魚眼相機模型 (fisheye camera model)
- 模型介紹
- 等距投影
- 等立體角投影
- 正交投影
- 體視投影
- 線性投影
- Kannala-Brandt 模型
- 去畸變程序
- 投影程序
- 反投影程序
- 雅可比計算
之前總結了一下針孔相機的模型,然后得到了比較積極的回復(其實是我到處求人關注的,雖然截至到目前才三個人),所以就再接再勵,乘勝追擊(也沒得辦法,夸下的海口,跪著也要做完),繼續總結其他相機模型,
模型介紹
魚眼相機相較于針孔相機來說,視野更廣,但畸變也更加嚴重,因此普通的針孔模型已不適用,魚眼鏡頭的基本構造如圖所示,經過多個鏡頭的折射,最終到達成像單元上,文章中所有圖片均來自于網路,非本人所繪,

一般情況下,可以通過控制光線的路徑來設計各種各樣的鏡頭型別,根據投影方式的不同,可以將這些鏡頭分為等距投影、等立體角投影、正交投影、體視投影以及線性投影,
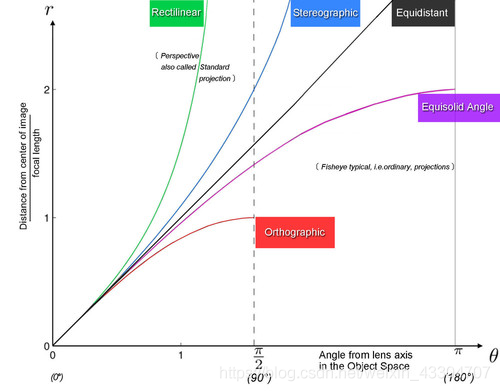
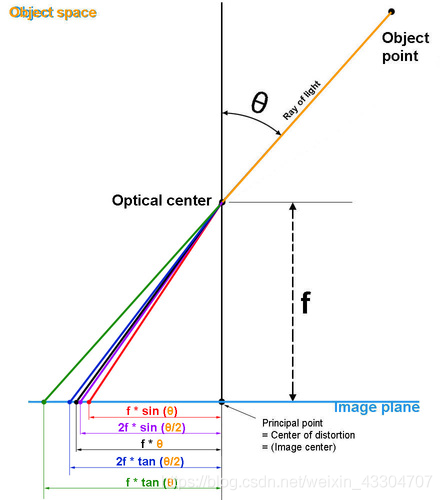
等距投影
r = f θ r=f \theta r=fθ
等立體角投影
r = 2 f s i n ( θ 2 ) r=2fsin({{\theta} \over {2}}) r=2fsin(2θ?)
正交投影
r = f s i n ( θ ) r=fsin(\theta ) r=fsin(θ)
體視投影
r = 2 f t a n ( θ 2 ) r=2ftan({{\theta} \over {2}}) r=2ftan(2θ?)
線性投影
r = f t a n ( θ ) r=ftan(\theta) r=ftan(θ)
Kannala-Brandt 模型
同針孔模型一樣,魚眼模型也有畸變,那么怎么來用數學魚眼描述這種畸變呢?觀察各種投影方式,發現他們都是一個關于入射角
θ
\theta
θ 的奇函式,因此魚眼鏡頭的畸變也是對
θ
\theta
θ 的畸變,KB模型用只包含奇次項的多項式來描述畸變程序,其具體形式如下所示
θ
d
=
θ
+
k
1
θ
3
+
k
2
θ
5
+
k
3
θ
7
+
k
4
θ
9
\theta_d=\theta+k_1\theta^3+k_2\theta^5+k_3\theta^7+k_4\theta^9
θd?=θ+k1?θ3+k2?θ5+k3?θ7+k4?θ9
opencv中使用的魚眼相機畸變模型就是這個模型,該模型適用于大多數魚眼相機,另外,也可以用這種模型來對普通的針孔相機模型進行標定,仔細觀察,上述的線性投影實際就是普通的針孔投影模型,最后魚眼相機的投影模型可以表示為
r
=
f
θ
d
r = f \theta_d
r=fθd?
其中
r
r
r表示影像中像素點到主點的距離,
去畸變程序
對于魚眼相機的去畸變程序可以采用決議的方式,因為從上述畸變公式中可以看到,畸變模型是一個多項式,理論上是存在決議解的,但本人使用的方法和針孔模型中類似,通過優化的方法進行去即便,代碼如下
template<typename DERIVED_P>
void undistort(const Eigen::MatrixBase <DERIVED_P> &p_d,
const Eigen::MatrixBase <DERIVED_P> &p_ud) const
{
EIGEN_STATIC_ASSERT_VECTOR_SPECIFIC_SIZE_OR_DYNAMIC(Eigen::MatrixBase<DERIVED_P>, 2)
Eigen::MatrixBase<DERIVED_P> &y_ud = const_cast<Eigen::MatrixBase<DERIVED_P> &>(p_ud);
Eigen::MatrixBase<DERIVED_P> &y_d = const_cast<Eigen::MatrixBase<DERIVED_P> &>(p_d);
y_ud.derived().resize(2);
y_d.derived().resize(2);
struct MLFunctor{
MLFunctor( const Eigen::Vector2d &imagePoint, double k1, double k2, double k3, double k4 )
: imagePoint_(imagePoint), _k1(k1), _k2(k2), _k3(k3), _k4(k4)
{
}
int operator( )( const Eigen::VectorXd &x, Eigen::VectorXd &fvec ) const{
double theta = x[0];
double phi = x[1];
double theta2 = theta * theta;
double theta4 = theta2 * theta2;
double theta6 = theta4 * theta2;
double theta8 = theta4 * theta4;
double thetad = theta * ( 1 + _k1 * theta2 + _k2 * theta4 + _k3 * theta6 + _k4 * theta8);
fvec[0] = thetad;
fvec[1] = phi;
fvec = fvec - imagePoint_;
return 0;
}
int df( const Eigen::VectorXd &x, Eigen::MatrixXd &fjac ) const
{
double theta = x[0];
double theta2 = theta * theta;
double theta4 = theta2 * theta2;
double theta6 = theta4 * theta2;
double theta8 = theta4 * theta4;
fjac(0, 0) = 9 * _k4 * theta8 + 7 * _k3 * theta6 + 5 * _k2 * theta4 + 3 * _k1 * theta2 + 1;
fjac(0, 1) = 0;
fjac(1, 0) = 0;
fjac(1, 1) = 1;
return 0;
}
int values() const { return 2; }
int inputs() const { return 2; }
Eigen::Vector2d imagePoint_;
double _k1;
double _k2;
double _k3;
double _k4;
};
Eigen::Vector2d target = y_d;
MLFunctor func( target, m_k1, m_k2, m_k3, m_k4 );
Eigen::LevenbergMarquardt< MLFunctor > lm(func);
double theta = y_d[0];
double phi = y_d[1];
Eigen::VectorXd res = Eigen::Vector2d(theta, phi);
lm.minimize(res);
y_ud = res;
}
投影程序
- 給定相機坐標系下一點 P c = ( x , y , z ) P_c=(x, y, z) Pc?=(x,y,z)
- 歸一化到球平面上 P s = P c ∣ ∣ P c ∣ ∣ = ( x s , y s , z s ) P_s = {{P_c} \over {||P_c||}}=(x_s, y_s,z_s) Ps?=∣∣Pc?∣∣Pc??=(xs?,ys?,zs?)
- 求經緯度 θ = a c o s ( z s ) = a t a n 2 ( x 2 + y 2 ) , z ) \theta=acos(z_s)=atan2(\sqrt{x^2+y^2)}, z) θ=acos(zs?)=atan2(x2+y2) ?,z), ? = a t a n 2 ( y s , x s ) \phi=atan2(y_s, x_s) ?=atan2(ys?,xs?)
- 利用畸變模型對 θ \theta θ進行加畸變處理,得到 θ d \theta_d θd?,
- 最后得到該點在影像中的像素坐標 u = f x θ d x c r + c x u={{f_x\theta_d x_c}\over r } +cx u=rfx?θd?xc??+cx, v = f y θ d y c r + c y v={{f_y\theta_d y_c}\over r } +cy v=rfy?θd?yc??+cy, r = x c 2 + y c 2 r=\sqrt{x_c^2 + y_c^2} r=xc2?+yc2? ?
反投影程序
- 給定影像上一點 p = ( u , v ) p=(u, v) p=(u,v).
- 可以得到歸一化坐標 p u d = ( x , y ) = ( u ? c x f x , v ? c y f y ) p_{ud} = (x, y) = ({{u - cx} \over f_x}, {{v - cy} \over f_y}) pud?=(x,y)=(fx?u?cx?,fy?v?cy?)
- 可以得到帶畸變的入射角 θ d = x 2 + y 2 , ? = a t a n 2 ( y , x ) \theta_d=\sqrt{x^2+y^2}, \phi=atan2(y, x) θd?=x2+y2 ?,?=atan2(y,x).
- 去畸變后得到 θ \theta θ.
- 最后得到單位球面坐標 x = s i n ( θ ) c o s ( ? ) , y = s i n ( θ ) s i n ( ? ) , z = c o s ( θ ) x = sin(\theta)cos(\phi), y=sin(\theta)sin(\phi), z = cos(\theta) x=sin(θ)cos(?),y=sin(θ)sin(?),z=cos(θ)
雅可比計算
多數情況下,都用BA演算法來計算相機的內外參,這就需要知道雅可比矩陣,即投影誤差對各待優化變數的偏導陣列成的矩陣,所謂的投影誤差,實際檢測到點與投影到影像上的點之間的誤差
e
r
r
=
p
m
?
p
err=p_m - p
err=pm??p
其中
p
m
p_m
pm?表示檢測到的角點,為了避免手撕公式,我使用了matlab直接來推匯出結果,并且在推導公式時,沒有考慮畸變項,因為公式太長了,懶得敲,
代碼:
syms fx fy x y z cx cy k1 k2 k3 k4
R = sqrt(x^2 + y^2 + z^2);
xc = x / R;
yc = y / R;
zc = z / R;
theta = acos(z);
%thetad = theta + k1 * theta^3 + k2 * theta^5 + k3 * theta^7 + k4 * theta^9;
thetad = theta;
r = sqrt(xc^2 + yc^2);
u = fx * (thetad * xc) / r + cx;
v = fy * (thetad * yc) / r + cy;
alphaE_alphaK = - [diff(u, fx), diff(u, fy), diff(u, cx), diff(u, cy);
diff(v, fx), diff(v, fy), diff(v, cx), diff(v, cy)]
alphaE_alphaP = -[diff(u, x), diff(u, y), diff(u, z);
diff(v, x), diff(v, y), diff(v, z)]
alphaP_alphaR = [1, 0, 0, 0, z, -y;
0, 1, 0, -z, 0, x;
0, 0, 1, y, -x, 0]
alphaE_alphaP * alphaP_alphaR
假設相機坐標系下歸一化到球面的3D點坐標坐標為 P s = ( x s , y s , z s ) P_s=(x_s, y_s, z_s) Ps?=(xs?,ys?,zs?)
-
誤差項關于內參的偏導數
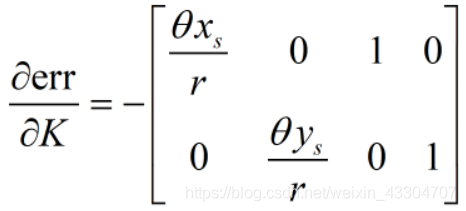
其中 r = x s 2 + y s 2 r=\sqrt{x_s^2 + y_s^2} r=xs2?+ys2? ?, θ = a c o s ( z s ) \theta=acos(z_s) θ=acos(zs?), -
誤差項關于相機坐標系下點 P s P_s Ps?的偏導
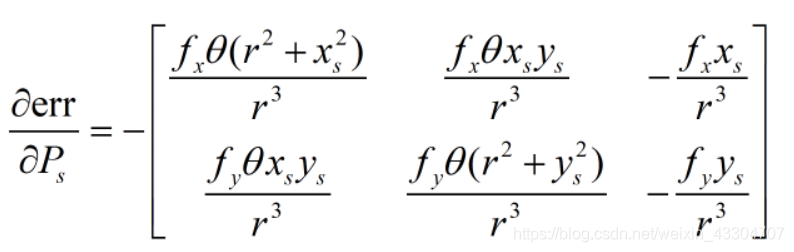
其中 r = x s 2 + y s 2 r=\sqrt{x_s^2 + y_s^2} r=xs2?+ys2? ?, θ = a c o s ( z s ) \theta=acos(z_s) θ=acos(zs?), -
誤差項在李代數上的擾動模型
根據鏈式法則可得
? e r r ? δ ξ = ? e r r ? P s ? P s ? δ ξ {{\partial err} \over {\partial \delta \xi }} = {{\partial err} \over {\partial {P_s}}}{{\partial {P_{\rm{s}}}} \over {\partial \delta \xi }} ?δξ?err?=?Ps??err??δξ?Ps??
其中,
?
P
c
?
δ
ξ
{{\partial {P_{\rm{c}}}} \over {\partial \delta \xi }}
?δξ?Pc??的推導后續會有專門篇幅進行總結,在這個先用起來再說,
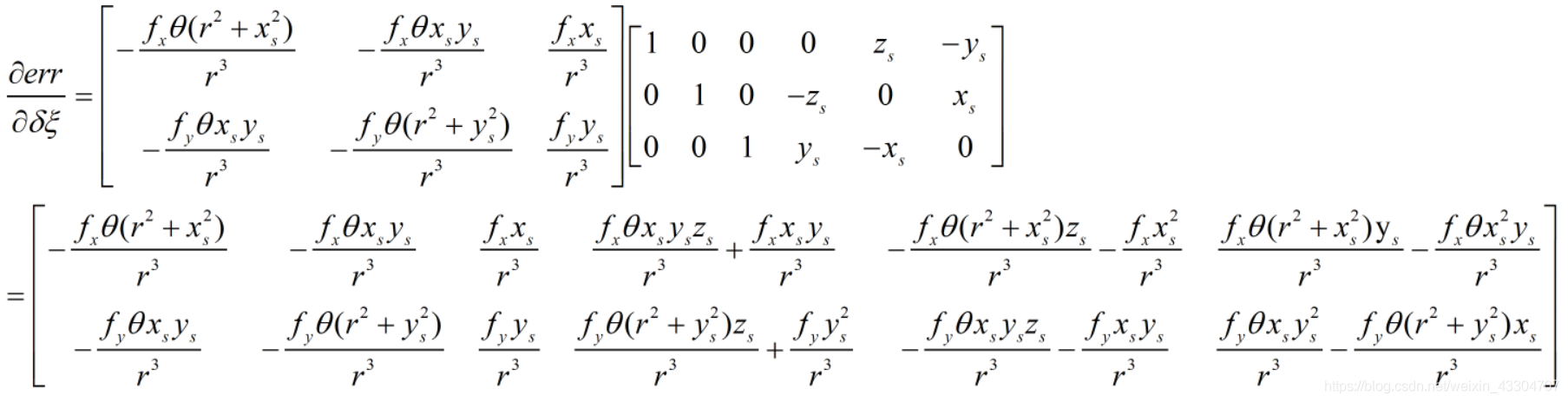
其中
r
=
x
s
2
+
y
s
2
r=\sqrt{x_s^2 + y_s^2}
r=xs2?+ys2?
?,
θ
=
a
c
o
s
(
z
s
)
\theta=acos(z_s)
θ=acos(zs?),
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/255310.html
標籤:其他
上一篇:魔改合成大西瓜
下一篇:Matlab實作幅度調制詳解