專案場景:
筆者前段時間接觸到了一個環境監測類的專案,需要對空氣質量進行讀取,也因此買了部分氣體類的傳感器進行除錯,除錯程序中就遇到了這么一個粉塵傳感器——GP2Y1010AU0F,在樹莓派上很多資料對應這個模塊記錄是少之又少的,接下來筆者就記錄一下這個模塊在樹莓派上的使用與心得,希望能給讀者一定的幫助,
例程缺失:
筆者的傳感器是在淘寶的一家微雪電子購買的灰塵傳感器 GP2Y1014AU0F PM2.5 粉塵顆粒 霧霾 檢測儀,本來看說明看他是ADC模擬信號傳輸的,想著應該是蠻簡單的,結果卻是踩了個大坑,
微雪電子提供的模塊是底下有含PCB板的,這相對其他店需要手動焊接還是比較方便的,他們也給了模塊的相應資料與代碼例程,里面也較為詳細的解釋了該模塊的作業原理,可惜的是給只有STM32與Arduino的代碼例程,
原因分析:
看到給的例程里沒有樹莓派的,筆者也是有點懵的,畢竟筆者的樹莓派都是在這家店買的,有可能是因為樹莓派缺少AD轉換模塊,寫起來比較復雜吧,
不過筆者有買過一個傳感器集成模塊Sense HAT (B),里面有對AD的轉化,也曾為其寫過一篇博客多傳感器(大氣壓 溫濕度 氣體濃度ADC采樣)集合,當時筆者也做的是這個專案,只不過當時粉塵資料一直出不來,就沒寫進去,
問題描述:
既然沒有例程,那就只能自己寫,剛開始筆者沒有注意到還有燈的驅動這么個條件,只是仿照著常規ADC的寫,結果可想而知(采樣一直處于0的位置),,,
看到如下圖這么個控制原理,我才發現這個不是想象中那樣的簡單,
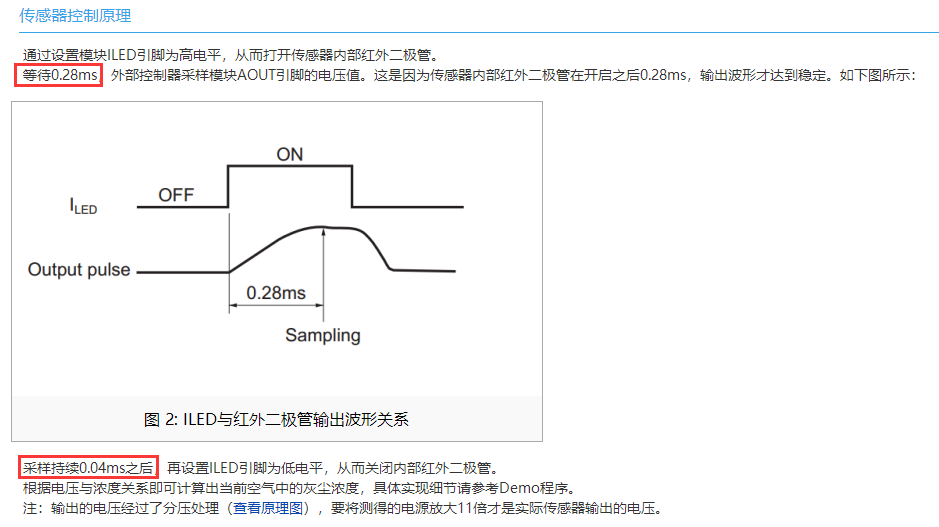
這個模塊是需要開啟內置的一個LED燈,等待0.28ms才能穩定讀取數值,STM32與Arduino的代碼中1ms都是delay(1000)的,但是樹莓派time.sleep(1)就是1秒,因此0.28ms相當于time.sleep(0.00028),
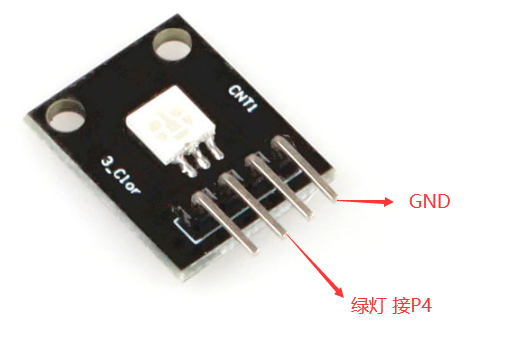
接下來是接線部分:
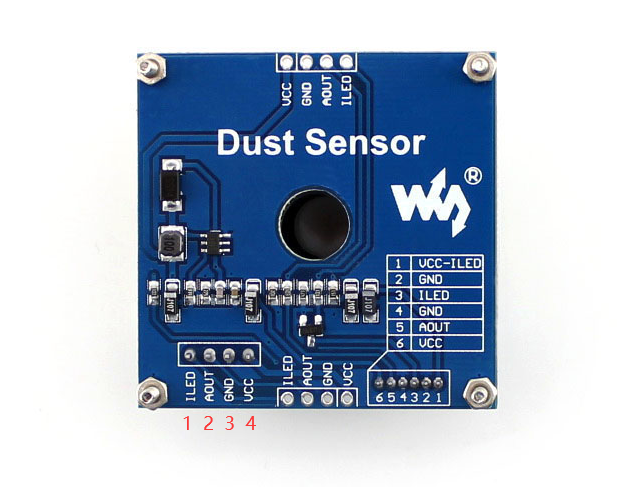
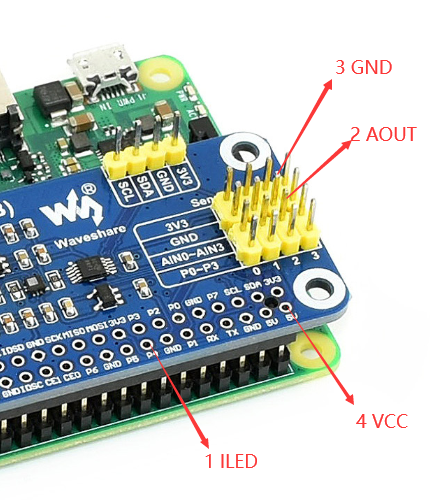
燈是用杜邦線接到了GPIO.4處,對應的物理引腳編碼為16

根據資料中的Arduino代碼,我寫出了如下代碼(附上ADC代碼源),
main.py
# coding=UTF-8
import RPi.GPIO as GPIO
from ADC import ADS1015
from ADC import ADS_POINTER_CONFIG
import time
import math
import smbus
#import serial
COV_RATIO = 0.2 # //ug/mmm / mv
NO_DUST_VOLTAGE = 400 # //mv
SYS_VOLTAGE = 5000
density=0.0
voltage=0.0
#int adcvalue=0
def SendVideo():
ads1015=ADS1015()
state=ads1015._read_u16(ADS_POINTER_CONFIG) & 0x8000 # 氣體傳感器連接確立
if(state!=0x8000):
print("\nADS1015 Error\n")
# 收集氣體資料
GPIO.setmode(GPIO.BOARD)
IN1 = 16
GPIO.setwarnings(False)
GPIO.setup(IN1,GPIO.OUT) # 初始化二極管燈
GPIO.output(IN1,GPIO.LOW) # 關閉二級管燈
#ser = serial.Serial("/dev/ttyAMA0",9600)
#def Filter(m):
while 1:
GPIO.output(IN1,GPIO.HIGH) # 啟動二極管燈
#AIN2_DATA=ads1015.ADS1015_SINGLE_READ(2)
time.sleep(0.00028) # 等待0.28ms
AIN2_DATA=ads1015.ADS1015_SINGLE_READ(2)
#AIN0_DATA=((AIN0_DATA*2-64)/2000.00+0.02)*2
time.sleep(0.00004) # 持續采集0.04ms
GPIO.output(IN1,GPIO.LOW) # 關閉二級管燈
time.sleep(0.00986)
voltage=(5000/1024.0)*AIN2_DATA*1.1*2 # 計算氣體濃度
if(voltage >= NO_DUST_VOLTAGE):
voltage -= NO_DUST_VOLTAGE
density = voltage * COV_RATIO
else:
density = 0
FG="The current dust concentration is:"+str(round(density,2))+" ug/m3"
#FG=voltage
print(FG)
time.sleep(0.100)
# F6=FG.encode('utf-8')
# sock.send(str.encode(str(len(F6)).ljust(16)));
# sock.send(F6)
if __name__ == '__main__':
SendVideo()
ADC.py
#!/usr/bin/python
# -*- coding:utf-8 -*-
import time
import smbus
#i2c address
ADS_I2C_ADDRESS = 0x48
#Pointer Register
ADS_POINTER_CONVERT = 0x00 # 指標_轉換
ADS_POINTER_CONFIG = 0x01 # 指標_配置
ADS_POINTER_LOWTHRESH = 0x02 # 低閾值
ADS_POINTER_HIGHTHRESH = 0x03 # 高閾值
#Config Register
ADS_CONFIG_OS_BUSY = 0x0000 #Device is currently performing a conversion 設備當前正在執行轉換
ADS_CONFIG_OS_NOBUSY = 0x8000 #Device is not currently performing a conversion 設備當前沒有執行轉換
ADS_CONFIG_OS_SINGLE_CONVERT = 0x8000 #Start a single conversion (when in power-down state) 開始單次轉換(在掉電狀態下)
ADS_CONFIG_OS_NO_EFFECT = 0x0000 #No effect 沒有效果
ADS_CONFIG_MUX_MUL_0_1 = 0x0000 #Input multiplexer,AINP = AIN0 and AINN = AIN1(default 系統默認值) 輸入復用器
ADS_CONFIG_MUX_MUL_0_3 = 0x1000 #Input multiplexer,AINP = AIN0 and AINN = AIN3 輸入復用器
ADS_CONFIG_MUX_MUL_1_3 = 0x2000 #Input multiplexer,AINP = AIN1 and AINN = AIN3 輸入復用器
ADS_CONFIG_MUX_MUL_2_3 = 0x3000 #Input multiplexer,AINP = AIN2 and AINN = AIN3 輸入復用器
ADS_CONFIG_MUX_SINGLE_0 = 0x4000 #SINGLE,AIN0
ADS_CONFIG_MUX_SINGLE_1 = 0x5000 #SINGLE,AIN1
ADS_CONFIG_MUX_SINGLE_2 = 0x6000 #SINGLE,AIN2
ADS_CONFIG_MUX_SINGLE_3 = 0x7000 #SINGLE,AIN3
ADS_CONFIG_PGA_6144 = 0x0000 #Gain= +/- 6.144V
ADS_CONFIG_PGA_4096 = 0x0200 #Gain= +/- 4.096V
ADS_CONFIG_PGA_2048 = 0x0400 #Gain= +/- 2.048V(default) 偏差正負2
ADS_CONFIG_PGA_1024 = 0x0600 #Gain= +/- 1.024V
ADS_CONFIG_PGA_512 = 0x0800 #Gain= +/- 0.512V
ADS_CONFIG_PGA_256 = 0x0A00 #Gain= +/- 0.256V
ADS_CONFIG_MODE_CONTINUOUS = 0x0000 #Device operating mode:Continuous-conversion mode 設備運行模式:連續轉換模式
ADS_CONFIG_MODE_NOCONTINUOUS = 0x0100 #Device operating mode:Single-shot mode or power-down state (default) 設備運行模式:單發模式或掉電狀態(默認)
ADS_CONFIG_DR_RATE_128 = 0x0000 #Data rate=128SPS 資料率
ADS_CONFIG_DR_RATE_250 = 0x0020 #Data rate=250SPS
ADS_CONFIG_DR_RATE_490 = 0x0040 #Data rate=490SPS
ADS_CONFIG_DR_RATE_920 = 0x0060 #Data rate=920SPS
ADS_CONFIG_DR_RATE_1600 = 0x0080 #Data rate=1600SPS
ADS_CONFIG_DR_RATE_2400 = 0x00A0 #Data rate=2400SPS
ADS_CONFIG_DR_RATE_3300 = 0x00C0 #Data rate=3300SPS
ADS_CONFIG_COMP_MODE_WINDOW = 0x0010 #Comparator mode:Window comparator 比較器模式:視窗比較器
ADS_CONFIG_COMP_MODE_TRADITIONAL = 0x0000 #Comparator mode:Traditional comparator (default) 比較器模式:傳統比較器(默認)
ADS_CONFIG_COMP_POL_LOW = 0x0000 #Comparator polarity:Active low (default) 比較器極性:低電平有效(默認)
ADS_CONFIG_COMP_POL_HIGH = 0x0008 #Comparator polarity:Active high
ADS_CONFIG_COMP_LAT = 0x0004 #Latching comparator 鎖存比較器
ADS_CONFIG_COMP_NONLAT = 0x0000 #Nonlatching comparator (default) 無鎖存
ADS_CONFIG_COMP_QUE_ONE = 0x0000 #Assert after one conversion 一次轉換后斷言
ADS_CONFIG_COMP_QUE_TWO = 0x0001 #Assert after two conversions 兩次轉換后斷言
ADS_CONFIG_COMP_QUE_FOUR = 0x0002 #Assert after four conversions 四次轉換后斷言
ADS_CONFIG_COMP_QUE_NON = 0x0003 #Disable comparator and set ALERT/RDY pin to high-impedance (default) 禁用比較器并將ALERT/RDY引腳設定為高阻抗(默認)
Config_Set = 0
class ADS1015(object):
def __init__(self,address=ADS_I2C_ADDRESS):
self._address = address
self._bus = smbus.SMBus(1)
def ADS1015_SINGLE_READ(self,channel): #Read single channel data 讀取單通道資料
data=0
Config_Set = ( ADS_CONFIG_MODE_NOCONTINUOUS | #mode:Single-shot mode or power-down state (default) 模式:單觸發模式或掉電狀態
ADS_CONFIG_PGA_4096 | #Gain= +/- 4.096V (default)
ADS_CONFIG_COMP_QUE_NON | #Disable comparator (default)
ADS_CONFIG_COMP_NONLAT | #Nonlatching comparator (default)
ADS_CONFIG_COMP_POL_LOW | #Comparator polarity:Active low (default)
ADS_CONFIG_COMP_MODE_TRADITIONAL | #Traditional comparator (default)
ADS_CONFIG_DR_RATE_1600 ) #Data rate=1600SPS (default)
if channel == 0:
Config_Set |= ADS_CONFIG_MUX_SINGLE_0
elif channel == 1:
Config_Set |= ADS_CONFIG_MUX_SINGLE_1
elif channel == 2:
Config_Set |= ADS_CONFIG_MUX_SINGLE_2
elif channel == 3:
Config_Set |= ADS_CONFIG_MUX_SINGLE_3
Config_Set |=ADS_CONFIG_OS_SINGLE_CONVERT
self._write_word(ADS_POINTER_CONFIG,Config_Set)
#time.sleep(0.01)
data=self._read_u16(ADS_POINTER_CONVERT)>>4
#print(data)
return data
def _read_u16(self,cmd):
LSB = self._bus.read_byte_data(self._address,cmd)
MSB = self._bus.read_byte_data(self._address,cmd+1)
return (LSB << 8) + MSB
def _write_word(self, cmd, val):
Val_H=val&0xff
Val_L=val>>8
val=(Val_H<<8)|Val_L
self._bus.write_word_data(self._address,cmd,val)
main.py代碼中有個time.sleep(0.00986)是我看其他資料說燈有個10ms的周期,也不知道是不是這樣的,最后結果感覺去掉也沒什么不一樣,
不過這個代碼剛運行出來時資料都是(0)ug/m3,說明我的采樣還是有問題的,
例外資料分析
因此筆者注意起了這個燈,燈貌似是看不見它有點亮的,還好筆者有個led燈模塊測驗了一下,排除了自身燈例外的問題,接下來是給出燈的測驗代碼(由于本身的0.28ms太小了,直接看燈是一直亮著的,因此每個延遲函式擴了100倍,能看到燈在閃),
led.py:
# coding=UTF-8
import RPi.GPIO as GPIO
import time
GPIO.setmode(GPIO.BOARD)
IN1 = 16
GPIO.setwarnings(False)
GPIO.setup(IN1,GPIO.OUT)
while 1:
GPIO.output(IN1,GPIO.HIGH)
time.sleep(0.028)
time.sleep(0.004) # 持續采集0.04ms
GPIO.output(IN1,GPIO.LOW) # 關閉二級管燈
time.sleep(0.986)
因此燈的代碼編輯是沒有問題的,所以我把注意力轉移到了ADC采樣上,接下來我只運行了燈的代碼,有萬用表測了一下AOUT與GND的電壓,發現量程都到最低檔了,也就只有周期性的一點的變化,

我的ADC采樣模塊雖然算是精度比較高的,但有可能因為筆者在室內,空氣質量相對較好,測得的粉塵數值因此過于小,采樣的時候沒有捕捉到微量的變化,它既然是測粉塵質量的,那要是粉塵過大,數值應該就上來了,
于是,筆者插了根杜邦線進去,,,,
這一根下去,資料馬上就發生了變化,資料直接達到了300左右,但是會一直維持在300值不變,于是筆者將杜邦線不規則的劃來劃去,數值也相應的發生了變化,如下圖所示,
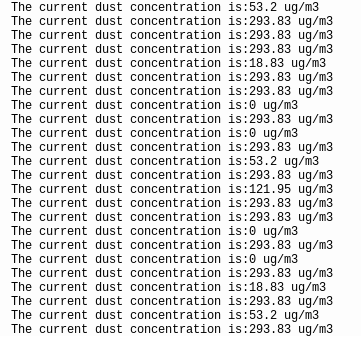
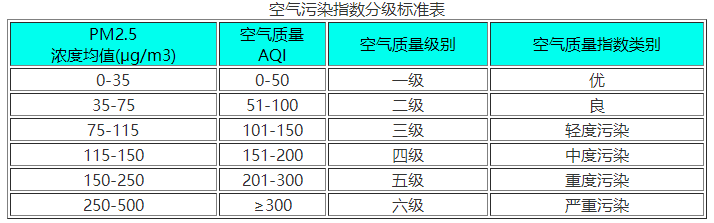
在上圖中筆者發現293.83數值較多,后面筆者將一整個鑰匙插進去,也是這么個數值,這可能是這個模塊的閾值吧,查了查資料對照表,發現300也算是嚴重污染了,
資料分析:
整個記錄做好以后,筆者做出了如下分析:
a.ADC采樣精度不夠,影響了該記錄的大量時間,
b.有可能是這個模塊GP2Y1010AU0F不是特別靈敏了,現在淘寶上還有GP2Y1014AU0F甚至GP2Y1015AU0F的,15版本是用串口收發資料了,不需要管led燈的事情,相對比較方便,這個csdn也有了對應的教程與代碼,
bilibili上筆者也找到了這樣一個視頻[教程]70塊錢搞定樹莓派檢測PM2.5和有害氣體

里面用的ADC采樣模塊是ADS1115,筆者模塊里集成的是ADS1015.他那里的相對較精準一些吧,而且里面有提供外國網站的ADS1115例程鏈接,
測PM2.5的模塊則是GP2Y1014AU0F,可能也會比我這個精準一些,他視頻里面出來的資料也相對較好,筆者既然現在已經買了這兩個搭配,出來的資料也還一般,已經有筆者這樣搭配的模塊可以作為參考,
參考:
樹莓派遠程監控空氣質量
用樹莓派做PM2.5檢測儀–歐姆龍篇
樹莓派傳感器模塊Sense HAT (B)的使用 多傳感器(大氣壓 溫濕度 氣體濃度ADC采樣)集合 通過一個.py檔案運行
基于樹莓派的空氣監測系統(3)PM2.5模塊程式
總結:
現在筆者能出資料,說明模塊內的ILED燈是正常的,但肉眼確實看不到,
硬體編程上資料出現問題排查起來還是非常困難的,其實我這個結果 一直都只是因為精度不夠,資料其實還是可以出來的,離成功只差一根杜邦線而已,不過對問題的分析與排查還是需要在硬體與代碼上綜合分析,希望我的記錄能對讀者有一定的幫助,
感謝各位觀看,如有不足,歡迎在評論內留言與討論,如果覺得寫得好的,可以給我點贊+收藏+關注哦,再次感謝各位!

轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/256871.html
標籤:其他