將聯邦濾波器整理如下,但因為可參考的材料太少,所以也并不一定完全正確,僅供參考,
目錄:
- 聯邦濾波器
- 關鍵技術
- 一般結構
- 作業流程
- 四種結構
- 幾種結構的比較
- 最優性證明
1 聯邦濾波器
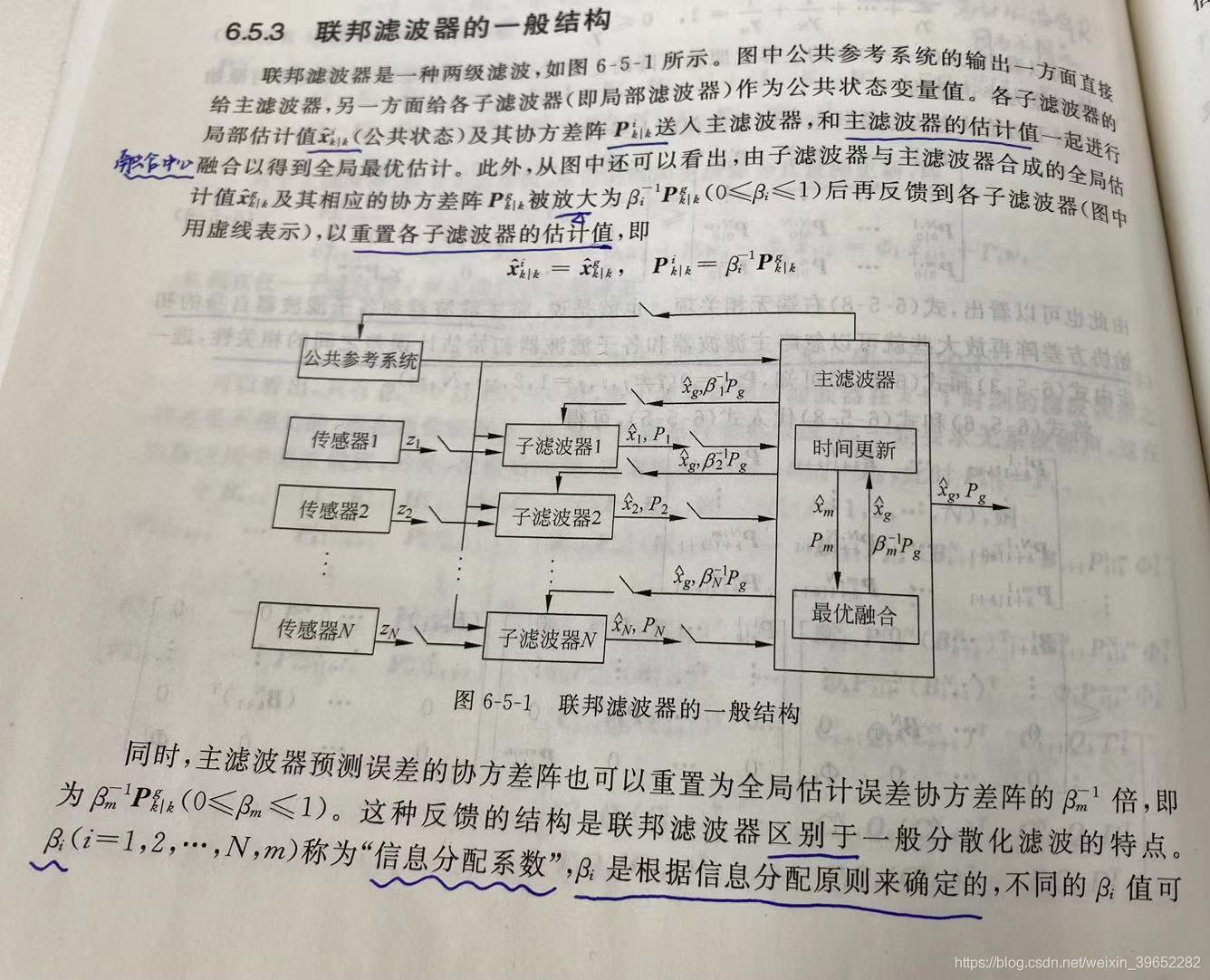
聯邦濾波器:是一種兩級濾波器,由1個主濾波器和n個子濾波器組成,子濾波器之間是平行結構,
主濾波器功能:時間更新;(n+1)個濾波器的結果融合;
子濾波器功能:獨立的進行時間更新和量測更新(可以選擇不同的濾波演算法);
2 關鍵技術
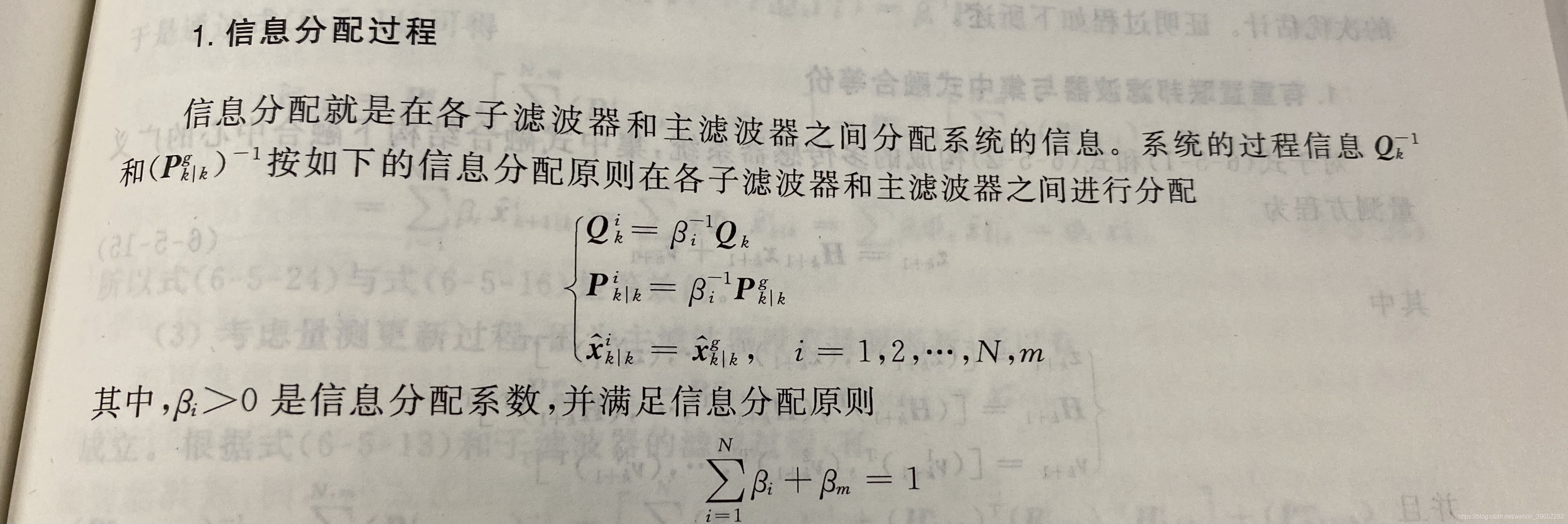
聯邦濾波器的關鍵技術:方差上界消除相關;統一的資訊分配原則;
方差上界消除技術:
首先假設子濾波器和主濾波器的狀態轉移矩陣、程序噪聲分布陣、程序噪聲相同,由于程序噪聲協方差Q和初始估計協方差P非0,主濾波器和各子濾波器之間的估計誤差協方差Pk+1|k+1非0(相關性),但是將主濾波器和子濾波器自身的噪聲協方差矩陣和初始估計協方差矩陣放大就可以忽略主濾波器和各子濾波器的估計誤差之間的相關性,那么有 Pk+1|k+1=0(這里需要放大的是Qk和Pk),具體可參考《多源資訊融合》,P289
應用:每次進入融合中心后,完成一次最優狀態估計,然后會將主濾波器和子濾波器重置,這樣會導致再次產生相關性,因此每次重置時,都通過放大協方差矩陣去除這種相關性,即每個Qk和Pk都是下一次處理的初始誤差,
Q:書中內容的前提是無重置,然后也會有相關性,因此無論重置與否,都會產生相關性?但是無重置時,意味著Pk|k和最優狀態估計值xk是不會重置給各個子濾波器的,那么如何通過放大協方差消除相關性的影響呢?
3 一般結構
4 作業流程
-
資訊分配
-
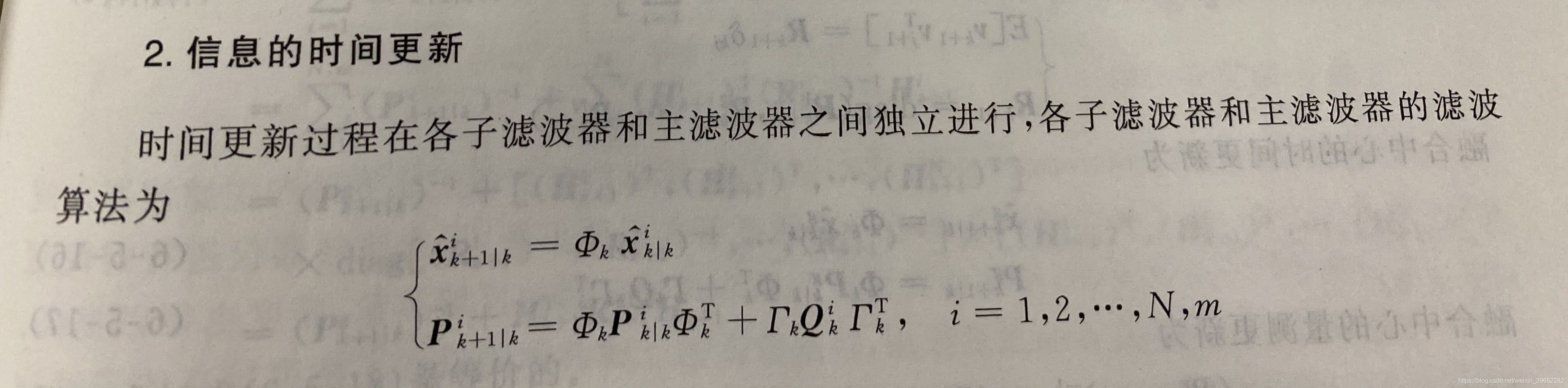
時間更新(子濾波器和主濾波器)
-
量測更新(子濾波器)
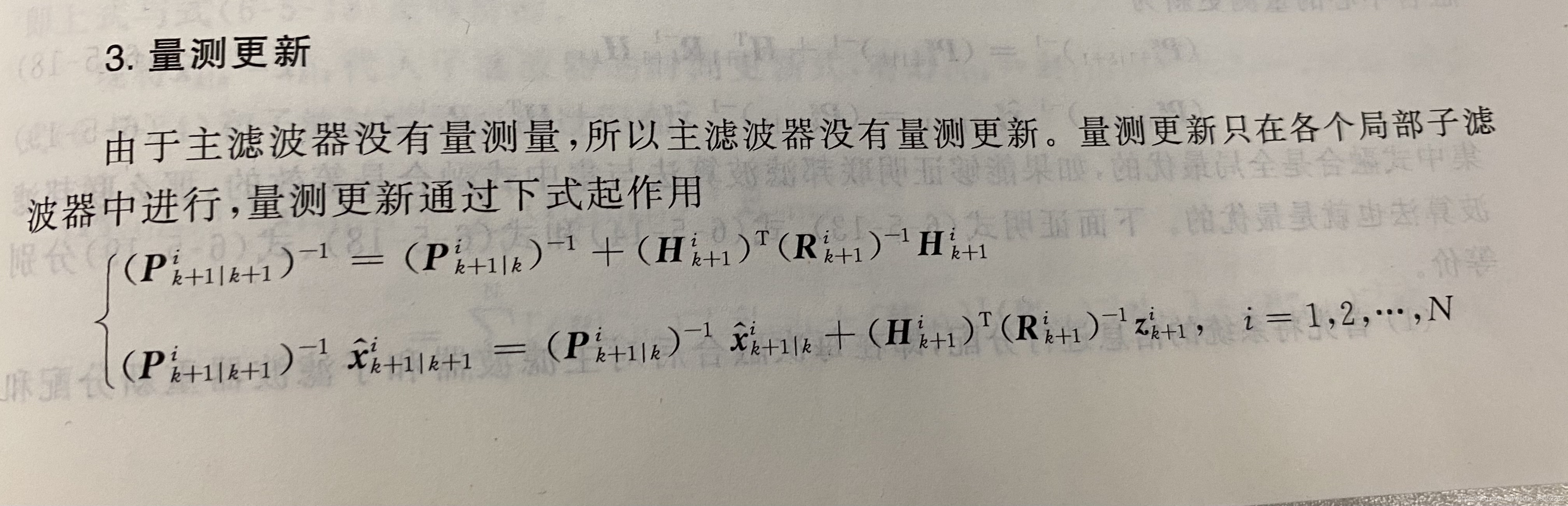
Q: 子濾波器的量測更新好像不是采用的卡爾曼的量測更新公式,但是對于子濾波器來說,時間更新和量測更新的方法應該是不唯一的,可以根據自己的需求選擇不同的方法,只要最后得到的是資訊融合所需的輸入即可,
-
資訊融合
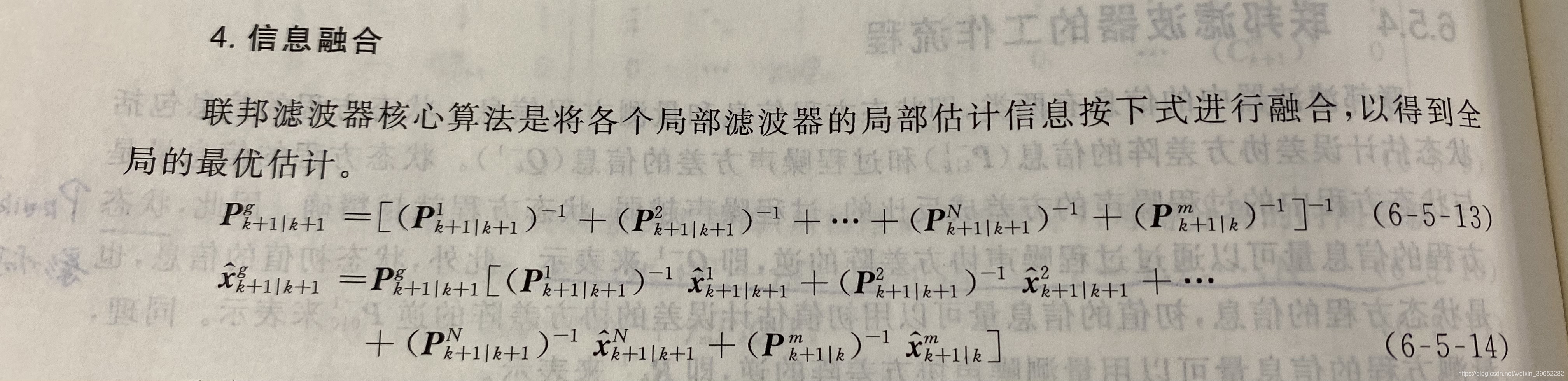
5 四種結構
-
融合-重置式 FR
資訊在各子濾波器和主濾波器間按一定比例分配,
特點:
(1)全域及區域精度提高;
(2)子濾波器必須等到融合結果反饋過來才進行下一步的濾波;
(3)一個傳感器的故障未被被隔離前,可能會通過重置污染其他子濾波器和主濾波器,使得系統容錯能力下降;
(4)隔離故障傳感器后,區域濾波器要重新初始化,需要經過一段時間資料才能使用,導致故障恢復能力下降,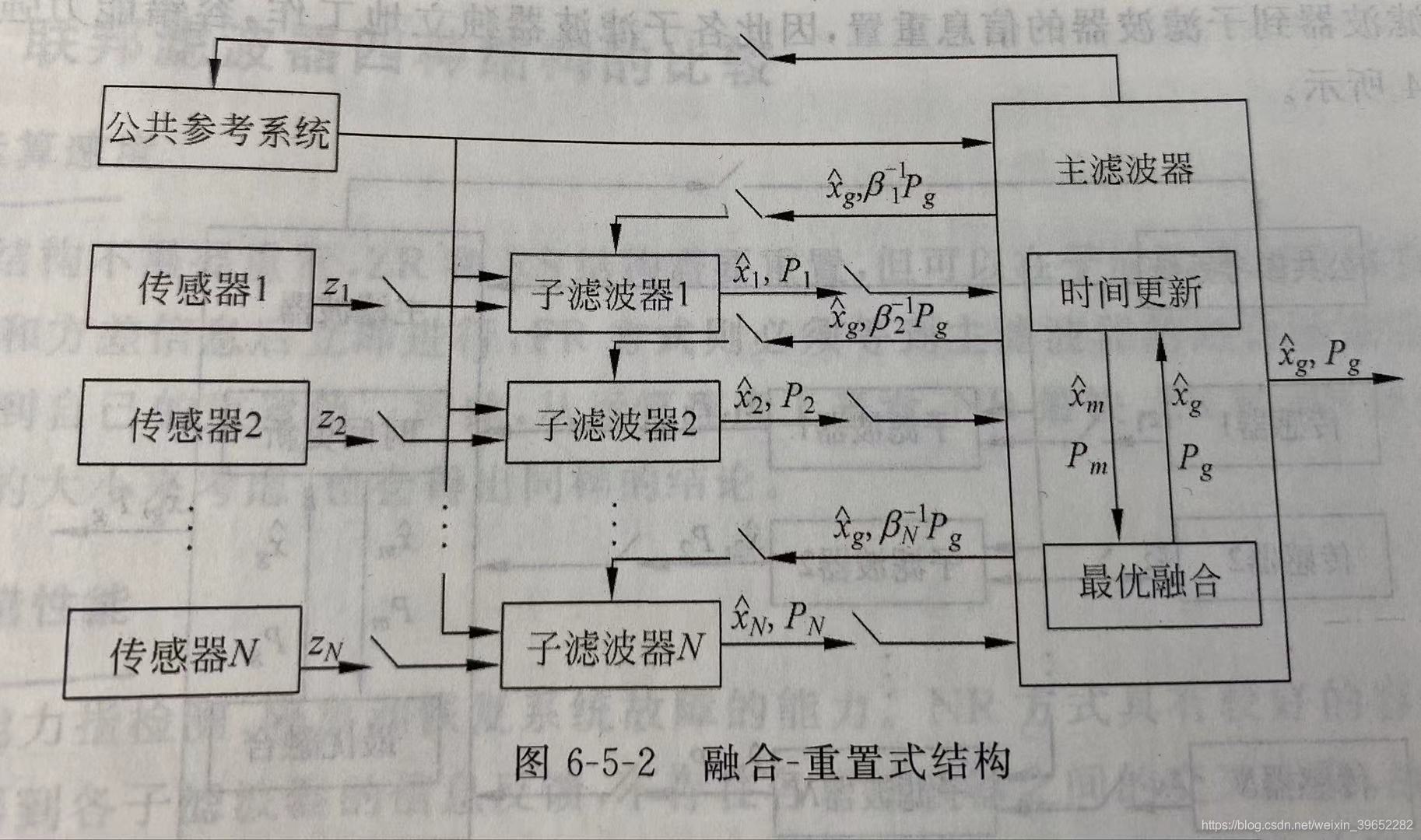
Q: 是否存在關系: Bi=Bm=1/(1+N);
-
零重置結構 ZR
主濾波器得到系統的全部資訊,Bi=0,Bm=1;由于1/Bi(資訊分配系數)趨向于無窮,因此子濾波器的程序噪聲協方差矩陣和預測估計誤差協方差矩陣均趨向于無窮,故子濾波器不再進行卡爾曼濾波,即不再獲取估計值及最優狀態估計值,而是將量測值進行最小二乘演算法平滑后直接輸入主濾波器,
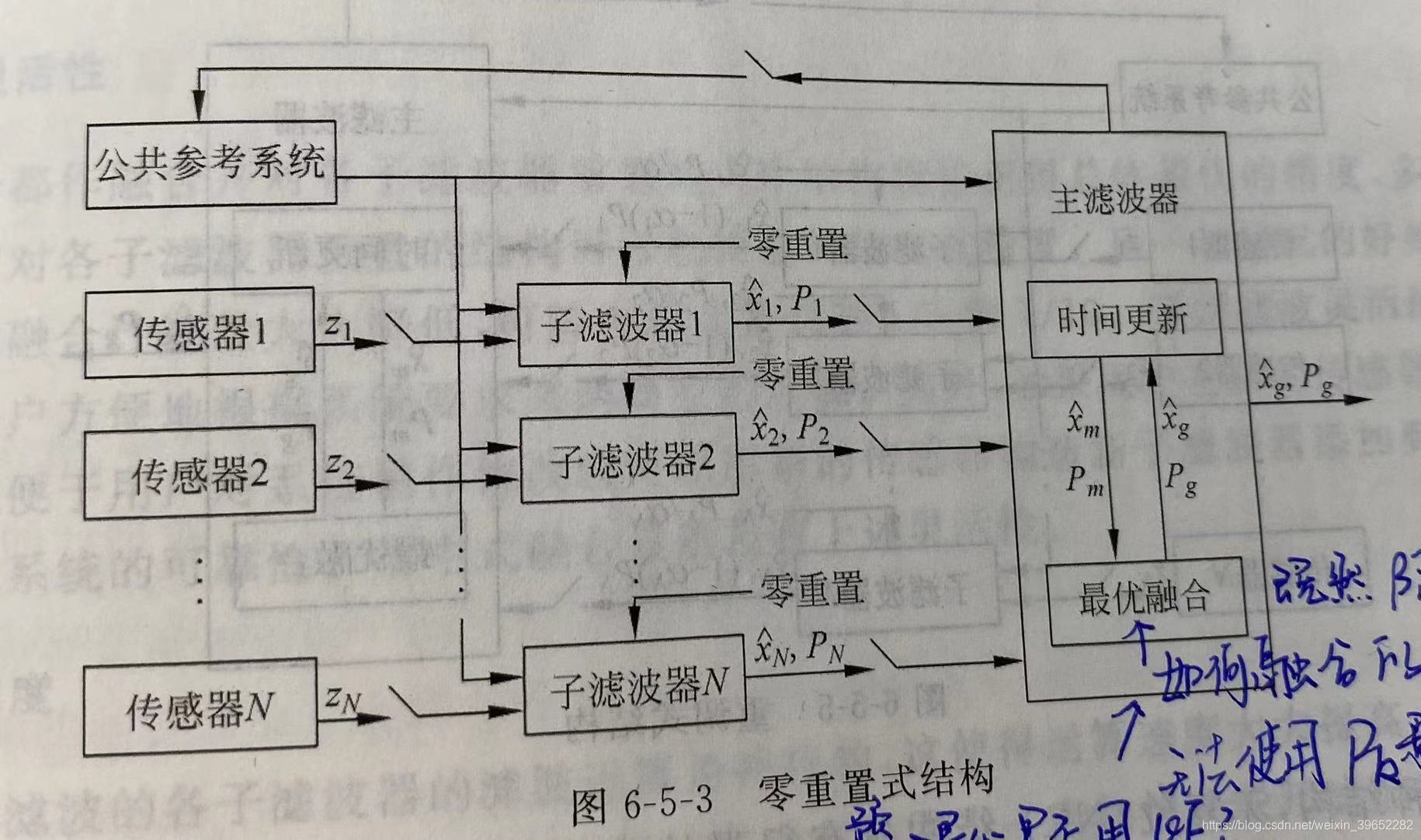
Q: 這里的子濾波器的最優狀態估計誤差協方差矩陣P是怎么來的呢?
-
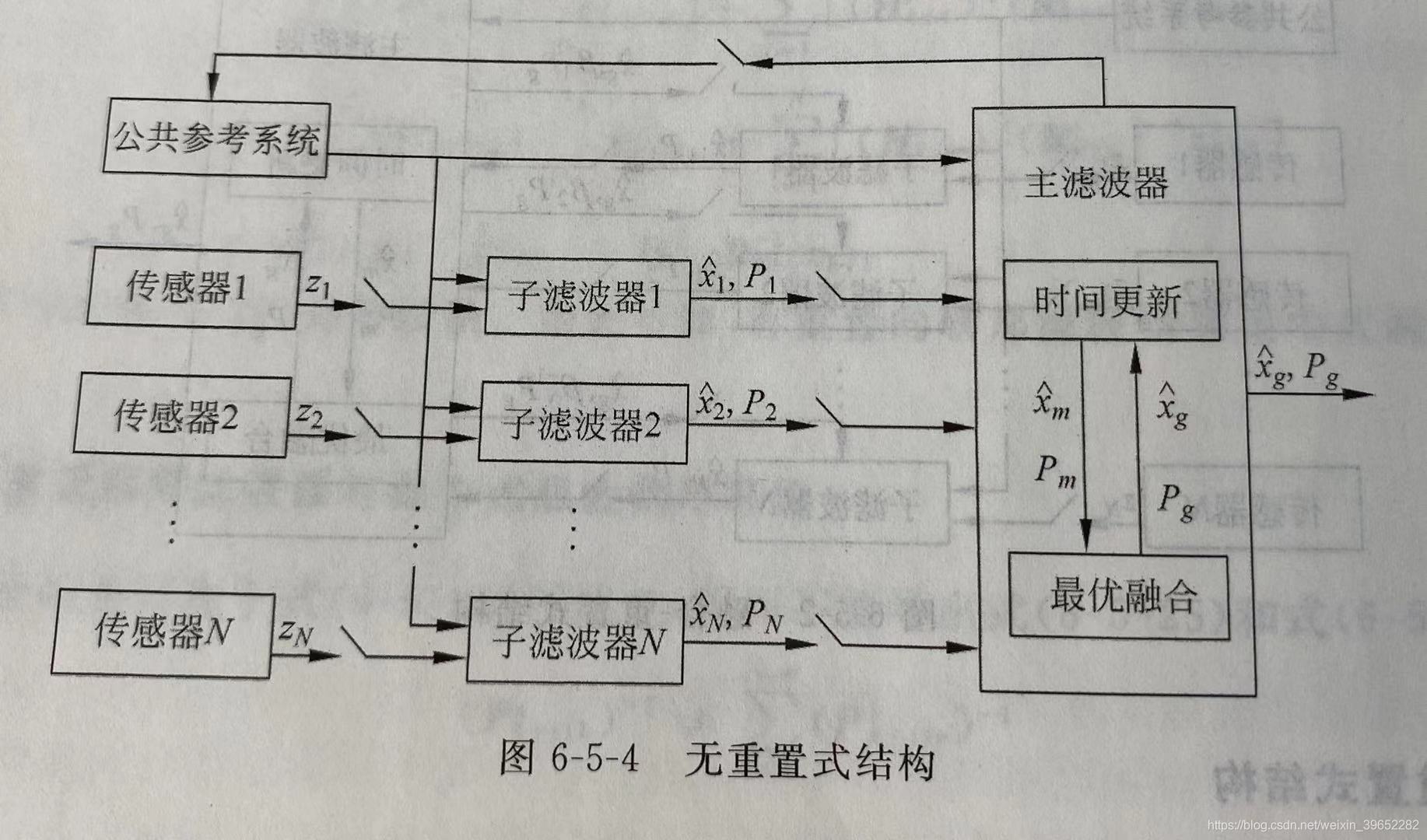
無重置結構 NR
在初始時刻,各子濾波器根據所對應傳感器的精度高低按照一定的比例分配系統的資訊,主濾波器無資訊分配,其輸出僅由時間更新確定,此結構中,主濾波器僅將子濾波器的輸出融合而不保留這些資訊(即不會重置給子濾波器),并且結構中沒有主濾波器到子濾波器的資訊重置,各子濾波器獨立作業,容錯能力強,
特點:
(1)容錯性和可靠性提升了;
(2)無重置使得估計精度稍有下降;
Q:
初始時刻如何分配資訊?這里是不是說,按照傳感器的精度資訊自行設定初始P和Q,然后自己不斷地迭代更新,相當于每個子濾波器都相互獨立,
主濾波器無分配的資訊,那么他的P是如何更新的呢,是不是使用自己設定的初始P和Q,不斷的迭代更新,而且他每次的x、P都是主濾波的最優狀態估計值和最優狀態估計誤差協方差矩陣么還是自己k-1時刻的預測值呢?
如果是上邊考慮的那樣,那么為什么說主濾波器不分配資訊呢, -
重調式結構 RS
各子濾波器僅將一部分(1-a,0<a<1為保留系數)資訊送入主濾波器,然后子濾波器根據保留系數重新調整其協方差為1/a倍(這是不是就是所謂的重置),主濾波器以融合結果作為初值,該結構允許不同子濾波器的資訊在不同時刻過來融合,
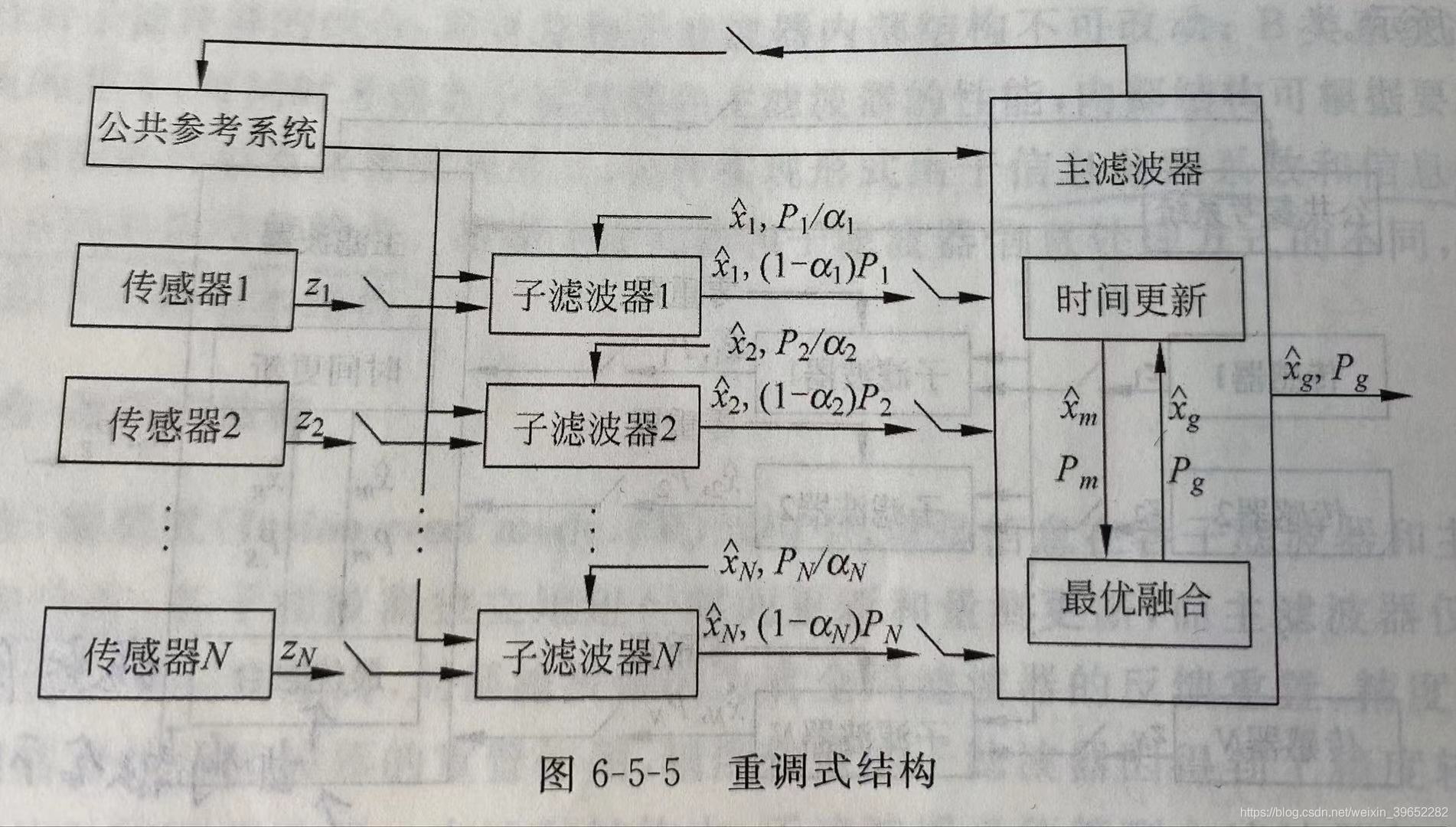
Q: 系數a如何確定呢?
6 幾種結構的比較
(1)運算速度/運算量
需重置:FR、ZR、RS
ZR、RS需要重置,但可在子濾波器向主濾波器發送完最優狀態估計值和最優狀態估計誤差協方差矩陣后立即開始,而FR必須等主濾波融合結束后將最終結果反饋回子濾波器才可以重置,
不需重置:NR
NR相當于獨立的子濾波器、主濾波器各自作業、互不影響(像每個人都干自己的作業,最后根據一個規則結合到一起);
FR的重置是由主濾波器的融合結果最優狀態估計x和最優狀態估計誤差協方差P決定的;
ZR和SR只跟自己的最優狀態估計x和最優狀態誤差協方差矩陣P有關,只不過是系數發生了變化,
(2)容錯性能
容錯性能指檢測、隔離和恢復系統故障的能力,NR因為無資訊反饋,不存在各子濾波器之間的交叉污染,故障被隔離在一個子濾波器內,便于系統的故障隔離,且主濾波還可以使用其他子濾波器的估計值繼續合成融合結果,
總的來說, NR在運算速度和容錯性方面較好,缺點是精度稍低,且需要各子濾波器在同一時刻將自己的估計結果輸入主濾波器;ZR和RS允許子濾波器的估計值在不同時刻送入主濾波器,但是容錯性能較差;FR由較好的精度,但容錯性和運算速度較差,
Q: 為什么NR需要子濾波器將估計值一起輸入主濾波器呢,誰來了誰和主濾波器一起融合就好了啊,又不需要反饋資訊,只是主濾波器時間更新的次數多一些而已,
7 最優性證明
有重置聯邦濾波器與集中式融合等價,無重置聯邦濾波器與集中式融合不等價,是最小方差意義下的次優估計,
終于寫完了這部分的理論內容,但是仍然存在很多疑問,并且網上資料又少,如果有了解的伙伴可以一起討論,完結撒花~
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/261092.html
標籤:其他