手擼六足機器人(三)----------確定控制方式“搖桿模塊+LCD螢屏顯示+藍牙通訊”及原始碼示例[STM32實作]
關于這一塊,本來是想用0.96寸的OLED實作的(小巧便宜),可惜快遞停運,手頭只有LCD,頭一次寫LCD控制,寫了挺久,遇到了很多問題,不說這個,
LCD顏色比較多,為了對得起這個,我覺得做一個八向控制比較合適,
搖桿模塊
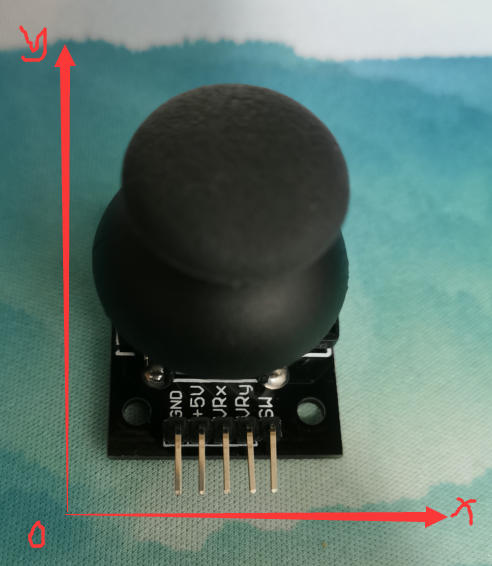
GND:接地
+5V:這個為了輸出正常,接3.3V好
URx:輸出x電壓,為0~3.3V
URy:輸出y電壓,為0~3.3V
SW:按鍵,按下輸出低電平
需要使用ADC采樣,多通道掃描+DMA就行
藍牙模塊
上篇已經說過了,不再贅述
LCD螢屏顯示
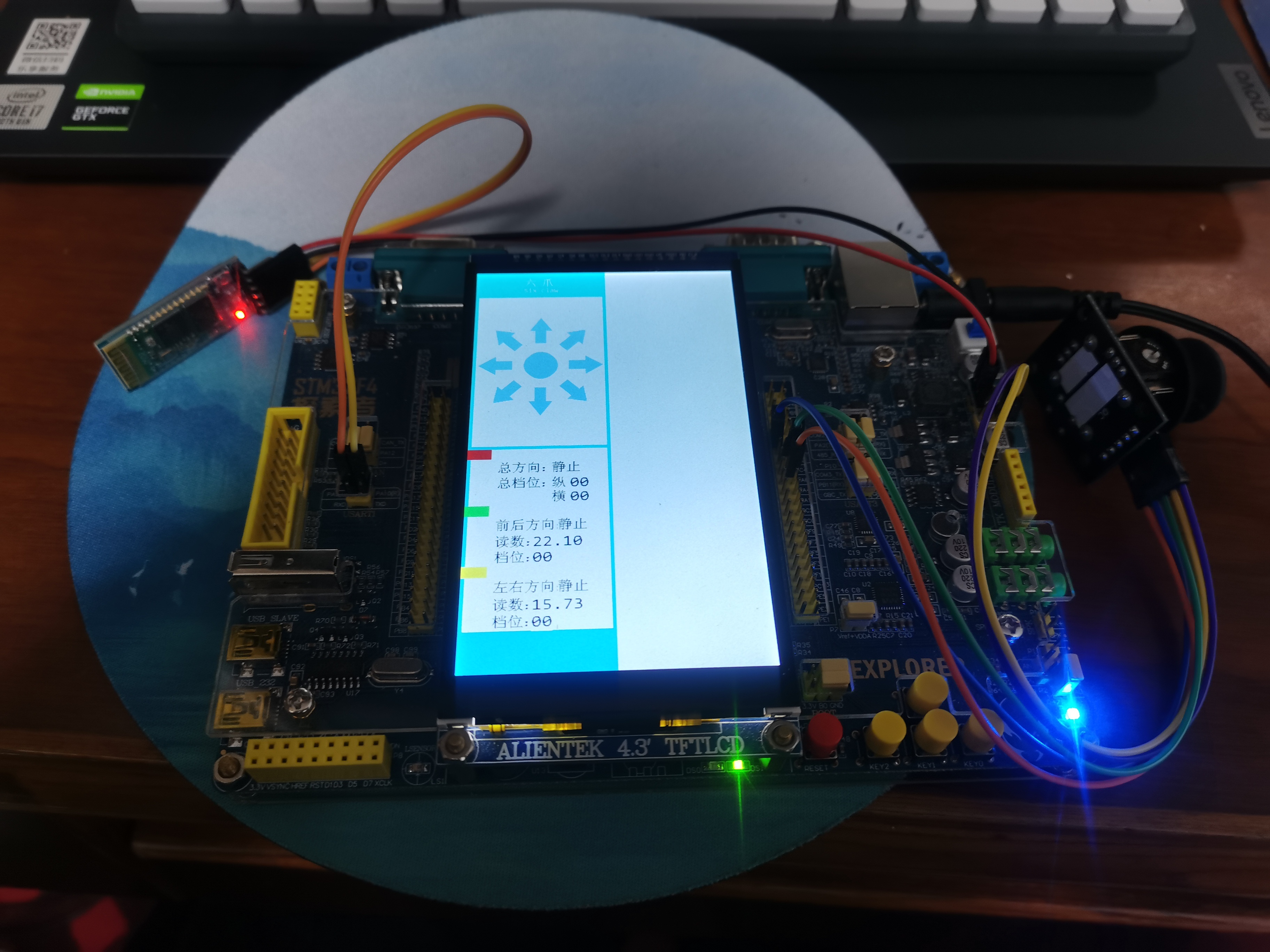
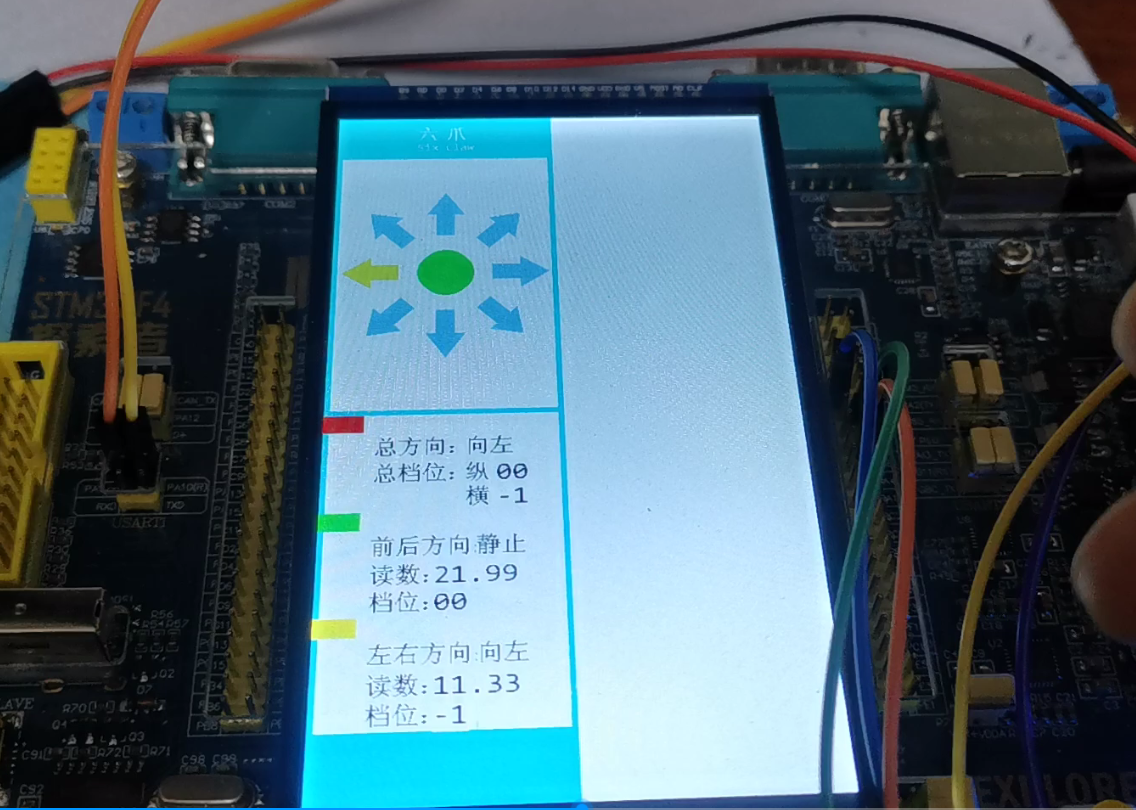
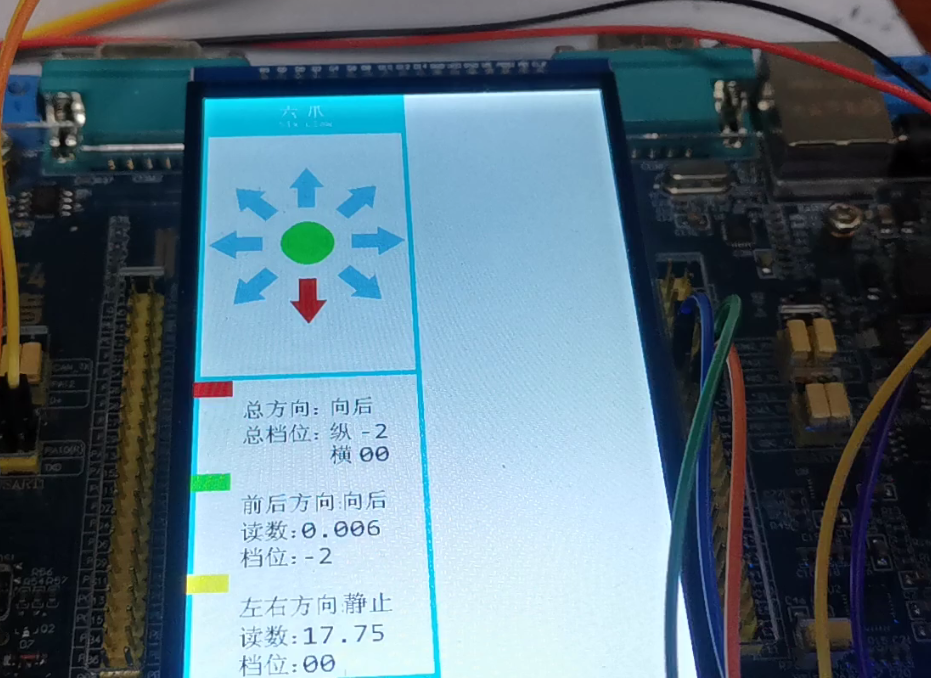
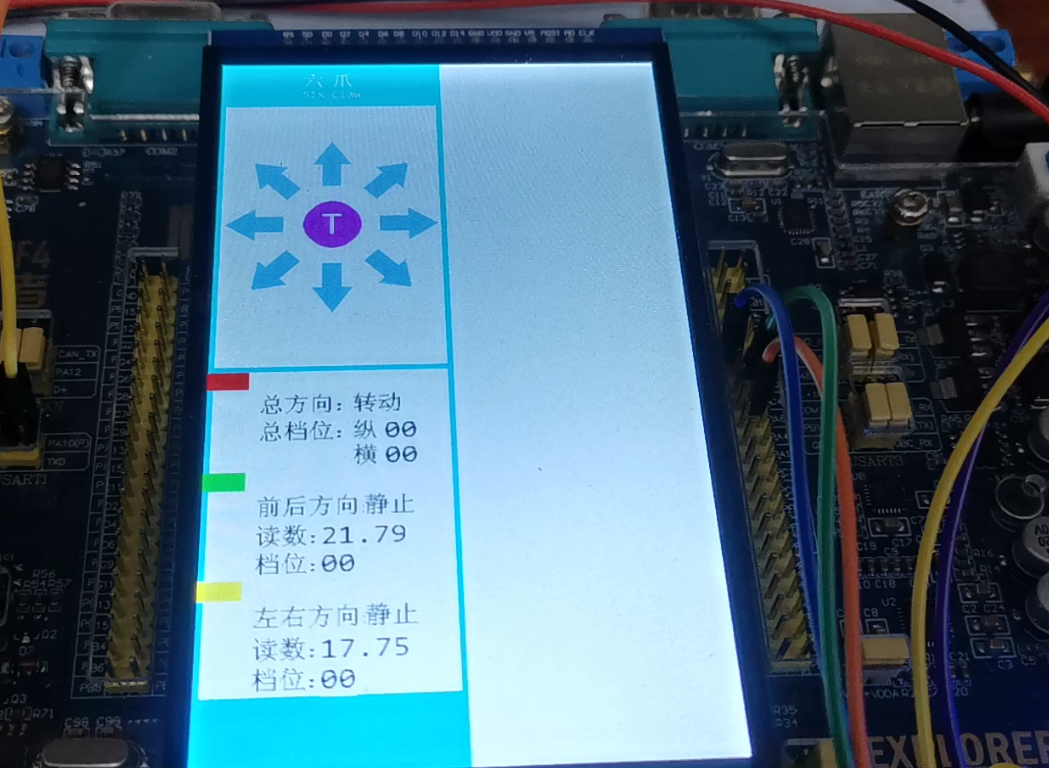
左邊為什么要空著?因為機器人可以加很多東西上去,留著以后用,
每個方向支持兩種速度,黃色和紅色,
中心的紫色表示SW被按下,開始原地打轉,
螢屏是4.3寸的,NT35510的,
才疏學淺,只能提供一個F407的原始碼,有需要的留下郵箱,我會定時看看的,歡迎大家一起交流!
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/261034.html
標籤:其他
上一篇:光電信標燈發光碟的特性電流測驗