基于STM32F1掛載四個激光測距模塊分時輪流作業(不通過IIC版本)
第一次寫“回憶錄”,請多多指教,阿里嘎多,那我下面就按自己做的來嘍!
1.硬體資源:
正點原子的一塊STM32F1精英版,四個激光測距模塊,當然為了方便起見,我還買了stlink仿真器和lcd顯示屏(價格多150元左右,當然大佬可以不買哦,譬如可以用串口看距離值啥的)
2.軟體資源:
Keil uVision5 (用來敲代碼控制硬體資源的平臺),最好還有個C語言編譯器如visual C++或Dev-C++等等,都行(主要是為了除錯有些C程式,里面的有些邏輯可能忘了可以在這個C語言平臺上先除錯除錯,免得經常燒板子……)
3.閱讀資料:
1.買完32板子,正點原子送你一大堆關于32的檔案(我就看了里面的“STM32F1開發指南(精英版)-庫函式版本_V1.2 ” 和 “程式原始碼中的庫函式版本” 這兩份pdf……),
2.買完激光測距模塊,又是一堆關于激光測距模塊的資料(我又就看了“模塊使用說明”中的適用于對應板子的資料(我用的是“ATK-VL53L0X激光傳感器模塊使用說明( 戰艦V3&精英板 )_AN1703A”)和“ATK-VL53L0X激光測距模塊用戶手冊_V1.0” 這兩份……),
3.一本大一學的非計算機專業的C語言教材,
不過,這三份資料夠用了,
4.開始入手一個激光模塊:
*1.*學習商家給的激光測距的程式原始碼
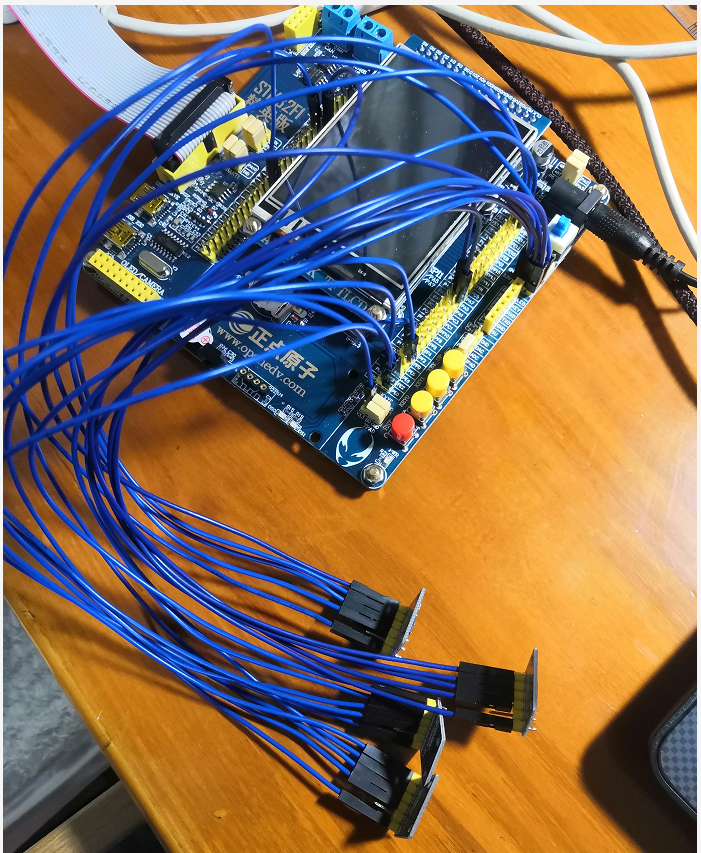
首先,你會發現當你買完激光測距模塊,商家給了你一堆資料,里面有一個很重要的檔案——程式原始碼,雙擊,找到適合你板子的擴展實驗,我這里用的是“標準庫版本,適合精英STM32開發板”,繼續雙擊,里面就有了已經撰寫好的代碼,這時候你只需要把激光模塊正確插到板子上,點擊運行即可,你可以按照下圖將板子與激光模塊對應的埠用杜邦線連起來,或者也可以直接把激光模塊的六個埠直接插到板子的右中側(ATK MODULE),其實這兩種方法連的位置是一樣的,因為板子上的這六個埠是一一對應的,用的是同一個IO口,只是在電路板制作程序中通過內置的電路連在了一起(我啰嗦了……)
圖一
當然這只能讓一個激光測距模塊作業,如果你有lcd顯示屏,你會發現上面寫了三個主要內容供你選擇:校準,普通測量,中斷測量,顯然,剛剛把東西買到手的你或許不是很清楚這都是些啥,所以,現在開始,你需要:
1.認真閱讀商家給的這個程式代碼,代碼有很多,但是我只用了其中一點點就夠了(如果你不打算掌握其中的原理啥的話……可以參考我看的這幾個):
圖二:
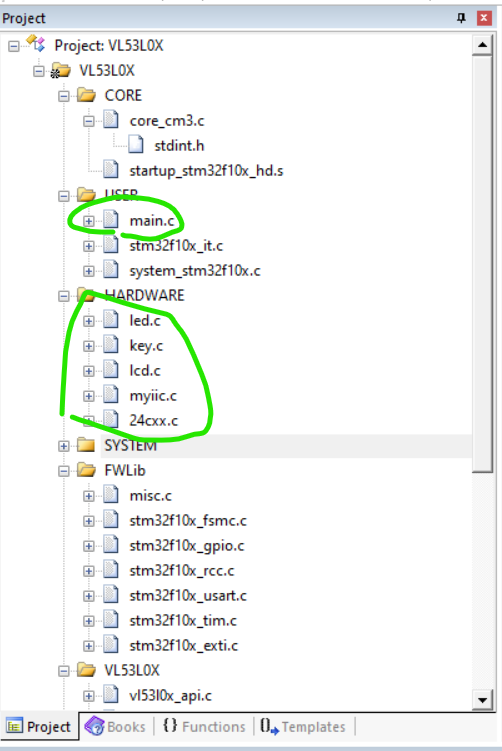
上面加綠色圈圈的.c檔案和對應的.h檔案,
2.并且結合商家給的激光模塊的資料,主要是“模塊使用說明”中的適用于對應板子的資料(我用的是“ATK-VL53L0X激光傳感器模塊使用說明( 戰艦V3&精英板 )_AN1703A”)和“ATK-VL53L0X激光測距模塊用戶手冊_V1.0” 這兩份,
3.你得邊看代碼、邊看pdf、邊多試試它怎么作業的,隨便按按鍵,再看對應螢屏的顯示,然后你會發現它的作業流程,從而也能大致知道程式代碼的框架,
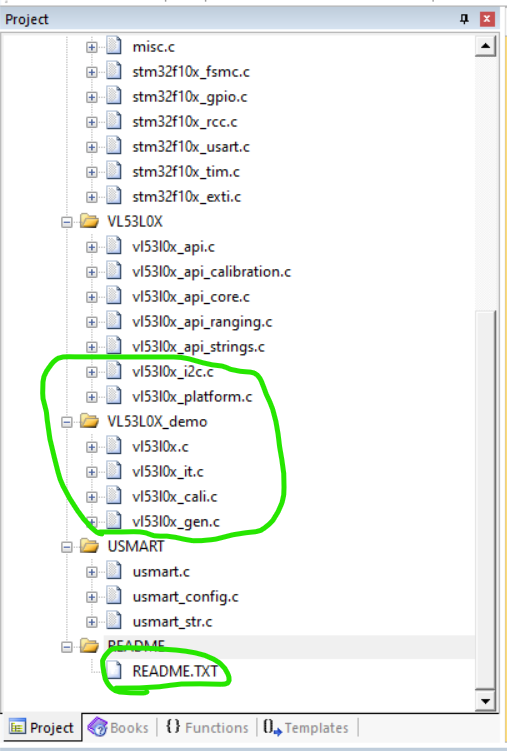
圖三:
4.你得有一個比較好的C語言基礎,有較好邏輯思路,因為我在改代碼的時候經常得去翻翻當年的C語言教材,好幾次沒有思路不知道怎么改的時候就是在隨意翻看C語言教材的時候迸發了靈感,你可以先看一下位運算、函式定義與呼叫(有參函式、無參函式、有輸出函式、無輸出函式)、回圈結構、選擇結構、宏定義、變數的作用域(如全域變數、區域變數,需要用到static),
好了,在這個環節中,主要要搞清楚程式代碼的大致結構,尤其是我圈出來的那一些,并且知道實作某部分功能對應了上面的哪部分圈圈即可,順便又復習了一下C語言的那一些內容,然后就可以信心滿滿的進入下一個程序,
*2.*開始逐步修改原來的能控制單個模塊作業的代碼
從現在開始,我們得試著去修改代碼,逐步修改成能讓四個激光模塊分時作業,并且獲得這四個距離值,聽上去是不是覺得又有點復雜?別急,我們分幾步走,
1.學會分配IO口,自己試著把原先圖一中的IO口替換成其他IO口,
首先你得在我剛剛圈出來的幾個.c和.h檔案中找找哪邊需要用到IO口,這里推薦看一下買32板子送的資料
2.選擇其中一種測量方式進行深入研究,
這里我選了普通測量(vl53l0x_general_test)模式,在圖三中可以進一步發現,這兩種測量模式(中斷測量和普通測量)是完全獨立、互不影響的,我甚至在最后把用于中斷測量的那個埠(INT)壓根沒接,普通測量模式依舊正常運行……
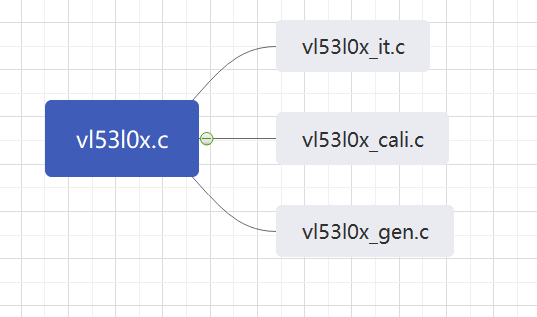
圖四
你需要仔細研究vl53l0x_gen.c檔案與vl53l0x.c檔案和main.c檔案以及這三個檔案對應的.h檔案之間的關系,并且大致知道這個作業流程,即main.c檔案中的vl53l0x_test()是怎么到了vl53l0x.c檔案,以及vl53l0x.c檔案中的l53l0x_general_test(&vl53l0x_dev)又是怎么到了vl53l0x_gen.c檔案(emmm我好像已經把最主要的說了……),
還有你得大致知道這些檔案中一個又一個函式大致起的啥作用,譬如vl53l0x_start_single_test()函式是在測一次距離,由于這個函式被包含在了while(1)這個無限回圈函式中,所以才會導致你之前可以在顯示屏上看到的連續測量,
你當然還得知道測量值放在哪個引數中(Distance_data),因為之后的操作都是圍繞這個測量值展開的,
(選中某個被用到的函式名,雙擊,右鍵,多使用Go To Definition Of……和Go To Reference To……來查看函式的前世今生)
3.學會把測量值Distance_data值回傳并能使用
我是把所有距離最終都回傳到了主函式并在主函式中進行了使用,如圖五:
圖五:
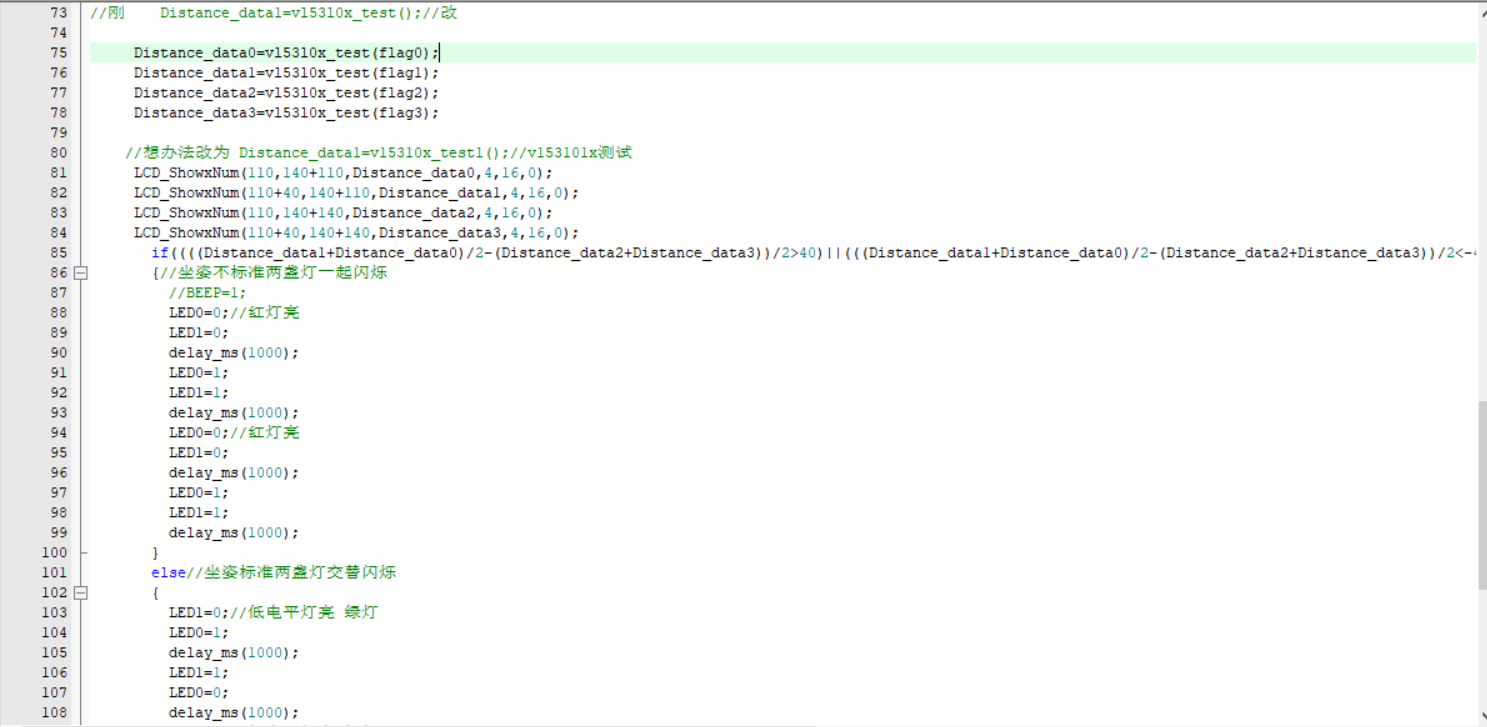
文末有我寫的代碼,大家如果有需要的話可以下載 ^ _ ^
由于正點原子給的關于激光測距模塊的程式原始碼中關于Distance_data的參考都是直接輸出在lcd螢屏上,而沒有對其數值進行參考(指沒有拿這個距離值去做其他事情:譬如距離值大于XX時候led燈閃爍啥的,當然,如果是要參考一個激光模塊使用它的距離值去做其他事情肯定不復雜,只要在出現Distance_data的地方參考一下就好了,但是,如果是四個激光模塊資料,為了可以重復參考用于測量的那個函式,不如想辦法把這個距離值像圖五那樣回傳到主函式去使用……)
所以,如果你要像我這樣做,你亟待解決的問題是:把好多void 函式名(void)或者void 函式名(形參) 分別轉變為 vu16 函式名(void)或者vu16 函式名(形參),vu16是回傳值的數值型別,最終一步步把這個距離Distance_data回傳到主函式去使用,
為了檢驗是否回傳成功,你可以在主函式寫個if陳述句,譬如當Distance_data>40,紅燈閃爍,else,綠燈閃爍,
好啦,這部分就交給你自己嘍,相信你手頭有一本C語言教材的話,這個問題是不難解決噠!
4.選擇其中一種模式,讓它能夠自動回圈測量
你是不是發現,每次只能測一個值了,或許你可以把這個值讓它顯示在初始界面上(也就是在main.c檔案的 while(1) 中加一行LCD_ShowxNum(110,140+110,Distance_data0,4,16,0);
而且初始界面一直在閃爍,但是內容一樣,它還需要你按按鍵來選擇作業模式,但是按鍵有時候似乎不那么靈敏了,你可以想想為啥?
這樣反倒有點不大方便了,所以,為了讓它能自動測量,你可以選擇其中某種模式,譬如這里我選了“普通測量”模式,然后在它掃描哪個按鍵按下的地方(有兩處,用的是case陳述句)讓某個按鍵按下的代碼恒成立,這樣它就不需要等你按下按鍵再去執行測量啦!
如果你感覺有些你想要看到的內容閃去得太快,你還可以在任意你想延時的地方加一堆delay_ms( )
至此,你應該已經掌握了
1.功能和程式代碼之間的對應關系(剛剛那幾個圈圈)
2.如何分配IO埠
3.如果讓距離值回傳并使用
4.如何讓某種測量模式自動回圈進行
—————————————————————————————————
5.逐步修改程式讓兩個激光模塊分時自動回圈作業:
恭喜你來到第五個步驟,你離成功已經很近了
在這個環節里,我們只需要解決一個問題,就是在原本main.c函式中紅圈2的基礎上多一個標志flag,如紅圈3,這個flag只有一個作用,那就是選擇埠,
圖六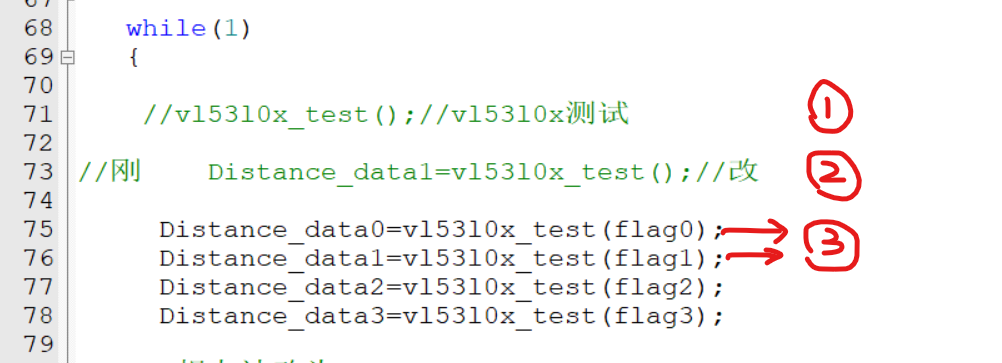
如圖六,很容易猜到,flag0代表了第一個激光模塊,由于函式vl53l0x_test()輸入的引數是flag0,所以相當于第一個激光模塊作業,這個模塊對應的IO口進行配置,類似,如輸入的是flag1,則第二個激光模塊作業,對應IO口配置,而和第一個激光模塊的IO口完全無關,類似于這樣:
圖七:
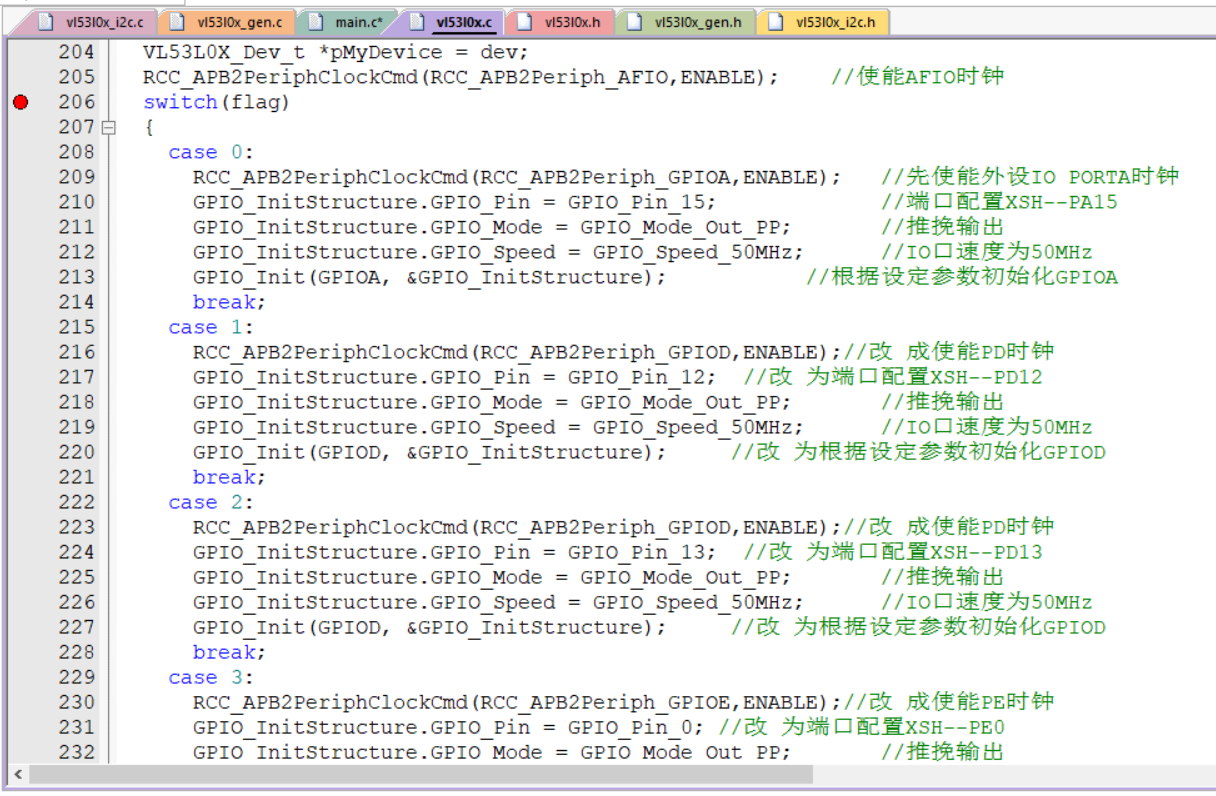
所以你需要合理的將main.c中的flag引入到你需要的地方
如果這一步遇到了困難,回去可以再翻翻C語言教材哦(我說的就是我……),里面那個static變數超級好用,或者你也可以用到!
是不是很通俗易懂?嘿嘿嘿
對了,很重要的一點注意啦:
雖然剛剛提過,但是小伙伴們可能沒有注意哦,如果你選擇了普通測量模式(vl53l0x_general_test),并且讓它能自動回圈作業了,那么其實你只用了圖三右邊三個.c檔案中的第三個(vl53l0x.gen.c),前兩個其實都沒用,所以你可以完全不必在意前兩個.c及其.h檔案中的埠配置,只需要修改第三個.c及.h檔案中的埠配置即可,當然,不管你選的是哪種測量模式,圖三左邊那個vl53l0x.c檔案和對應的.h檔案都還是需要改的……
所以,狠心點,如果你選了普通測量模式,直接把激光測距模塊INT口的那根線壓根別連了,
還有一個很重要的方法可以讓部分代碼不使用flag:
當你在加入flag的時候,你會發現有些在.h檔案中的宏定義好煩哦,它常常把某個埠名定義通過宏定義定義為另一個名字來提高代碼的可讀性,譬如:
圖八:
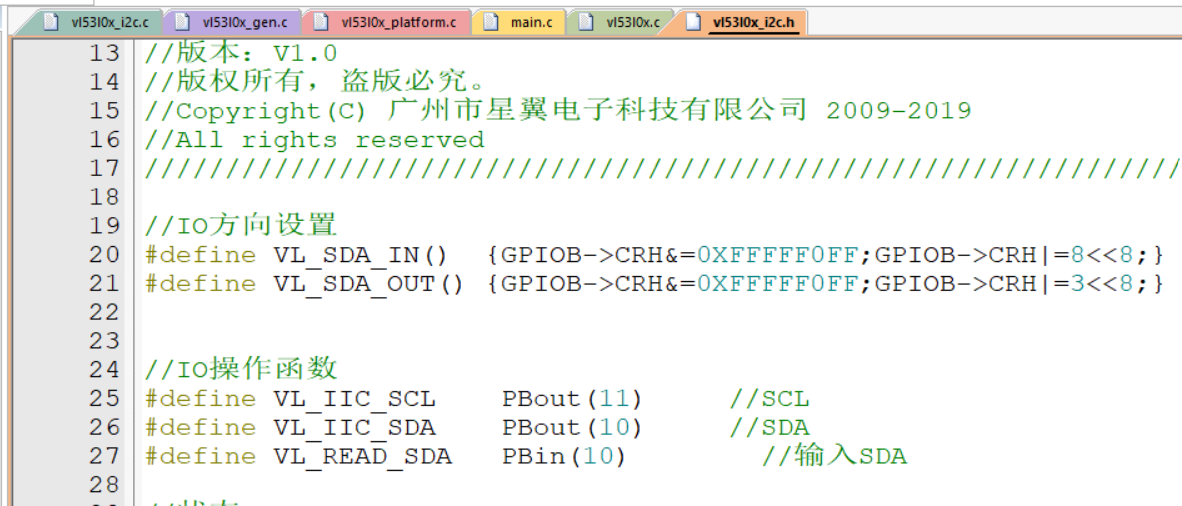 但是如何在宏定義中使用flag還是有點困難的,所以我突發奇想……不使用宏定義了,直接埠拿來用,要選擇也去.c檔案中選擇,所以我這樣干了:
但是如何在宏定義中使用flag還是有點困難的,所以我突發奇想……不使用宏定義了,直接埠拿來用,要選擇也去.c檔案中選擇,所以我這樣干了:
1.首先查找這些宏定義都用在哪里,是在干甚么用:
Ctrl+F,彈出用于 查找Find、替換Replace 的對話框,然后你可以查查他們用在哪,怎么用,拿筆記一下,并找找規律,然后才能想出對應的方法,
2.通過尋找共性來方便修改
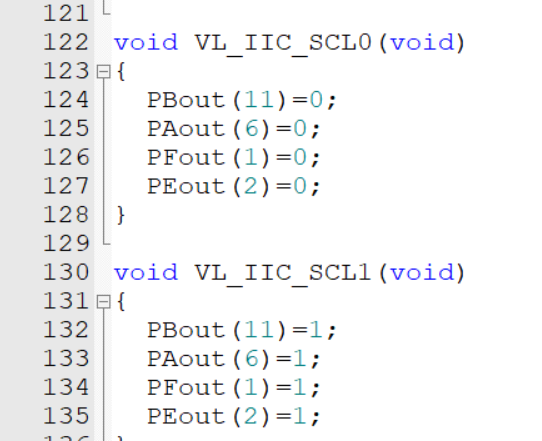
譬如圖八中的VL_IIC_SCL來代替的PBout(11),查找后你會發現,它只用來賦值0或1,即讓這個埠顯示高電平或低電平,所以如果這里你覺得用flag有點麻煩,不如VL_IIC_SCL做函式名,里面讓所有你要用到的埠都高電平或低電平……如圖九:
圖九:
3.把.h檔案中不需要的地方注釋掉,別忘了
至此,你應該 完全 知道了如何實作兩個激光模塊分時作業的方法,并且在你自己的不斷努力和反復修改、除錯之后,實作了讓兩個激光模塊分時自動回圈作業,并且能把兩個距離值都正確回傳到主函式并可以被呼叫,類似于圖六,
6.增加選擇陳述句內容,讓四個激光模塊分時自動回圈作業:
恭喜恭喜,你已經完成了95per的內容,在有了成功撰寫兩個激光模塊的基礎之后,你只要再半個小時,就可以把其他兩個模塊裝上去啦!
即:
1.分配引腳
這是我的,大家當然可以都不一樣,但自己配置時推薦使用獨立IO口:
模塊一:SCL—PB11 ;SDA—PB10 ;XSH—PA15
模塊二:SCL—PA6 ;SDA—PA5 ;XSH—PD12
模塊三:SCL—PF1 ;SDA—PF0 ;XSH—PD13
模塊四:SCL—PE2 ;SDA—PE1 ;XSH—PE0
每個模塊都需要各自連VCC(5V或3.3V都可),GND,INT如果你選的是普通測量,可以不連,
2.代碼增加選擇內容
說白了就是像case陳述句后面多兩選擇內容等一些重復操作
這部分內容相信你可以自己做出來的,如果做不出來,那再回過去仔細看看步驟五(讓兩個激光模塊作業的方法)
7.我的代碼和板子作業視頻
我好像還不會把視頻、檔案啥的直接上傳……抱拳 抱拳
大家如果需要,只能給大家提供百度網盤啦
網盤鏈接:
鏈接:https://pan.baidu.com/s/1cy-7hMbe-qO4nLNvhwwhWQ
提取碼:GHQQ
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/259014.html
標籤:其他