多旋翼飛行器學習筆記
一、多旋翼基本組成
1.1機架(機身、起落架、涵道)
1·機身
機身要考慮的有:尺寸、布局、材料、強度、重量,
指標引數包括:重量、軸距(外圈電機圍城圓的直徑)、布局、材料,
| 幾種常見材料引數屬性 | ||||||
| 碳纖維 | 玻璃鋼 | 聚碳酸酯 | 丙烯酸塑料 | 鋁合金 | 輕木 | |
| 密度(1b/cuin) | 0.05 | 0.07 | 0.05 | 0.04 | 0.1 | 0.0027-0.0081 |
| 剛度(Msi) | 9.3 | 2.7 | 0.75 | 0.38 | 10.3 | 0.16-0.9 |
| 強度(Ksi) | 120 | 15-50 | 8-16 | 8-11 | 15-75 | 1-4.6 |
| 價錢(10:最便宜) | 1 | 6 | 9 | 9 | 7 | 10 |
| 加工(10:最容易) | 3 | 7 | 6 | 7 | 7 | 10 |
剛度:彈性模量表示是材料在彈性變形階段,其應力和應變成正比例關系;形變越難改變,剛度越大,
強度:抗拉強度就是試樣拉斷前承受的最大標稱拉應力,
2·起落架
·作用:
1、支撐多旋翼重力
2、避免螺旋槳離地面太近而發生碰撞
3、減弱起飛時的地效
4、消耗和吸收多旋翼在著陸時的撞擊能量,
地效:地面效應(Ground effect)亦稱為翼地效應 (Wing-In-Ground effect,WIG)或翼面效應(Wing-In-Surface-Effect,WISE),運動物體貼近地面運行時,地面對物體產生的空氣動力干擾,當飛行器接近地面飛行或運行時,地面影響到空氣繞飛行器的流動特性,地面效應可產生于低空飛行的飛機或直升機,汽車和汽艇也存在這種效應,
3·涵道
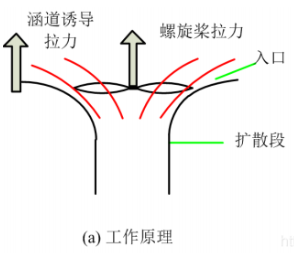
·作用:
1、保護槳葉和人身安全
2、減少噪聲
3、增加拉力效率
4、減少螺旋槳高速旋轉時,翼尖渦流帶來的損失
·引數:
1、擴散段長度
2、螺旋槳直徑
1.2動力系統(電機、電調、電池、螺旋槳)
1·螺旋槳
·指標引數:
1、型號:螺旋槳一般由4個數字組成,前兩位是直徑,后兩位是螺距,如APC 1045(10*45)槳的直徑為10英寸,螺距為4.5英寸,
螺距:螺旋槳在不能流動的介質里旋轉一圈所前進的距離,也稱槳距,
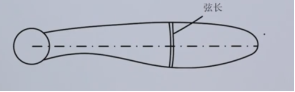
2、弦長:一般選擇螺旋槳半徑2/3處的弦長作為標稱弦長,
3、轉動慣量:較小的轉動慣量可以提升電機的回應速度,從而提升多旋翼的性能,較小轉動慣量的螺旋槳還可以節省能量,
4、槳葉數:二葉槳力效大于三葉槳,但是最大拉力相同的前提下,二葉槳直徑比三葉槳大,
5、安全轉速:轉速超過定值,具有柔性的槳葉可能會發生形變,導致效率降低,
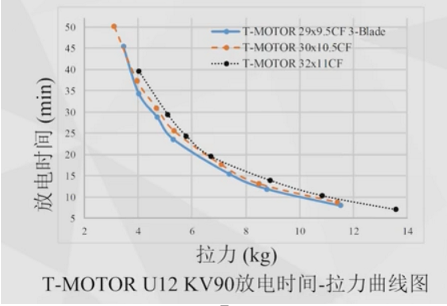
6、螺旋槳力效:力效(g/W)=拉力(g)/機械功率(W)
機械功率(W)=輸出力矩(N·m)*螺旋槳轉速(rad/s)
·靜平衡和動平衡:
靜平衡:螺旋槳重心與軸心線重合時的狀態,它能保證螺旋槳置于平衡器上,在任何角度都能夠自行靜止,
動平衡:螺旋槳重心與其慣性中心重合時的狀態,在旋轉時不產生偏心力,
2·電機
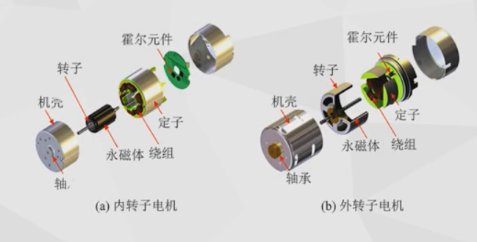
電機主要使用無刷直流電機,其又分為內轉子電機和外轉子電機,外轉子電機可以提供更大的力矩,用來驅動大螺旋槳,
·指標引數:
1、尺寸:
電機的尺寸取決于定子的大小,由一個四位數字表示,如2205(或22*05)電機,前兩個數字代表定子直徑,后兩個代表定子高度,直徑為22mm,高度為5mm,
2、標稱空載KV值:
無刷直流電機的KV值是指在空載情況下,外加1V電壓得到的電機轉速值(轉速單位:RPM ,轉/分鐘)
KV值小的電機可以產生更大的力矩,因此,大螺旋槳通常采用KV值小的電機;小型螺旋槳可以選擇KV值大的電機,
3、標稱空載電流和電壓:
在空載(不安裝螺旋槳)試驗中,對電機施加空載電壓(通常為10V)時測得的電機電流稱為空載電流,
4、最大電流/功率:
最大峰值(瞬時)電流/功率:電機能承受的最大瞬時通過的電流/功率,
最大連續(持續)電流/功率:電機能允許的持續作業(規定時間)而不啥訓的最大連續電流/功率,如:25A/30s表示:電機在25A的電流下,最多作業30s,超過30s就可能會被啥訓,
5、內阻:
電機電樞本身存在內阻,雖然內阻很小,但是由于有時電機通過的電流很大甚至可以達到幾十安培,所以,該內阻不可忽略,
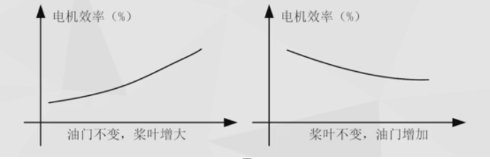
6、電機效率:(評估電機性能的一個重要引數)
電功率(W)=電機輸入電壓(V)*電機電流(A)
電機效率=機械功率(W)/電功率(W)
7、總力效:
總力效(g/W)=螺旋槳拉力(g)/電功率(W)=螺旋槳力效*電機效率
3·電調(電子調速器,ESC)
·作用:
1、電調最基本的功能就是電機調速(飛控板將PWM波信號發送給電調,用來調控電機轉速)
2、為遙控接收器上其他通道的舵機供電
3、充當換向器的角色(無刷直流電機沒有電刷進行換相,需要電調進行電子換相,電調將直流電源轉化成三相電源)
4、電調還有一些其他輔助功能,如:電池保護、啟動保護、剎車等,
·指標引數:
1、最大持續/峰值電流:無刷電調的主要引數是電調的功率,通常以安數A來表示,如10A、20A、30A,不同電機需要配備不同安數的電調,安數不足會導致電調甚至電機被啥訓,
最大持續電流指的是在正常作業模式下的持續輸出電流;峰值電流指的是電調能承受的最大瞬時電流,
2、電壓范圍:電調能夠正常作業的所允許輸入的電壓范圍也是非常重要的引數,一般在電調說明書上可以看到標注例如“3-4S LiPo”字樣,表示這個電調適用于3到4節電芯串聯的鋰聚合物電池,也就是說它的電壓范圍為11.1V-14.8V,
3、內阻:電功率與電流平方成比例,所以電調的散熱性能十分重要,因此,大規格電調內阻一般都比較小,
4、重繪頻率:最初為航模設計的電調,采用50Hz重繪頻率,由于多旋翼不適用舵機驅動,電機由電調直接驅動,回應速度很高,有些用于多旋翼的電調重繪頻率高達500Hz,
5、可編程特性:
·可通過編程卡直接設定電調引數
·通過USB連接,用電腦軟體設定電調引數
·通過接收器,用遙控器搖桿設定電調引數
6、兼容性:如果電機和電調兼容性不好,會發生堵轉,即電機不能堵轉,
·電調的驅動方式:方波驅動和正弦波驅動
·方波驅動:方波是數字信號,控制元件作業在開關狀態,電路簡單、容易控制、發熱量小等優點,數字電路容易控制,正弦波屬于模擬信號,模擬信號控制相當復雜,而且控制元件作業在放大狀態,發熱嚴重,
·正弦波驅動(矢量控制):正弦波驅動是趨勢,正弦波驅動在運行平穩性、調速范圍、減震減噪方面優于方波驅動,目前可采用光電編碼器、霍爾傳感器或者基于觀測器的方法測量轉子角度,因為多旋翼電機始終作業在高轉速狀態下,可以基于觀測器的方法進行矢量調制,節約成本,
4·電池
常見的有鋰聚合物電池(LiPo)和鎳氫電池(NiMh),小型飛行器專用的鋰聚合物電池,單節電芯的標稱電壓為3.7V,滿電可達4.2V,通常設定放電后的保護電壓為3.6V,然而多旋翼所需電壓可能達到十幾或者幾十伏,為了獲得足夠的電池電壓和容量,廠商通常會將電芯串并聯在一起,組成電池組,鋰電池組通常包括兩個部分:電池和鋰電池保護線路,
電芯串聯可以獲得更大的電壓,而容量保持不變;電芯并聯可以獲得更大容量,而電壓保持不變,
電壓不是常數:持續的放電會導致電壓下降;電機內阻分壓,在大電流時分壓也大,
·指標引數:
1、電壓:
單節電芯電壓3.7V,3S1P表示3片鋰聚合物電池的串聯,電壓是11.1V,其中:S是串聯,P表示并聯,又如2S2P表示2片鋰聚合物電池的串聯,然后兩個這樣的串聯結構并聯,總電壓是7.4V,電流是單個電池的兩倍,
2、容量:
電池的容量是用毫安時來表示的,比如:5000毫安時的電池表示該電池以5000毫安的電流放電可以持續一個小時,但是隨著放電的持續進行,電池的放電能力在下降,其輸出的電壓在緩慢下降,所以導致其剩余容量與放電時間并非是線性關系,
實際作業中檢測電池電壓的兩種方法:1)檢測電池單節電壓 2)實時檢測電池輸出電流做積分運算,
注意:單節電芯充滿電電壓為4.2V,放電完畢后會降低至3.0V(再低可能過放導致電池損壞),一般無人機在3.6V時會對電量進行報警,
3、放電倍率:
一般充放電電流的大小常用充放電倍率來表示,即充放電倍率=充放電電流/額定容量
例如:額定容量為100Ah的電池,用20A放電時,其放電倍率為0.2C,
電池放電倍率是表示放電快慢的一種量度,越大表明放電越快,所用的容量1小時放電完畢,稱為1C放電;5小時放電完畢,稱1/5=0.2C放電,容量5000毫安時的電池最大放電倍率為20C,其最大放電電流為100A,
·鋰聚合物電池屬于高倍率電池,可以給多旋翼提供動力,
·放電電流不能超過其最大電流限制,否則可能會啥訓電池,
4、內阻:
電池內阻不是常數,在充放電程序中隨時間不斷變化,不是線性關系,隨電池密度的對數增大而線性增加,
電池內阻很小,一般用毫歐來定義,正常情況下,內阻小的電池放電能力強,內阻大的電池放電能力弱
5、能量密度:
能量密度是指在一定的空間或質量的物質中儲存能量的大小,(鋰離子電池能量密度高)
1.3指揮控制系統
1·遙控器和接識訓
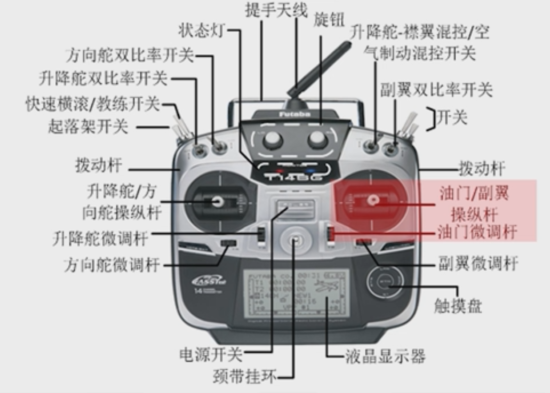
·作用:
1、遙控器發送飛控手的遙控指令到接收器上,接識訓解碼后傳給飛控板,
2、遙控器可以進行一些飛行引數的設定,
3、高級功能有航模回傳的電池電壓電流資料等,
·指標引數:
1、頻率:
常用的無線電頻率是72MHz和2.4GHz,目前采用的最多的是2.4GHz遙控器,2.4GHz技術屬于微波領域,有以下優點:頻率高、同頻率幾率小、功耗低、體積小、反應迅速、控制精度高,2.4G直線性能好,避讓障礙物性能差,
2、調制方式:
PCM,脈沖編碼調制,又稱脈碼調制,為信號脈沖編碼方式,優點:有很強的抗干擾性,很方便的計算機編程,不增加或少增加成本,實作各種智能化設計,
PPM,脈沖位置調制,又稱脈位調制,為高頻電路的調制方式,相比PCM編碼,PPM比例遙控設備實作相對簡單,成本較低,但易受干擾,
3、通道:
一個通道對應一個獨立的動作,油門、偏航、俯仰、滾轉控制至少需要4個通道,再加上云臺等,一般為6通道或10通道,
4、控制模式:美國手和日本手

5、油門:
·直接式油門:油門桿不會自動回中,最低點為0油門,最高為100%油門,這種油門主要對應的是期望的推力大小
·增量式油門:松手后油門會自動回中,
6、遙控距離:
使用帶有功率放大模塊、功率鞭狀天線可以增大遙控器的控制距離,
遙控器開源專案網站:
http://www.os-rc.com/
http://www.open-tx.org/
http://www.reseau.org/arduinorc/
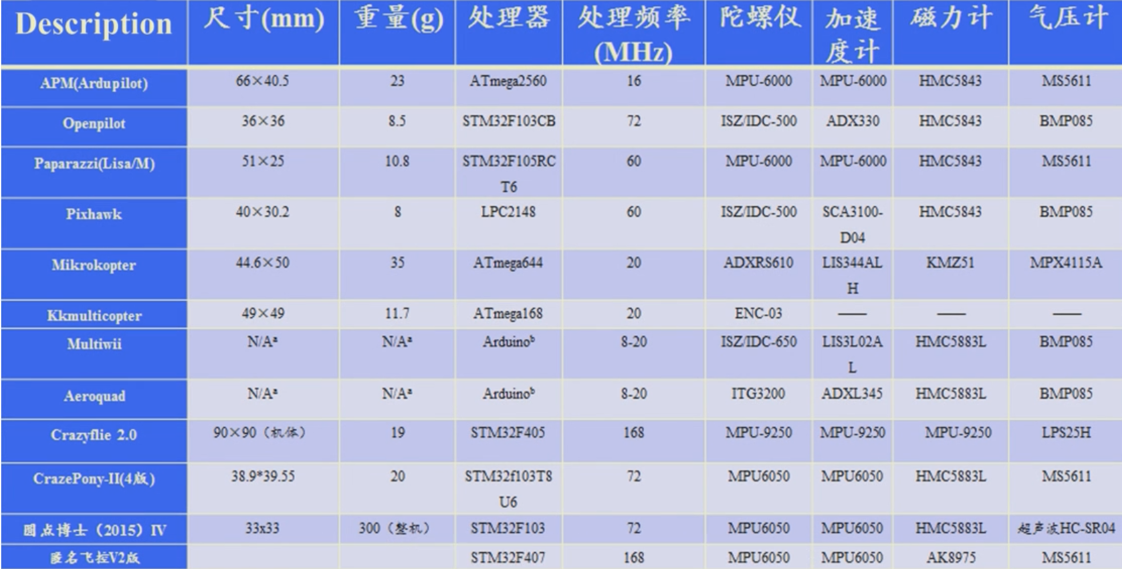
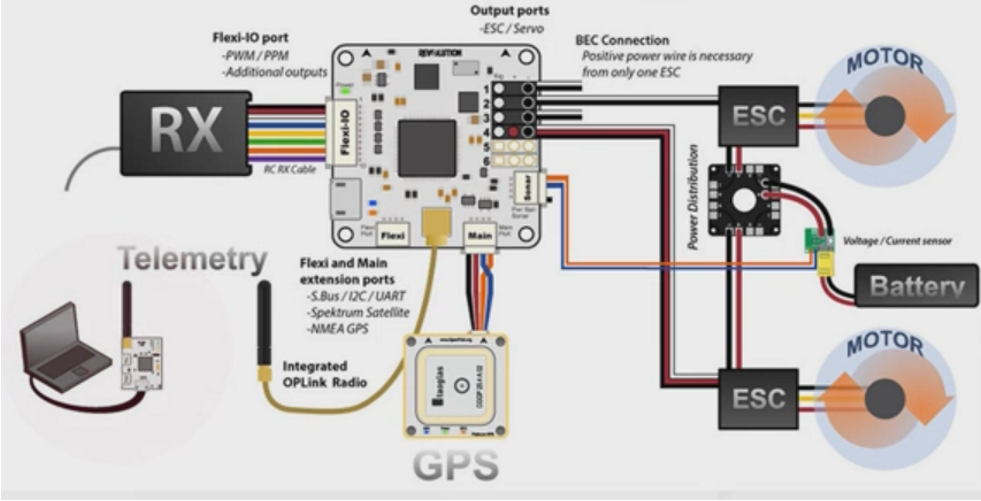
2·自動駕駛儀
·組成:分為硬體和軟體
1、全球定位系統(GPS)接收器
2、慣性測量單元(IMU),包括三軸加速度計、三軸陀螺儀、電子羅盤(或三軸磁力計),目的是得到多旋翼的姿態資訊,(六軸IMU為三軸加速度計+三軸陀螺儀;九軸IMU為三軸加速度計+三軸陀螺儀+三軸磁力計;十軸IMU為九軸IMU的基礎上加了氣壓計)
3、氣壓計和超聲波測距模塊,可以得到多旋翼的絕對或相對高度,
4、微型計算機(單片機),用于演算法實作,
5、介面,用于傳感器、電調、通訊設備等,
·作用:
1、感知:解決“多旋翼在哪”這個問題,得到準確的位置和姿態資訊,
2、控制:解決“多旋翼怎么去”的問題,首先得到準確的位置和姿態,之后根據任務,通過演算法設計出控制量,輸出給電調,進而控制電機轉速,
3、決策:解決“多旋翼去哪”這個問題,
開源自駕儀網址


自駕儀的硬體部分
3·地面站
地面站主要作為全自主飛控方式下的地面操控設備,由軟硬體組成,
·作用:
1、地面站軟體是地面站的重要組成部分
2、操作員通過地面站系統提供的滑鼠、鍵盤、按鈕和操控手柄等外設來與地面站軟體進行互動
3、預先規劃好本次任務的航跡,對多旋翼的飛行程序中飛行狀況進行實時監控和修改任務設定以干預多旋翼飛行
4、任務完成后,還可以對任務的執行記錄進行回放分析
開源地面站軟體可以從開源自駕儀網站上下載
4·數傳電臺
數傳電臺是指借助DSP技術和無線電技術實作的高性能專業資料傳輸電臺,采用數字信號處理、數字調制解調、具有前向糾錯、均衡軟判決等功能的無線資料傳輸電臺,(保持自駕儀與地面站的雙向通信)
·指標引數:
1、頻率:可選擇433MHz或915MHz,美洲地區用915,歐洲和中國用433,對915是禁用的,
2、傳輸距離
3、傳輸速率
·通訊協議:
MAVLink通訊協議是一個為微型飛行器設計的非常輕巧的、只由頭檔案構成的資訊編組庫,(由MAVLink開發出的軟體可以私有)
除此之外,Openpilot自駕儀采用了UAVTalk協議與地面站進行通訊,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/259010.html
標籤:其他