對于紅外接收的通信原理有很多,常用的有通過脈寬調制(PWM)和脈時調制(PPM)兩種方法,最近小編就在嘗試寫基于51單片機的脈時調制的紅外接收程式,有一些心得,與大家分享分享,
原理分析
通常的紅外遙控器是將二進制脈沖碼調制在38KHz的載波上,經緩沖放大后送至紅外發光二極管,轉化為紅外信號發射出去,
因為二進制脈沖碼的形式有很多種,所以要開發紅外接收設備,一定要知道紅外遙控器的載碼方式和載波頻率,我們才可以選取一體化紅外接收頭和制定解碼方案,
下面是我使用的紅外接收頭的實物與原理圖

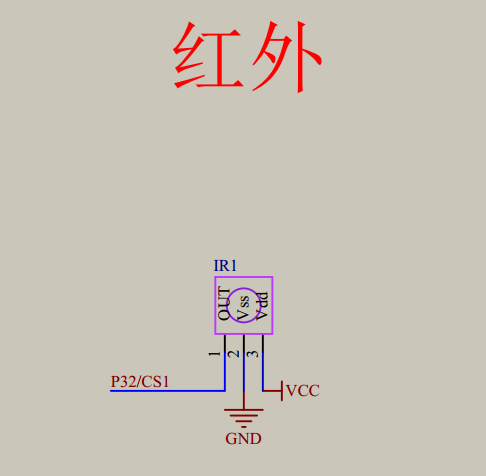
由原理圖可以看到,我使用的一體紅外接收頭有三個引腳,分別是VCC、GND和資料引腳(用來傳輸資料),
資料形式
現在我們已經知道了它是由一根資料引腳來傳輸資料,那資料又是怎么傳輸?傳輸一次的資料格式又是什么呢?

在這兒,可以很明顯的看到,資料是由五段資料組成,
首先它會給一個9ms的低電平,4.5ms的高電平組成的起始碼,告訴我們接下來要傳輸資料了,然后開始傳輸32位二進制的資料碼,
由于它只有一根資料引腳,所以我們要通過這一根資料引腳來判斷它傳輸的資料是二進制的 ‘ 0 ’ 還是 ‘ 1 ’ ,
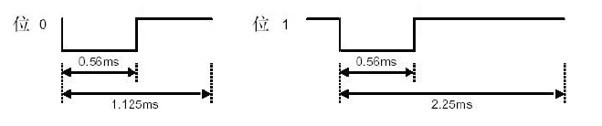
在這兒可以看到,無論資料傳輸 ‘ 0 ’ 還是 ‘ 1 ’ ,都會先傳輸0.56ms,也就是560us的低電平,這樣用來判斷上一個資料結束,下一個資料開始,至于傳輸的資料就是用接下來的高電平時間來判斷,
高電平時間為565um就是資料 ‘ 0 ’ ,1690um就是資料 ‘ 1 ’ ,由于在現實資料傳輸中受到環境因素的影響,所以我們需要取一個中間值來判斷,超過這個中間值就是資料 ‘ 1 ’ ,反之就是資料 ‘ 0 ’ ,
代碼
理論講了這么久了,估計都枯燥了吧,接下來就開始分析代碼吧,
重點:代碼格式一定要規范!
void main(void)
{
//我們使用的是51單片機,所以可以使用定時器來計時,
//對于延時函式,確實很方便,但是小編強烈不推薦使用延時函式,能用定時器解決的盡量不使用延時函式,
//延時函式時間不準確,至于為什么不使用延時函式,小編之后會單獨寫一篇來解釋,
TMOD = 0x01;//這兒打開定時器1,用來計時,
TR0 = 0; //關閉允許定時器1計時,當我們需要定時器1計時的時候再打開,
IT0 = 1;
EX0 = 1; //這兩句是51單片機的外部中斷1允許,并且下降沿觸發,因為紅外資料最開始是9ms低電平,所以可以使用外部中斷(不使用中斷也行),
EA = 1; //打開總中斷
while (1)
{
//while(1)回圈中的代碼后面會單獨列出,
}
}
以上就是我們程式需要打開的配置
接下來就是外部中斷程式
bit InFrared_Way = 0; //在程式的開頭我定義了一個一位元組的變數,至于作用,接下來會講,
void Int_0(void) interrupt 0 //外部中斷程式
{
//最開始我是直接在外部中斷里面寫紅外解碼程式,但是我發現無論如何都無法進入中斷程式(可能是我代碼的問題),
//然后我又想到我的老師跟我說過外部中斷程式越簡潔越好,我就改成了現在這樣,
InFrared_Way = 1; //讓變數置1,從而在主程式里判斷接受到紅外信號,
}
下面是主函式while(1)里面的代碼
if (InFrared_Way == 1) //判斷是否接收到紅外信號,若是能接收到信號,則進入函式,
{
EX0 = 0; //關閉外部中斷,防止干擾,
TR0 = 1; //允許定時器1計時,
InFrared_Init(); //這是我寫的紅外接收函式,下面會提到,這兒不做過多解釋,
TR0 = 1; //關閉允許定時器1計時,
EX0 = 1; //打開外部中斷,
InFrared_Way = 0; //清零InFrared_Way ,標志著已經結束紅外接收,
}
只剩下了紅外接收函式了
sbit INIR = P3^2; //51單片機的引腳定義,我的51板子上資料引腳連接的是P3^2引腳,
unsigned char Data[4] = {0}; //定義四組8位的資料,剛好儲存紅外信號的32位資料,
void InFrared_Init(void) //這個就是上面提到的紅外接收函式,
{
unsigned char i, j; //因為定義了4個資料,每個資料8個位,所以這兒用i表示是哪個資料,j表示資料哪個位,
TH0 = 0;
TL0 = 0; //將定時器1的時間清0,方便計時,
while (INIR == 0 && TH0 <= 35); //等待9ms低電平過去,
if (INIR == 1) //判斷是否為高電平,
{
while (INIR == 1 && TH0 <= 55); //等待4.5ms高電平過去,
//開始接收資料,
for (i = 0; i < 4; i++)
{
for (j = 0; j < 8; j++) //接收4組8位資料,
{
TH0 = 0;
TL0 = 0; //將定時器1的時間清0,方便計時,
while (INIR == 0 && TH0 <= 3); //等待560us低電平過去,
while (INIR == 1); //判斷高電平時間,
Data[i] >>= 1; //資料左移一位,使接收位默認為0,因為資料是由低位開始接收,
if (TH0 >= 7) //判斷是否超過中間值,超過就是資料1,
{
Data[i] |= 0x80; //資料寫1,默認為0,所以只需要有寫1的操作,
}
}
}
}
}
到此為止,全部函式就分享出來啦!
當然,不想一段代碼一段代碼的去復制,小編貼心的把上面代碼合成的放在下面了!
#include <STC12C5A60S2> //這個根據自己的51單片機芯片來修改,
sbit INIR = P3^2; //這個根據自己定義引腳,
bit InFrared_Way = 0;
unsigned char Data[4] = {0};
void InFrared_Init(void);
void main(void)
{
TMOD = 0x01;
TR0 = 0;
IT0 = 1;
EX0 = 1;
EA = 1;
while (1)
{
if (InFrared_Way == 1)
{
EX0 = 0;
TR0 = 1;
InFrared_Init();
TR0 = 1;
EX0 = 1;
InFrared_Way = 0;
}
}
}
void Int_0(void) interrupt 0
{
InFrared_Way = 1;
}
void InFrared_Init(void)
{
unsigned char i, j;
TH0 = 0;
TL0 = 0;時,
while (INIR == 0 && TH0 <= 35);
if (INIR == 1)
{
while (INIR == 1 && TH0 <= 55);
for (i = 0; i < 4; i++)
{
for (j = 0; j < 8; j++)
{
TH0 = 0;
TL0 = 0;
while (INIR == 0 && TH0 <= 3);
while (INIR == 1);
Data[i] >>= 1;
if (TH0 >= 7)
{
Data[i] |= 0x80;
}
}
}
}
}
以為完了?當然沒有
小編的代碼里面并沒有處理4組資料,是因為每個人使用的顯示的東西不同,小編是使用的0.96寸的OLED來處理的4組資料,有些人可能會使用數碼管來顯示,因為這兒只是討論紅外,所以并沒有介紹到其他的東西,
(以下僅僅代表個人看法,如果有大佬愿意指導在下,感恩不盡!)
對于這四組資料,我最開始使用的遙控器上的 0 — 9 這10個資料的第三組資料是順序連著的,
例如:
0 的資料碼如果是 0x10 ,那么 1 的資料碼就是 0x11 ,
但是,我換了一個遙控器之后,0 — 9 的資料碼并不是連在一起的,所以,目前的我認為,不能光看了 0 的資料碼就可以判斷 1 — 9 的資料碼,而需要實事求是的每一個去驗證,
謝謝大家!點個贊關注下博主吧,嘻嘻
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/262993.html
標籤:其他
上一篇:域格模塊移動網路信號指標介紹
下一篇:Golang學習之路—錯誤處理