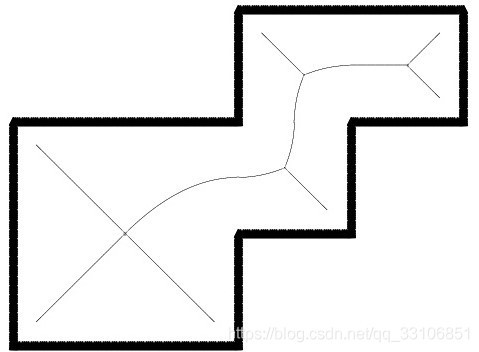
Voronoi_Diagram最大化的利用了障礙物之間的空隙,確保生成的路徑是最大程度遠離所有障礙物的安全行駛路徑,與影像的距離變換演算法很相似,
1、多邊形或柵格圖離散采點 points,
2、scipy.spatial.Voronoi(points),
3、Voronoi diagram構造完成之后,消除頂點包含在障礙物或者與障礙物相交的Voronoi Edge,剩下的Voronoi Edge就構成了避開所有障礙物的可行駛路徑集合,
實作代碼參考:https://github.com/AtsushiSakai/PythonRobotics/blob/master/PathPlanning/VoronoiRoadMap/voronoi_road_map.py
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/254885.html
標籤:其他
上一篇:BGP(3)--路由策略
下一篇:java多執行緒基礎概念