什么是YOLO2演算法
“You Only Look Once”
YOLO的核心思想就是利用整張圖作為網路的輸入,直接在輸出層回歸bounding box的位置和bounding box所屬的類別,
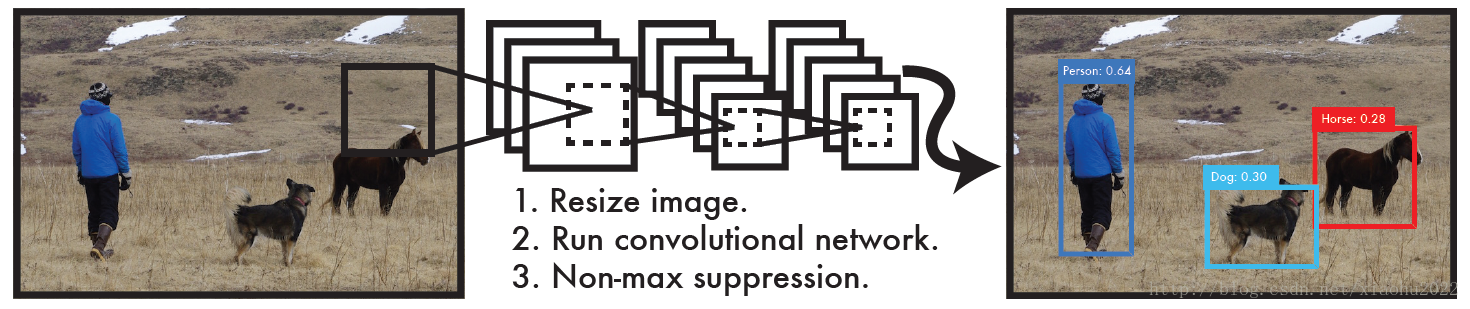
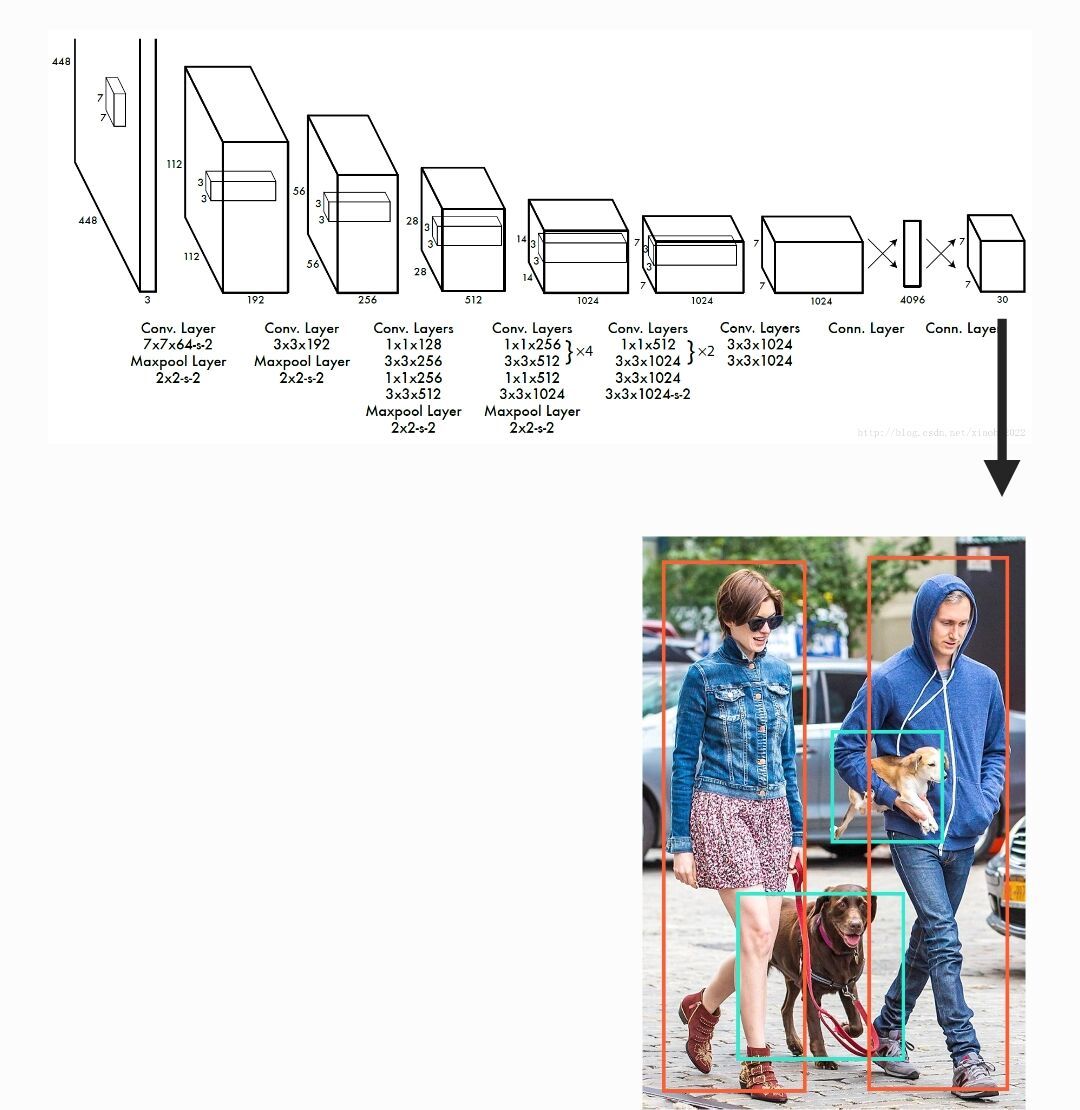
Yolo演算法采用一個單獨的CNN模型實作end-to-end的目標檢測,整個系統如圖5所示:首先將輸入圖片resize到448x448,然后送入CNN網路,最后處理網路預測結果得到檢測的目標,相比R-CNN演算法,其是一個統一的框架,其速度更快,而且Yolo的訓練程序也是end-to-end的,
YOLO演算法的原理
具體來說,Yolo的CNN網路將輸入的圖片分割成S×S網格,然后每個單元格負責去檢測那些中心點落在該格子內的目標,如圖6所示,可以看到狗這個目標的中心落在左下角一個單元格內,那么該單元格負責預測這個狗,每個單元格會預測B個邊界框(bounding box)以及邊界框的置信度(confidence score),所謂置信度其實包含兩個方面,一是這個邊界框含有目標的可能性大小,二是這個邊界框的準確度,前者記為Pr(object),當該邊界框是背景時(即不包含目標),此時Pr(object)=0,而當該邊界框包含目標時,Pr(object)=1,
YOLO2在街景環境的物體識別
<style type="text/css">iframe { text-align: center }</style> <iframe width="900px" height="630px" src="https://www.cnblogs.com//player.bilibili.com/player.html?aid=801454243&bvid=BV1Ey4y1n7vG&cid=290053514&page=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"> </iframe>YOLO演算法的缺點/優點
缺點
YOLO各個單元格僅僅預測兩個邊界框,且屬于一個類別,對于小物體,YOLO的表現不佳,這方面的改進可以看SSD,其采用多尺度單元格,也可以看Faster R-CNN,其采用了anchor boxes,Yolo對于在物體的寬高比方面泛化率低,就是無法定位不尋常比例的物體,并且YOLO的定位不準確也是很大的問題,
優點
i YOLO 全程end-to-end,故而快且簡潔,
iiYolo是對整張圖片做卷積,所以擁有更大的視野,不容易對背景誤判
參考博客:yolo演算法詳解
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/255516.html
標籤:其他