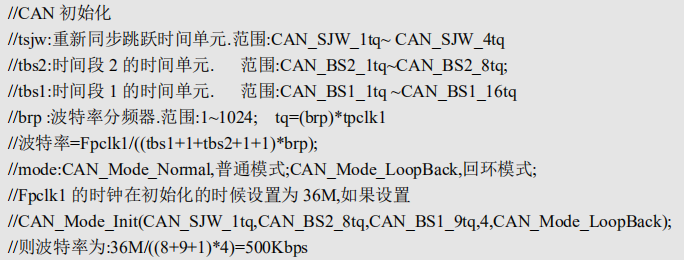
}本節初始化只講波特率相關,過濾器和CAN單元設定后面再來看看,
實際上只要波特率相同,can兩邊都有個120Ω的電阻就可以通信了,過濾器什么的是為了讓通信更有效率,要不然其實可以在總線上接收方一直接收,發送方一直發送,這樣的話can會接收所有的資訊,這所有的資訊最后還是要cpu來處理,會增加cpu的負擔,占用CPU資源,can也就沒有起多大作用了,
關于波特率,在原子的教程里面有個公式,我今天在這個波特率設定上卡了好一會兒,
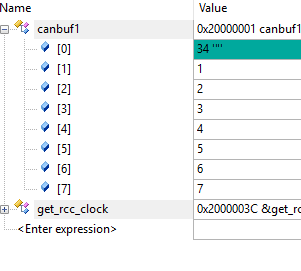
這里給一個查看系統波特率的方法
RCC_ClocksTypeDef get_rcc_clock; //這行設定為全域變數
RCC_GetClocksFreq(&get_rcc_clock); //這行放在main函式初始化里面除錯時候就可以得到時鐘頻率了
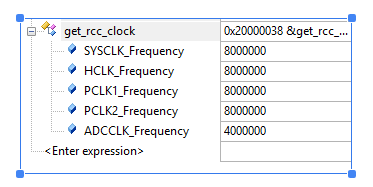
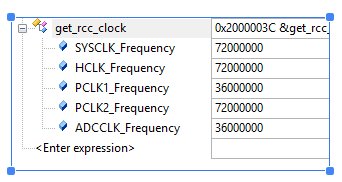
從上圖我們可以看到c8t6的CAN介面頻率PCLK1為8M,zet6的CAN介面時鐘頻率為36M
根據上面的公式我們計算波特率讓兩個板子的CAN口波特率相等
36/(1+4+5)/9=8/(1+4+5)/2
CAN_Mode_Init(CAN_SJW_1tq,CAN_BS2_4tq,CAN_BS1_5tq,9,0);//大板
CAN_Mode_Init(CAN_SJW_1tq,CAN_BS2_4tq,CAN_BS1_5tq,2,0);//小板如上面代碼,把兩個板子波特率設定相同就可以通信了,不過要注意這里好像不能設定為(1,1,1,9,0)這種,就是前面三個都不能是1,具體的我還不清楚,這里只說下成功經驗,后續的在CAN通信下篇講解,
本小節,主要是對CAN進行初始化,STM32F103系列可以直接用上面的代碼,不同容量的芯片只要改一下波特率就可以了,至于其他的過濾器、郵箱報文什么的暫時不用管,我們要先跑通才能繼續進行詳細設定,
6.發送相關
發送主要是呼叫這一行代碼,第一個引數是選哪個CAN口,有的芯片有兩個CAN口,我們這里直接用CAN1就可以了,至于具體怎么發,我們后面再看,
CAN_Transmit(CAN1, &TxMessage)代碼如下,這個代碼也是通用的,我的三個板子都可以用,不需要修改什么
u8 Can_Send_Msg(u8* msg,u8 len)
{
u16 i=0;
u8 mbox;
CanTxMsg TxMessage;
TxMessage.StdId=0x13; // 標準識別符號
TxMessage.ExtId=0x12; // 設定擴展標示符
TxMessage.IDE=CAN_Id_Standard; // 標準幀
TxMessage.RTR=CAN_RTR_Data; // 資料幀
TxMessage.DLC=len; // 要發送的資料長度
for(i=0; i<len; i++)
TxMessage.Data[i]=msg[i];
mbox= CAN_Transmit(CAN1, &TxMessage);
i=0;
while((CAN_TransmitStatus(CAN1, mbox)==CAN_TxStatus_Failed)&&(i<0XFFF))
i++; //等待發送結束
if(i>=0XFFF)
return 1;
return 0;
}上面代碼里面的變數 i 主要是用來發送給TxMessage.Data[i]賦值用的
通過CAN_TransmitStatus(CAN1, mbox)==CAN_TxStatus_Failed來查看是否發送成功,查看庫檔案發現CAN發送狀態有這幾個,如果是Failed應該是還沒發完,如果是OK應該就是發完了,具體的后面再看吧,

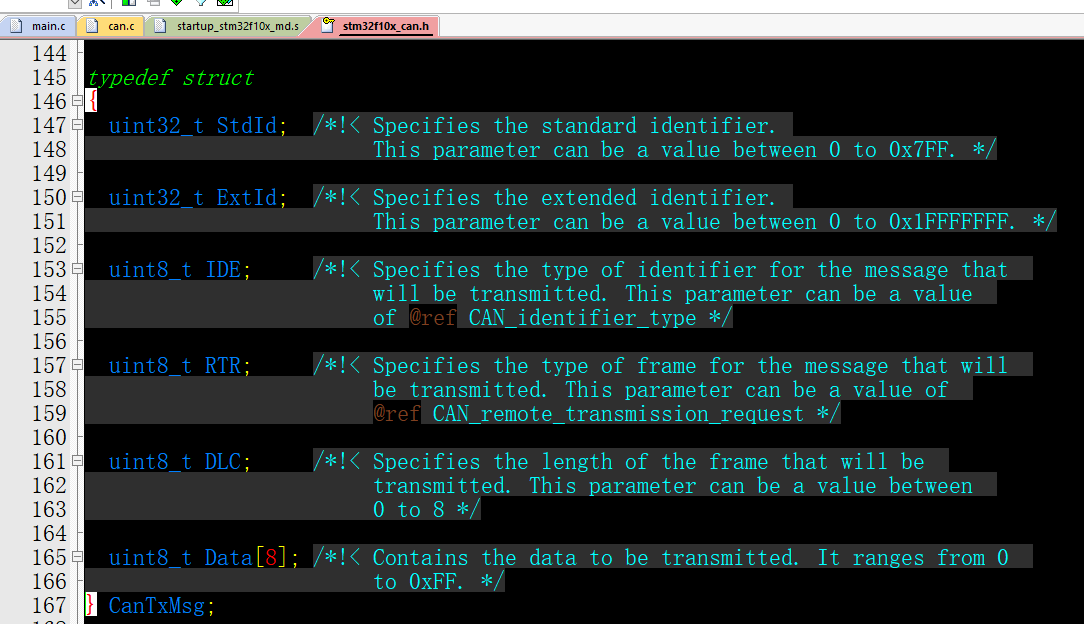
CanTxMsg是在韌體庫里面定義好的,我們直接拿來用就可以了,因此他一幀確實只能傳輸8個位元組的資訊,如果要傳64個位元組,分8次傳輸就可以了,至于后面的識別符號ID怎么設定下節再來討論,
7.接收相關
代碼如下
CanRxMsg RxMessage;
u8 Can_Receive_Msg(u8 *buf)
{
u32 i;
if( CAN_MessagePending(CAN1,CAN_FIFO0)==0)return 0; //沒有接收到資料,直接退出
CAN_Receive(CAN1, CAN_FIFO0, &RxMessage);//讀取資料
for(i=0; i<8; i++)
buf[i]=RxMessage.Data[i];
return RxMessage.DLC;
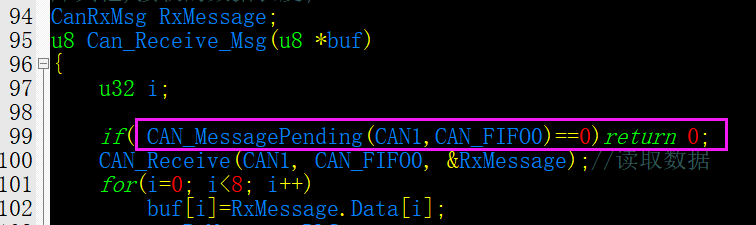
}對了,上面的全域變數主要是用在接收方小板DeBug查看資料的
從下圖可以看出,他的接收應該是硬體自動接收,總線上資料對了,識別符號ID對了就直接存在接收郵箱里面,然后我們通過下面這個Pending判斷有郵件過來就直接取出來
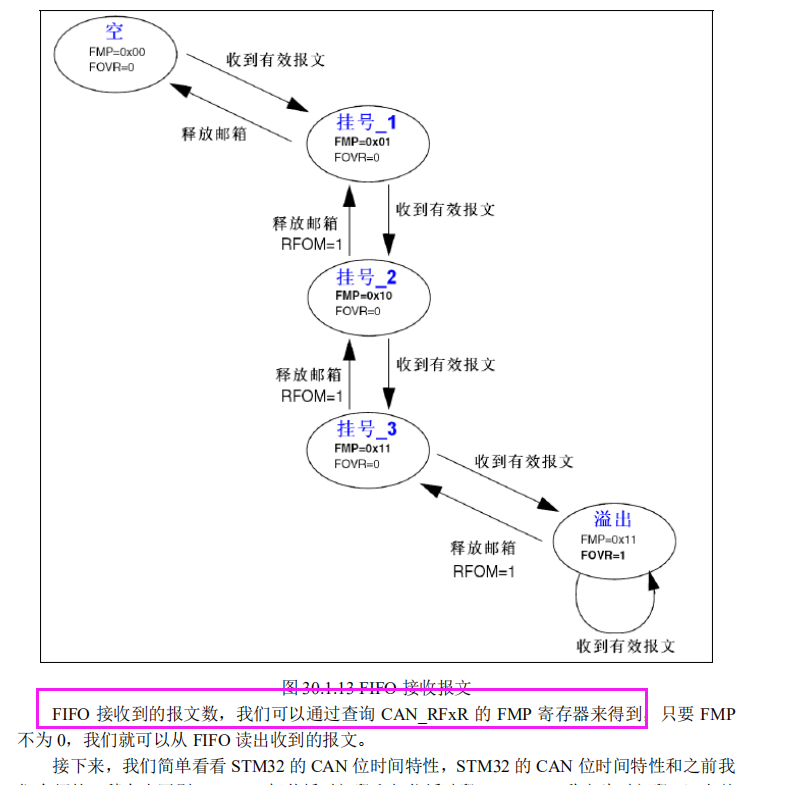
8.代碼邏輯
小板發送芯片:can初始化之后,在main函式的while里面一直發送資料
小板接收芯片:can初始化之后,在main函式的while里面呼叫上面的接收函式,然后存在一個接收陣列里面,這個接收陣列設定為全域變數,方便DeBug查看陣列里面的內容,
大板接收芯片:can初始化后,在main函式的while里面一直呼叫接收函式,如果有收到資料就顯示在螢屏上面,
9.效果如下
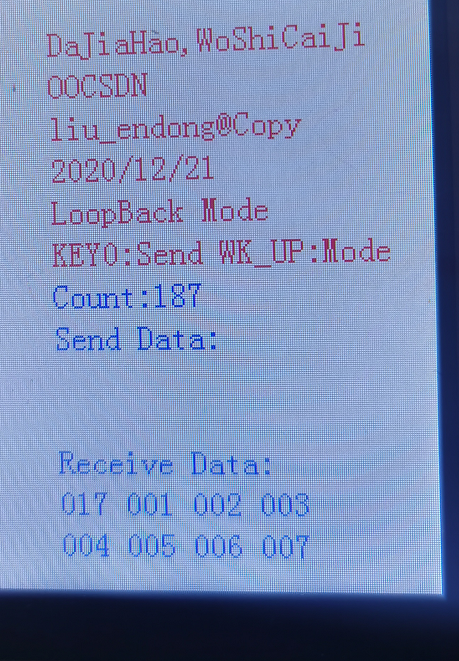
上圖螢屏上面有些顯示資料沒有更改,只用看接收效果就可以了,
10.大板代碼
螢屏相關代碼本次就不發了,有需要的同學可以留言,
代碼里面有些注釋因為代碼改了注釋忘了改大家將就著看哈,,
大板main.c
#include "led.h"
#include "delay.h"
#include "key.h"
#include "sys.h"
#include "lcd.h"
#include "usart.h"
#include "can.h"
RCC_ClocksTypeDef get_rcc_clock; //這行設定為全域變數
u8 canbuf1[8];
int main(void)
{
u8 key;
u8 i=0,t=0;
u8 cnt=0;
u8 canbuf[8];
u8 res;
u8 mode=CAN_Mode_LoopBack;//CAN作業模式;CAN_Mode_Normal(0):普通模式,CAN_Mode_LoopBack(1):環回模式
RCC_GetClocksFreq(&get_rcc_clock); //這行放在main函式初始化里面,別放在while(1)里面
delay_init(); //延時函式初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//設定中斷優先級分組為組2:2位搶占優先級,2位回應優先級
uart_init(115200); //串口初始化為115200
LED_Init(); //初始化與LED連接的硬體介面
LCD_Init(); //初始化LCD
KEY_Init(); //按鍵初始化
CAN_Mode_Init(CAN_SJW_1tq,CAN_BS2_4tq,CAN_BS1_5tq,9,0);
POINT_COLOR=RED;//設定字體為紅色
LCD_ShowString(60,50,200,16,16,"DaJiaHao,WoShiCaiJi");
LCD_ShowString(60,70,200,16,16,"OOCSDN");
LCD_ShowString(60,90,200,16,16,"liu_endong@Copy");
LCD_ShowString(60,110,200,16,16,"2020/12/21");
LCD_ShowString(60,130,200,16,16,"LoopBack Mode");
LCD_ShowString(60,150,200,16,16,"KEY0:Send WK_UP:Mode");//顯示提示資訊
POINT_COLOR=BLUE;//設定字體為藍色
LCD_ShowString(60,170,200,16,16,"Count:"); //顯示當前計數值
LCD_ShowString(60,190,200,16,16,"Send Data:"); //提示發送的資料
LCD_ShowString(60,250,200,16,16,"Receive Data:"); //提示接收到的資料
while(1)
{
key=KEY_Scan(0);
// if(key==KEY0_PRES)//KEY0按下,發送一次資料
if(0)
{
for(i=0; i<8; i++)
{
canbuf[i]=cnt+i;//填充發送緩沖區
if(i<4)LCD_ShowxNum(60+i*32,210,canbuf[i],3,16,0X80); //顯示資料
else LCD_ShowxNum(60+(i-4)*32,230,canbuf[i],3,16,0X80); //顯示資料
}
res=Can_Send_Msg(canbuf,8);//發送8個位元組
if(res)LCD_ShowString(60+80,190,200,16,16,"Failed"); //提示發送失敗
else LCD_ShowString(60+80,190,200,16,16,"OK "); //提示發送成功
}
else if(key==WKUP_PRES)//WK_UP按下,改變CAN的作業模式
{
mode=!mode;
CAN_Mode_Init(CAN_SJW_1tq,CAN_BS2_8tq,CAN_BS1_9tq,4,mode);//CAN普通模式初始化, 波特率500Kbps
POINT_COLOR=RED;//設定字體為紅色
if(mode==0)//普通模式,需要2個開發板
{
LCD_ShowString(60,130,200,16,16,"Nnormal Mode ");
} else //回環模式,一個開發板就可以測驗了.
{
LCD_ShowString(60,130,200,16,16,"LoopBack Mode");
}
POINT_COLOR=BLUE;//設定字體為藍色
}
key=Can_Receive_Msg(canbuf1);
if(key)//接收到有資料
{
LCD_Fill(60,270,130,310,WHITE);//清除之前的顯示
for(i=0; i<key; i++)
{
if(i<4)LCD_ShowxNum(60+i*32,270,canbuf1[i],3,16,0X80); //顯示資料
else LCD_ShowxNum(60+(i-4)*32,290,canbuf1[i],3,16,0X80); //顯示資料
}
}
t++;
delay_ms(1000);
if(1)
{
LED0=!LED0;//提示系統正在運行
t=0;
cnt++;
LCD_ShowxNum(60+48,170,cnt,3,16,0X80); //顯示資料
}
}
}
大板can.c
#include "can.h"
#include "led.h"
#include "delay.h"
#include "usart.h"
u8 CAN_Mode_Init(u8 tsjw,u8 tbs2,u8 tbs1,u16 brp,u8 mode)
{
GPIO_InitTypeDef GPIO_InitStructure;
CAN_InitTypeDef CAN_InitStructure;
CAN_FilterInitTypeDef CAN_FilterInitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);//使能PORTA時鐘
RCC_APB1PeriphClockCmd(RCC_APB1Periph_CAN1, ENABLE);//使能CAN1時鐘
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //復用推挽
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化IO
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//上拉輸入
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化IO
//CAN單元設定
CAN_InitStructure.CAN_TTCM=DISABLE; //非時間觸發通信模式 //
CAN_InitStructure.CAN_ABOM=DISABLE; //軟體自動離線管理 //
CAN_InitStructure.CAN_AWUM=DISABLE; //睡眠模式通過軟體喚醒(清除CAN->MCR的SLEEP位)//
CAN_InitStructure.CAN_NART=ENABLE; //禁止報文自動傳送 //
CAN_InitStructure.CAN_RFLM=DISABLE; //報文不鎖定,新的覆寫舊的 //
CAN_InitStructure.CAN_TXFP=DISABLE; //優先級由報文識別符號決定 //
CAN_InitStructure.CAN_Mode= mode; //模式設定: mode:0,普通模式;1,回環模式; //
//設定波特率
CAN_InitStructure.CAN_SJW=tsjw; //重新同步跳躍寬度(Tsjw)為tsjw+1個時間單位 CAN_SJW_1tq CAN_SJW_2tq CAN_SJW_3tq CAN_SJW_4tq
CAN_InitStructure.CAN_BS1=tbs1; //Tbs1=tbs1+1個時間單位CAN_BS1_1tq ~CAN_BS1_16tq
CAN_InitStructure.CAN_BS2=tbs2;//Tbs2=tbs2+1個時間單位CAN_BS2_1tq ~ CAN_BS2_8tq
CAN_InitStructure.CAN_Prescaler=brp; //分頻系數(Fdiv)為brp+1 //
CAN_Init(CAN1, &CAN_InitStructure); // 初始化CAN1
CAN_FilterInitStructure.CAN_FilterNumber=0; //過濾器0
CAN_FilterInitStructure.CAN_FilterMode=CAN_FilterMode_IdMask;
CAN_FilterInitStructure.CAN_FilterScale=CAN_FilterScale_32bit; //32位
CAN_FilterInitStructure.CAN_FilterIdHigh=0x0000;32位ID
CAN_FilterInitStructure.CAN_FilterIdLow=0x0000;
CAN_FilterInitStructure.CAN_FilterMaskIdHigh=0x0000;//32位MASK
CAN_FilterInitStructure.CAN_FilterMaskIdLow=0x0000;
CAN_FilterInitStructure.CAN_FilterFIFOAssignment=CAN_Filter_FIFO0;//過濾器0關聯到FIFO0
CAN_FilterInitStructure.CAN_FilterActivation=ENABLE; //激活過濾器0
CAN_FilterInit(&CAN_FilterInitStructure);//濾波器初始化
return 0;
}
//can發送一組資料(固定格式:ID為0X12,標準幀,資料幀)
//len:資料長度(最大為8)
//msg:資料指標,最大為8個位元組.
//回傳值:0,成功;
//其他,失敗;
u8 Can_Send_Msg(u8* msg,u8 len)
{
u8 mbox;
u16 i=0;
CanTxMsg TxMessage;
TxMessage.StdId=0x12; // 標準識別符號
TxMessage.ExtId=0x12; // 設定擴展標示符
TxMessage.IDE=CAN_Id_Standard; // 標準幀
TxMessage.RTR=CAN_RTR_Data; // 資料幀
TxMessage.DLC=len; // 要發送的資料長度
for(i=0; i<len; i++)
TxMessage.Data[i]=msg[i];
mbox= CAN_Transmit(CAN1, &TxMessage);
i=0;
while((CAN_TransmitStatus(CAN1, mbox)==CAN_TxStatus_Failed)&&(i<0XFFF))
i++; //等待發送結束
if(i>=0XFFF)
return 1;
return 0;
}
//can口接收資料查詢
//buf:資料快取區;
//回傳值:0,無資料被收到;
//其他,接收的資料長度;
CanRxMsg RxMessage;
u8 Can_Receive_Msg(u8 *buf)
{
u32 i;
if( CAN_MessagePending(CAN1,CAN_FIFO0)==0)return 0; //沒有接收到資料,直接退出
CAN_Receive(CAN1, CAN_FIFO0, &RxMessage);//讀取資料
for(i=0; i<8; i++)
buf[i]=RxMessage.Data[i];
return RxMessage.DLC;
}
大板can.h
#ifndef __CAN_H
#define __CAN_H
#include "sys.h"
#define CAN_RX0_INT_ENABLE 0 //0,不使能;1,使能.
u8 CAN_Mode_Init(u8 tsjw,u8 tbs2,u8 tbs1,u16 brp,u8 mode);//CAN初始化
u8 Can_Send_Msg(u8* msg,u8 len); //發送資料
u8 Can_Receive_Msg(u8 *buf); //接收資料
#endif
11.小板代碼
can的代碼是直接復制上面的檔案
只有main函式有點區別
#include "stm32f10x.h"
#include "delay.h"
#include "led.h"
#include "pwm.h"
#include "usart.h"
#include "timer.h"
#include "can.h"
u8 res;
RCC_ClocksTypeDef get_rcc_clock;
u8 canbuf1[8]= {0};
int main(void)
{
// SystemInit();
u8 a=0;
u8 canbuf[8]= {a,1,2,3,4,5,6,7};
RCC_GetClocksFreq(&get_rcc_clock);
delay_init();
ledInit();
uart_init(115200);
TIM2_Int_Init(7199,999);
TIM3_CH2_PWM_Init(899,0);
CAN_Mode_Init(CAN_SJW_1tq,CAN_BS2_4tq,CAN_BS1_5tq,2,0);
while(1)
{
canbuf[0]=a;
a++;
if(a==100)
a=0;
if(1)
{
Can_Receive_Msg(canbuf1);
}
delay_ms(40);
LED0=~LED0;
}
}
以上,
大家新年快樂!
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/243369.html
標籤:其他
上一篇:5V升壓8.4V芯片