??大家好,我是小政,之后的一系列文章我將介紹我玩平衡小車的程序以及遇到的一些問題,將這些內容記錄下來分享給大家,也讓大家少走一些彎路,接下來我將從硬體框架選擇、軟體編程、PID演算法、PID調參、藍牙遙控這五個部分向大家講解平衡小車的制作程序,
??本系列平衡小車文章適合于剛剛學習STM32但感覺沒有玩透,想找個專案練練手,那么平衡小車絕對適合你,同時也適合于對于平衡小車感興趣但編程和硬體基礎較差,沒有關系,跟隨小政將讓你輕松學會制作一個屬于自己的平衡小車,
??第一篇文章我會首先介紹平衡小車的硬體組成,對硬體原理圖進行詳解,
一、硬體結構
1. 主控板:主控芯片(STM32F103C8T6)+電機驅動芯片(TB6612FNG),利用AD20畫的PCB并進行打板,
2. 小車框架:平衡車底盤、電機、輪子(某寶有售)
3. 電池:獅子航模電池2200mAh11.1V35C,T母頭
4. DC-DC降壓模塊:MP1584EN,3A可調降壓穩壓電源模塊
5. 陀螺儀:MPU6050,檢測傾斜角度
6. OLED:4線I2C OLED顯示屏
7. 超聲波模塊:HC-SR04
8. 藍牙:HC-05
二、硬體原理圖
??硬體原理圖我利用Altium Designer 20畫的,并進行了PCB打板,想要獲取原理圖的小伙伴可以去我的百度網盤下載,
網址:https://pan.baidu.com/s/1E2a2KtL8YuAmTfuQZtPhMg
提取碼:5hvl
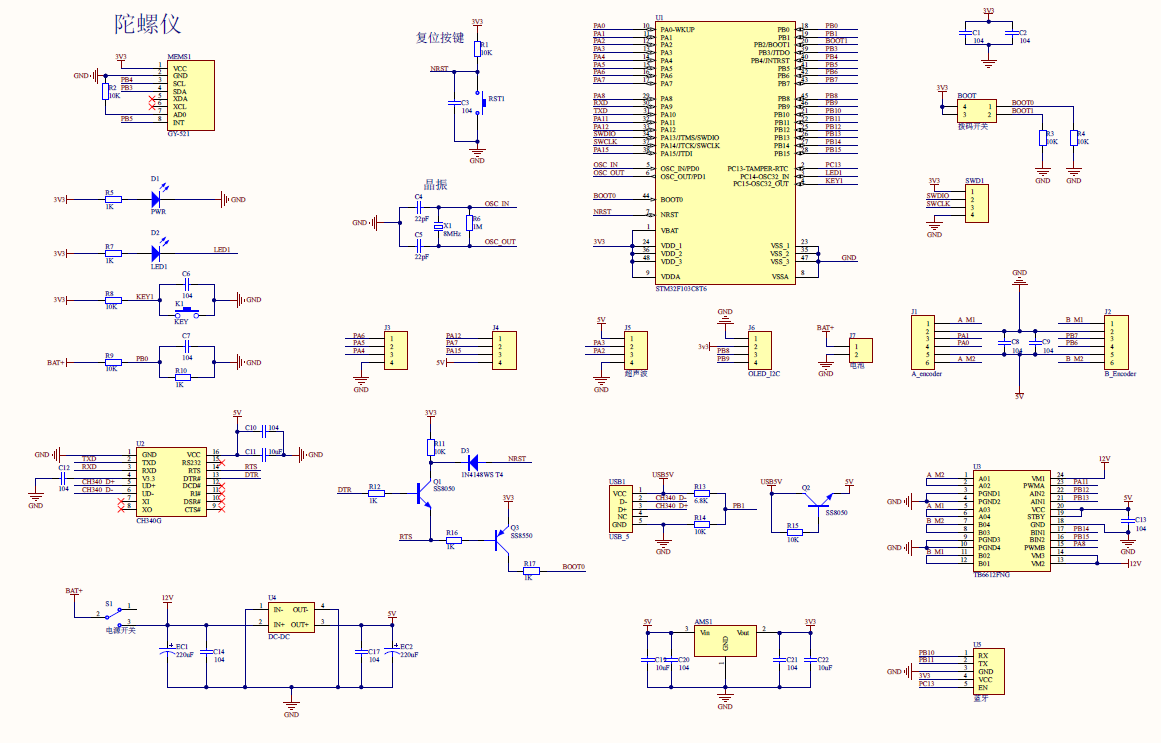
三、硬體框架講解
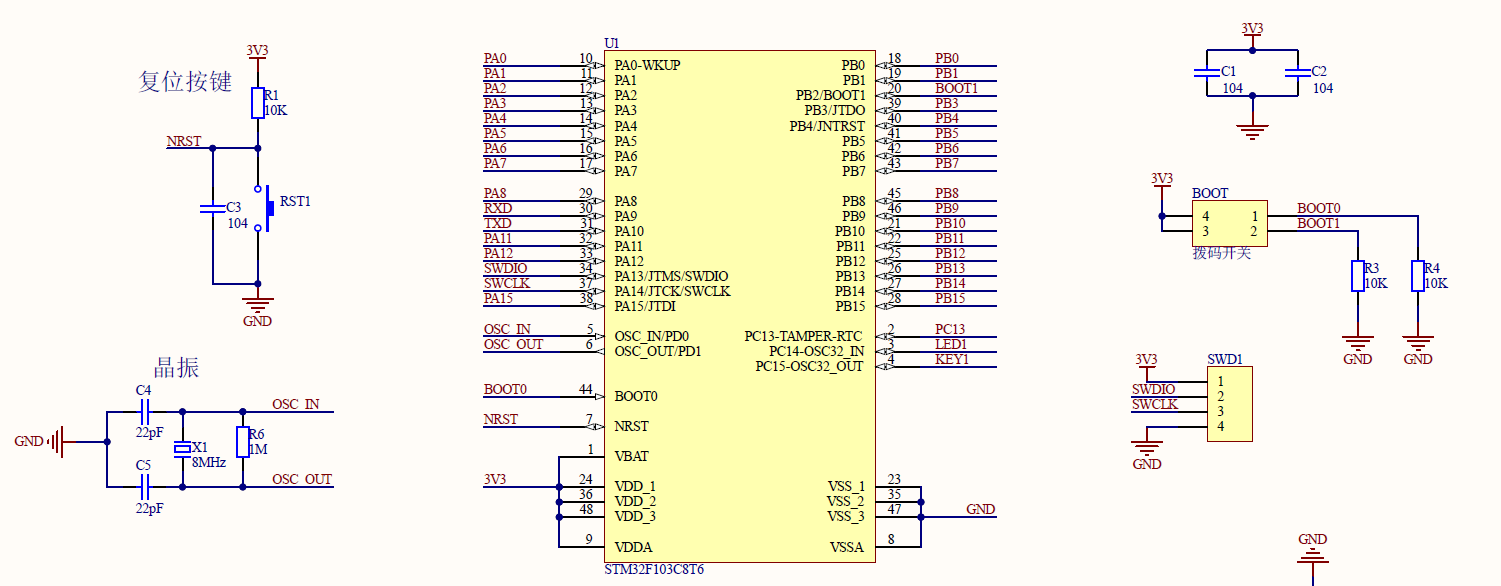
(1)STM32F103C8T6
主控芯片及周圍電路結構如下:
1)STM32F103C8T6(48腳芯片)
2)8M晶振(STM32內部倍頻至72MHz,產生供系統正常作業的穩定的脈沖信號),
3)復位電路(RST)
4)啟動模式選擇電路(BOOT0和BOOT1)
5)去耦電容(3.3V與GND之間加幾個104電容)
6)燒寫電路(SW)
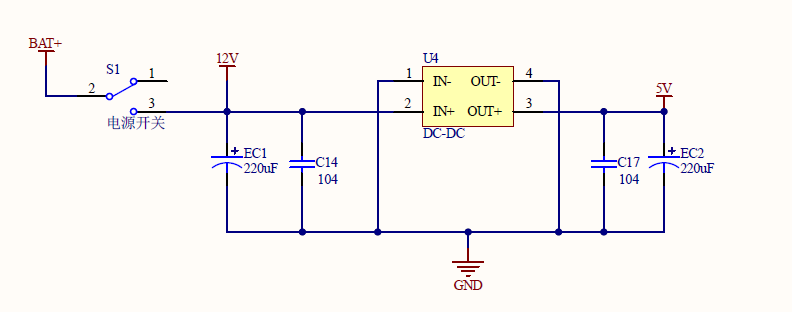
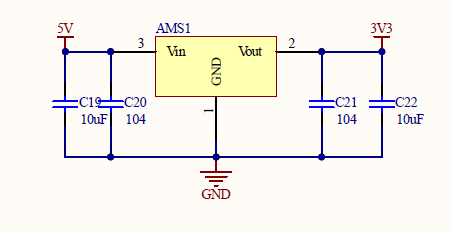
(2)電源電路
?? 電源采用11.1V鋰電池供電,通過DC-DC降壓模塊獲取5V電壓,在通過AMS1117降至3.3V,圖中電解電容主要目的是濾低頻紋波,瓷片電容主要目的是抑制高頻噪聲,需靠近管腳,
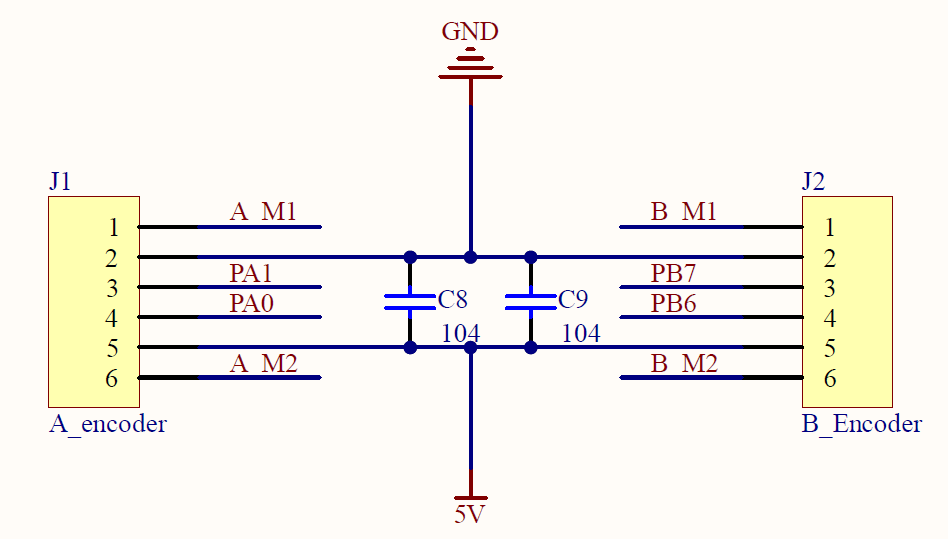
(3)編碼器
作用:實時檢測電機速度
編碼器1——PA0/PA1——TIM2
編碼器2——PB6/PB7——TIM4
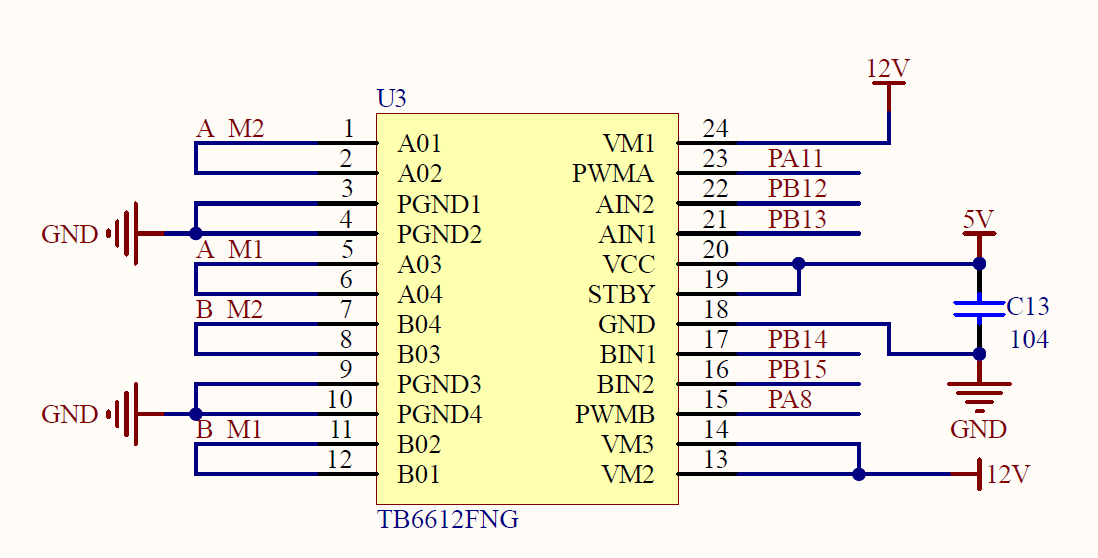
(4)電機驅動芯片TB6612FNG
作用:驅動電機正常運行
PWM1——PA8
PWM2——PA11
電機1——PB12/PB13
電機2——PB14/PB15
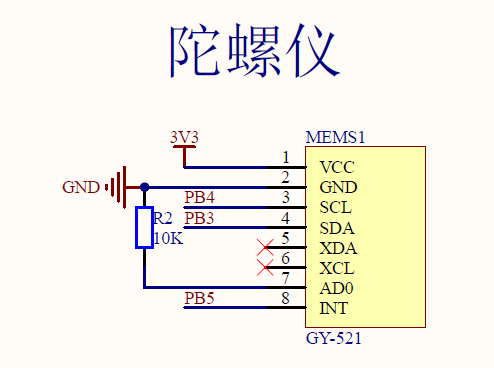
(5)陀螺儀MPU6050
作用:檢測傾斜角
MPU6050中斷引腳——PB5
MPU6050所用I2C——PB3/PB4
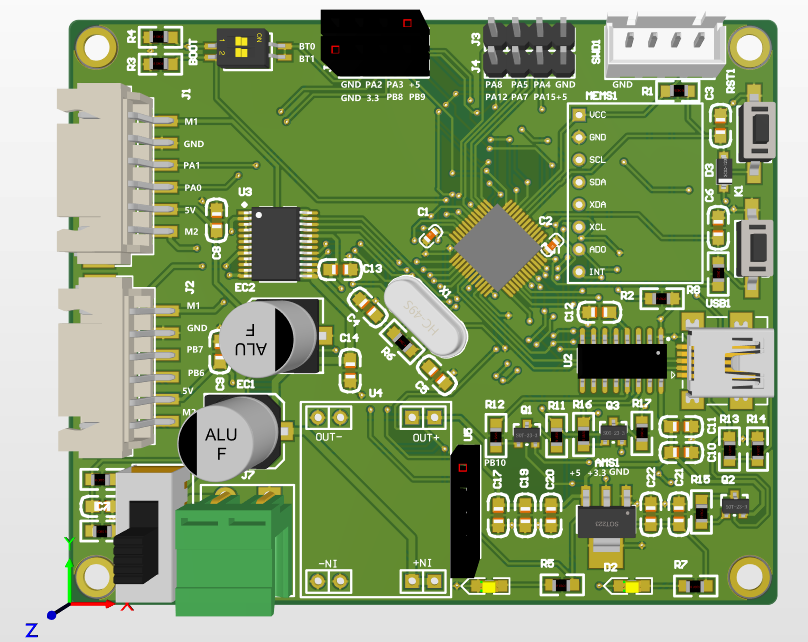
四、實物展示
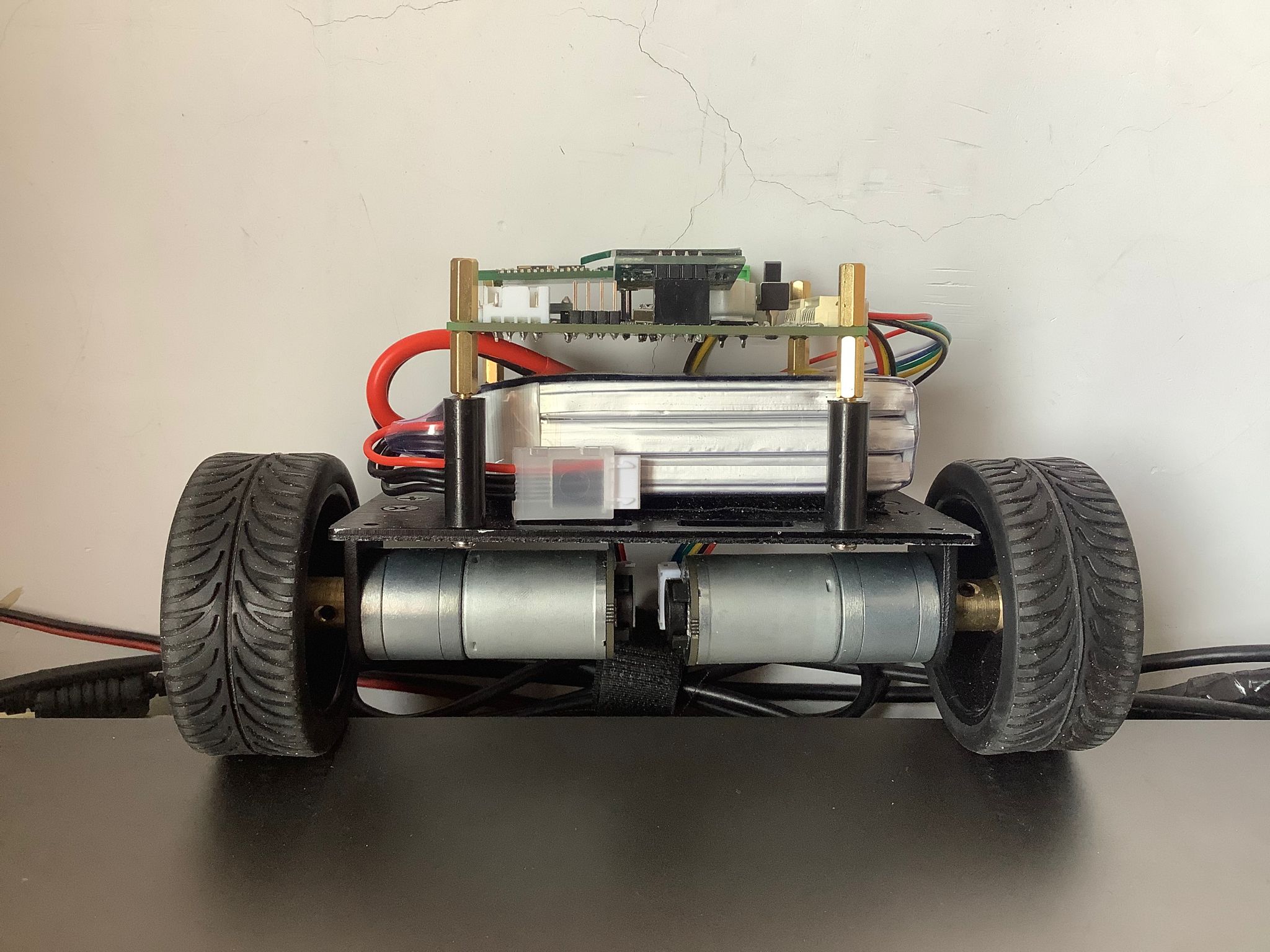


??以上就是硬體結構的講解,接下來的文章將對軟體的編程和演算法設計進行詳解,文章中出現錯誤或者小伙伴對以上內容有所疑問,歡迎大家在評論區留言,小政看到后會盡快回復大家!
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/259009.html
標籤:其他
上一篇:[GO語言基礎] 四.算術運算、邏輯運算、賦值運算、位運算及編程練習
下一篇:2021-02-11