總結一學期ROS下使用激光雷達進行機器人導航定位的學習識訓,這是本人的第一篇博客,如有錯誤地方,請指出,由于之前有些圖片是手機拍攝的,并未截圖,帶來不便請諒解,
參考博客:
1.Turtlebot + Rplidar A2使用Gmapping建圖與導航:
https://www.jianshu.com/p/4277243c786d
2. Ros—RPLIDAR A2激光雷達安裝(hector_mapping演算法建圖同cartographer_ros建圖對比)
https://blog.csdn.net/qq_40503771/article/details/87906730?utm_medium=distribute.pc_relevant.none-task-blog-title-1&spm=1001.2101.3001.4242
3. Rplidar A1/A2使用及Hector_SLAM建圖
https://blog.csdn.net/NouriXiiX/article/details/102690064
4. Turtlebot + Rplidar A2使用Gmapping建圖與導航(參考定位和導航部分)
https://blog.csdn.net/dbdxnuliba/article/details/89322205
5. 寫python腳本訂閱/amcl_pose坐標:
https://blog.csdn.net/groot_lee/article/details/79273097
環境
1、Rplidar A2 激光雷達;
2、工控機;
3、Ubuntu 16.04;
4、Turtlebot,
1.在電腦上安裝Turtlebot 底盤驅動
1.1 安裝 Turtlebot 底盤驅動
$ sudo apt-get update
$ sudo apt-get install ros-kinetic-turtlebot
1.2 安裝 Turbot
新建名為 catkin_hector 的作業空間,
$ cd ~/catkin_hector/src
$ git clone https://github.com/ncnynl/turbot
$ cd ..
$ catkin_make
1.3 安裝 turtlebot_apps
$ cd ~/catkin_hector/src
$ git clone https://github.com/ncnynl/turtlebot_apps
$ cd ..
$ catkin_make
1.4 測驗底盤
安裝完 Turtlebot 底盤驅動后,測驗電腦是否可以驅動底盤,
1.4.1 檢查埠:
檢查是否有 kobuki 埠,打開一個終端:
$ ls /dev/kobuki
1.4.2 底盤啟動測驗:
啟動底盤
$ roslaunch turbot_bringup minimal.launch
執行命令后,會聽到一串開機音樂
新終端,執行命令
$ rosrun turbot_tools test_move
成功執行命令后,小車向前緩慢移動,按 Ctrl + C 即可中止,
2. 安裝雷達驅動程式
2.1 安裝雷達驅動
$ cd ~/catkin_hector/src
$ git clone https://github.com/robopeak/rplidar_ros.git
$ cd ..
$ catkin_make
2.2 設定 USB 口的權限
$ sudo gedit /etc/udev/rules.d/70-ttyusb.rules
在打開的界面中,輸入
KERNEL=="ttyUSB[0-9]*", MODE="0666"
運行如下程式,查看權限,有兩個 rw 就可以了
ls -l /dev |grep ttyUSB*
2.3 雷達啟動測驗
$ roslaunch rplidar_ros rplidar.launch
運行成功后如下,雷達開始旋轉,
如果報錯:
Error,cannot bind to the specicified serial port /dev/ttyUSB0,
是因為埠權限不夠,給埠加權限:
$ sudo chmod +x /dev/ttyUSB0
$ sudo chmod 777 /dev/ttyUSB0
2.4 測驗掃描界面
$ roslaunch rplidar_ros view_rplidar.launch
情況正常的情況下可以看見激光資料,
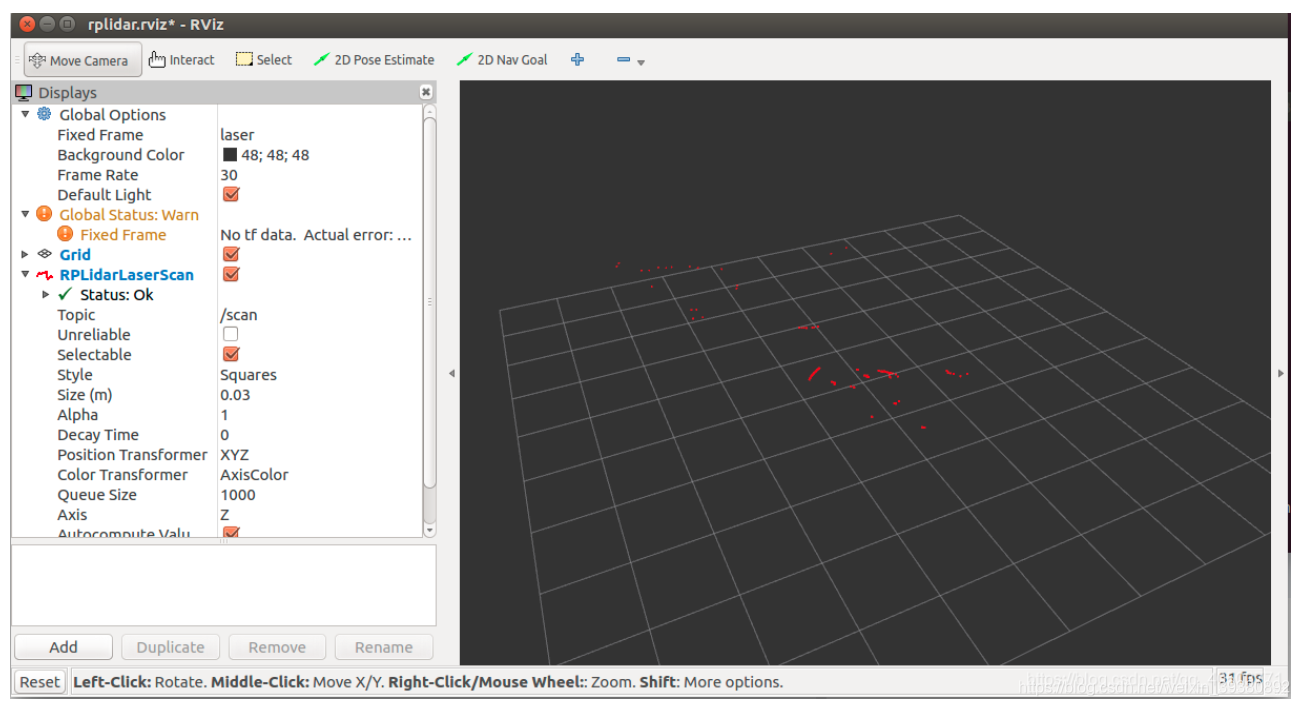
成功出現 rviz 中激光畫面之后, 按 Ctrl+c 結束操作,
3.使用 hector_slam演算法建圖測驗
3.1 安裝 hector_slam 包
$ cd ~/catkin_hector/src
$ git clone https://github.com/tu-darmstadt-ros-pkg/hector_slam.git
$ cd …
$ catkin_make
3.2 進入 launch 檔案夾下,在檔案夾下添加hector_mapping_demo.launch 檔案:
$ cd src/rplidar_ros/launch/
$ touch hector_mapping_demo.launch
$ gedit hector_mapping_demo.launch
hector_mapping_demo.launch:
<launch>
<node pkg="hector_mapping" type="hector_mapping" name="hector_mapping"
output="screen">
<!-- Frame names -->
<param name="pub_map_odom_transform" value="true"/>
<param name="map_frame" value="map" />
<param name="base_frame" value="base_link" />
<param name="odom_frame" value="base_link" />
<!-- Tf use -->
<param name="use_tf_scan_transformation" value="true"/>
<param name="use_tf_pose_start_estimate" value="false"/>
<!-- Map size / start point -->
<param name="map_resolution" value="0.05"/>
<param name="map_size" value="2048"/><param name="map_start_x" value="0.5"/>
<param name="map_start_y" value="0.5" />
<param name="laser_z_min_value" value = "-1.0" />
<param name="laser_z_max_value" value = "1.0" />
<param name="map_multi_res_levels" value="2" />
<param name="map_pub_period" value="2" />
<param name="laser_min_dist" value="0.4" />
<param name="laser_max_dist" value="5.5" />
<param name="output_timing" value="false" />
<param name="pub_map_scanmatch_transform" value="true" />
<!--<param name="tf_map_scanmatch_transform_frame_name"
value="scanmatcher_frame" />-->
<!-- Map update parameters -->
<param name="update_factor_free" value="0.4"/>
<param name="update_factor_occupied" value="0.7" />
<param name="map_update_distance_thresh" value="0.2"/>
<param name="map_update_angle_thresh" value="0.06" />
<!-- Advertising config -->
<param name="advertise_map_service" value="true"/>
<param name="scan_subscriber_queue_size" value="5"/>
<param name="scan_topic" value="scan"/>
</node>
<node pkg="tf" type="static_transform_publisher" name="base_to_laser_broadcaster"
args="0 0 0 0 0 0 /base_link /laser 100"/>
<node pkg="rviz" type="rviz" name="rviz"args="-d $(find hector_slam_launch)/rviz_cfg/mapping_demo.rviz"/>
</launch>
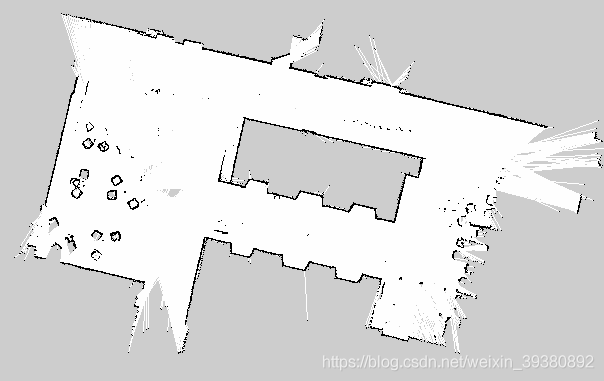
3.3 建圖
重新啟動激光雷達:
$ roslaunch rplidar_ros rplidar.launch
再打開一個新的terminal,輸入命令以測驗Hector建圖:
$ roslaunch rplidar_ros hector_mapping_demo.launch
成功觀察到所建的圖,
啟動鍵盤控制機器人移動:
$ roslaunch turbot_teleop keyboard.launch
3.4 保存地圖
安裝map-server包
$ sudo apt-get install ros-kinetic-map-server
保存地圖
$ rosrun map_server map_saver -f ~/my_map
4. 使用AMCL和move_base實作定位和導航
4.1 導航定位
先啟動底盤:
$ roslaunch turbot_bringup minimal.launch
啟動AMCL,指定地圖:
$ roslaunch turbot_slam laser_amcl_demo.launch map_file:=/home/turtlebot/my_map.yaml
(navigation中laser中driver中rplidar_laser.launch中我修改了/dev/rplidar為/dev/ttyUSB0)
給埠權限
$ sudo chmod +x /dev/ttyUSB0
$ sudo chmod 777 /dev/ttyUSB0
再打開rviz:
$ roslaunch turbot_rviz nav.launch
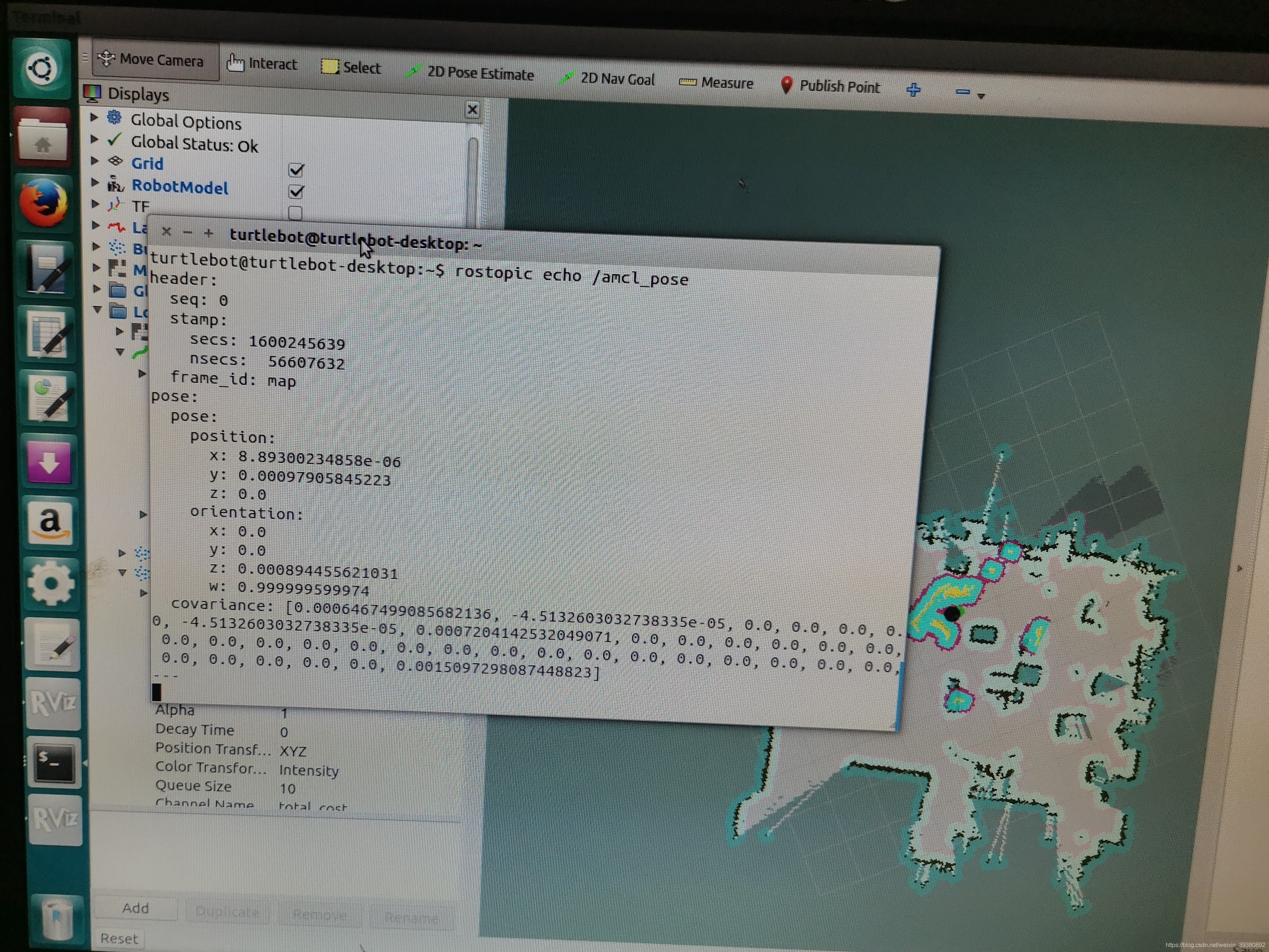
4.2 獲取機器人位置資訊
查看話題
$ rostopic list
使用如下指令查看到位置
$ rostopic echo /amcl_pose
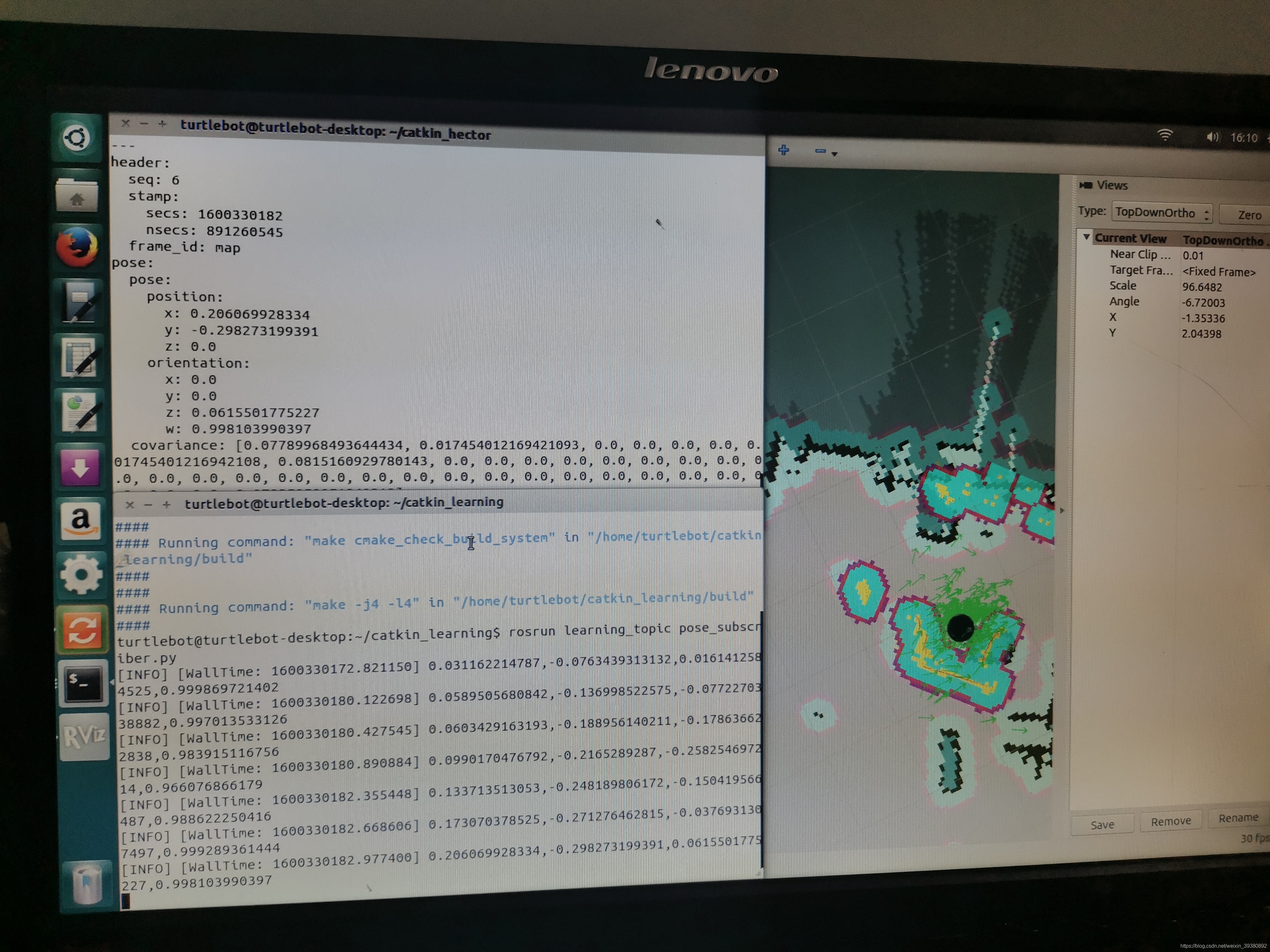
4.3 訂閱機器人位姿,python實作
amcl_pose的資料型別:
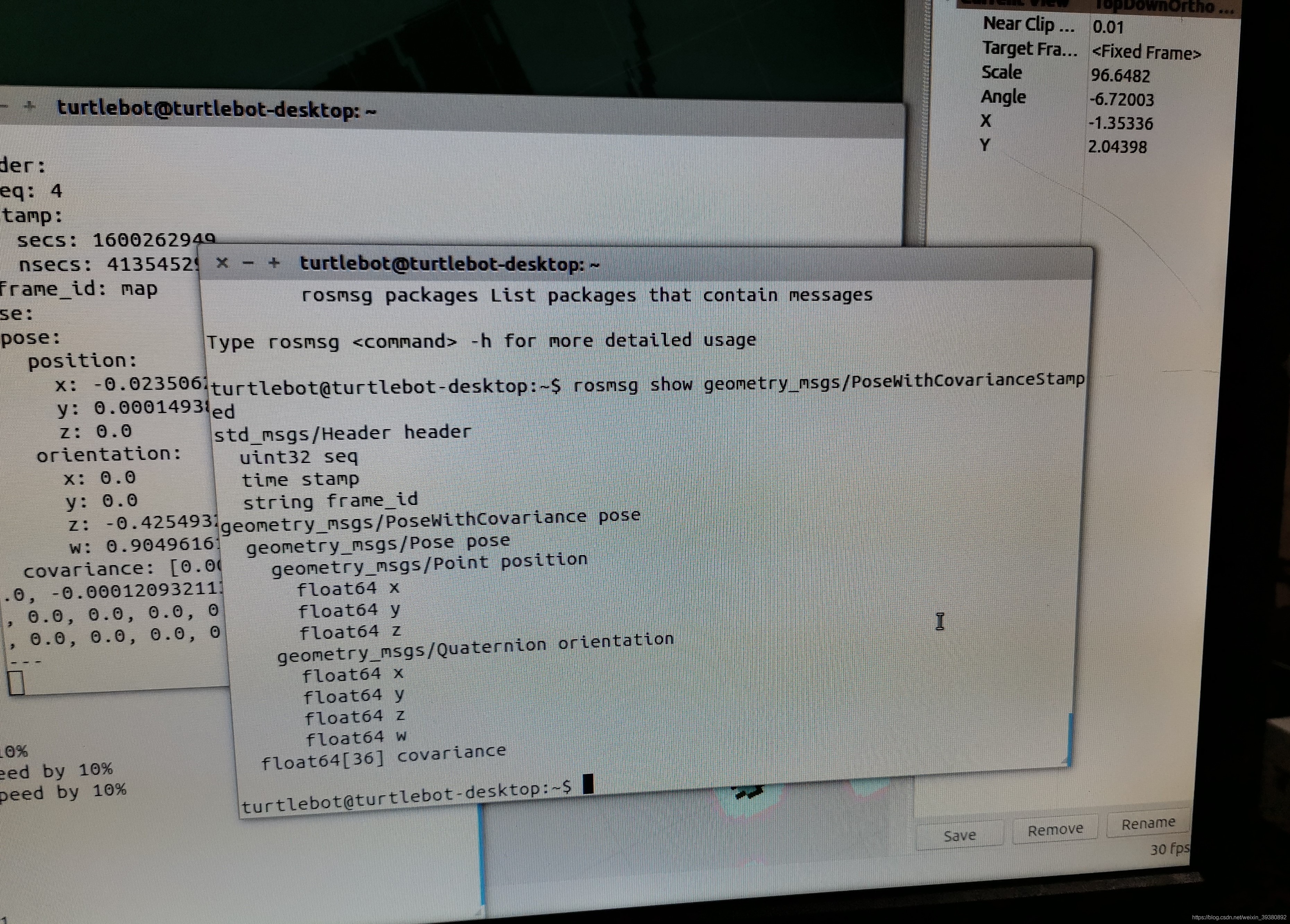
新建作業空間,新建learning_topic包,新建scripts檔案夾,新建pose_subscriber.py,訂閱/amcl_pose:
#! /usr/bin/env python
#coding=utf-8
import rospy
from geometry_msgs.msg import PoseWithCovarianceStamped,PoseStamped
def PoseCallBack(msg):
data=""
#訂閱到的坐標資訊
x = msg.pose.pose.position.x
y = msg.pose.pose.position.y
#訂閱到的四元數的資訊,用來表示朝向
orien_z = msg.pose.pose.orientation.z
orien_w = msg.pose.pose.orientation.w
data = str(x) + "," + str(y)+ "," + str(orien_z)+ "," + str(orien_w)
rospy.loginfo(data)
def PoseSub():
rospy.init_node('pose_sub',anonymous=False)
#監控話題,并在回呼函式中處理
rospy.Subscriber('/amcl_pose',PoseWithCovarianceStamped,PoseCallBack)
rospy.spin()
if __name__=='__main__':
try:
PoseSub()
except:
rospy.loginfo("出錯,退出中...")
編譯及運行:
$ cd catkin_learning
$ catkin_make
$ rosrun learning_topic pose_subscriber
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/259968.html
標籤:AI