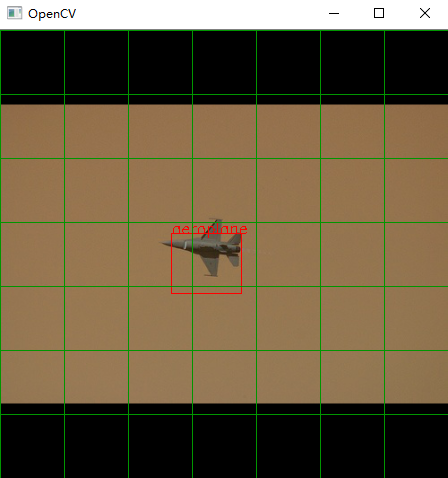
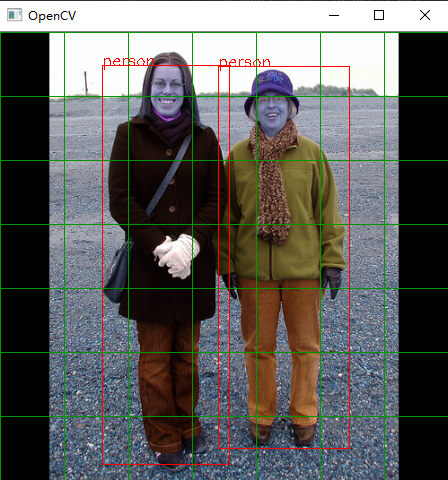
結果展示
其中綠線是我繪制的影像劃分網格,
這里的loss是我訓練的 0.77 ,由于損失函式是我自己寫的,所以可能跟大家的不太一樣,這個不重要,重要的是學習思路,
重點提示
yolov1是一個目標檢測的演算法,他是一階段的檢測演算法,
一階段(
one-stage):檢測物體的同時進行分類,(代表論文:yolov1 - yolov5)二階段(
two-stage):先檢測出物體,再進行分類,(代表論文:rcnn,fast-rcnn)
重點要理解yolov1的資料特征標注方式,
只有理解了資料特征的標注方式才可以理解他為什么可以起作用,
論文剖析
1、理解
VOC資料集的資料形式,2、從
VOC資料集中提取出標注好的資料特征,3、
yolov1的資料組織,4、
yolov1的演算法模型,5、
yolov1的準確率評估方式(IOU),6、
yolov1的損失函式,
理解VOC資料集
首先需要知道我們使用的資料集的形式,因為每一個資料集的特征標注以及組織方式都不同,
我們可以去官網下載voc的資料集,這里使用的是voc2012資料集,
VOC資料集鏡像網站. 下載voc2012的Train/Validation Data (1.9 GB),
資料集下載之后解壓出來是這樣子:
每個檔案夾存放的啥都標注好了,我們這里用不到那么多,
我們只用jpg原圖,以及每個原圖中目標的位置即可,(下邊圖片中畫紅框的兩個檔案夾)

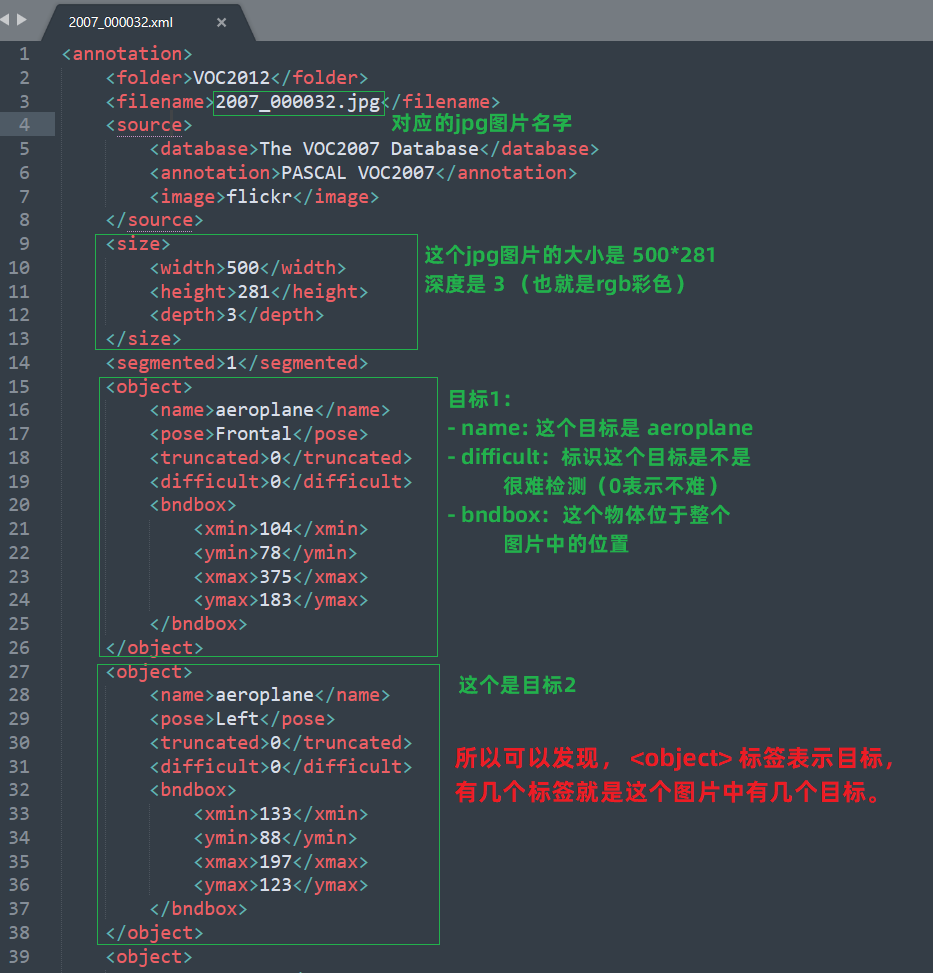
但是我們發現,Annotations檔案夾中的目標位置資訊是存放在xml中,所以我們往下分析一個xml檔案看看,
<filename>: 表示這個檔案是對應于哪一個jpg圖片的,
<size>:表示對應的jpg圖片大小,
<object>:就是這個圖片中的目標在圖片中的資訊,包括:目標名字,是否難識別,以及目標在整個圖片中的坐標位置,(有幾個 object 就是有幾個目標)
提取目標初始資料
上邊我們分析出每個圖片中有什么目標都是存盤在
xml檔案中的,所以我們需要將xml檔案的目標與類別資料提取出來,以便我們使用,
思路:
-
1、使用庫
xml.etree.ElementTree讀取xml格式的檔案,從中提取出每一個xml檔案中的所有<ojgect>標簽資料(個數就是目標的數量), -
2、將
<object>標簽提取出類別、xmin、ymin、xmax、ymax,并且將其歸一化為類別、x、y、w、h,
歸一化就是根據從目標中提取出的
xmin、ymin、xmax、ymax得到目標的寬高,分別除以整個圖片的寬高,
x:目標的中心位置x坐標,y:目標的中心位置y坐標,w:目標的寬度,h:目標的高度,
- 3、然后將歸一化的資料按照上面的格式,整理為labels檔案,
每一個
labels檔案對應于一個圖片,labels檔案中的每一行就是這個圖片中的一個目標的類別、x、y、w、h資料(一個圖片有幾個目標,對應的labels檔案就有幾行),
例子:
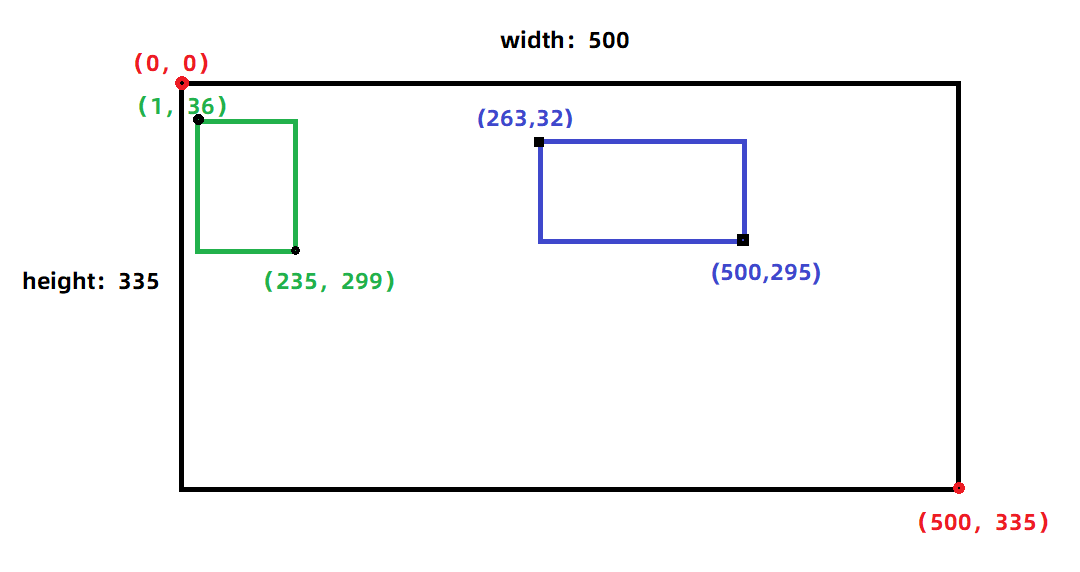
針對如下xml檔案,可以得知:
- 對應的
jpg圖片是2007_000042.jpg,并且圖片的大小是500*335的三色圖(這里的圖片大小就是用來歸一化的),- 含有兩個
<object>標簽,所以這個圖片中有兩個目標,并且目標的類別、位置坐標可以根據name、xmin、ymin、xmax、ymax得到,
<annotation>
<folder>VOC2012</folder>
<filename>2007_000042.jpg</filename>
<source>
<database>The VOC2007 Database</database>
<annotation>PASCAL VOC2007</annotation>
<image>flickr</image>
</source>
<size>
<width>500</width>
<height>335</height>
<depth>3</depth>
</size>
<segmented>1</segmented>
<object>
<name>train</name>
<pose>Unspecified</pose>
<truncated>1</truncated>
<difficult>0</difficult>
<bndbox>
<xmin>263</xmin>
<ymin>32</ymin>
<xmax>500</xmax>
<ymax>295</ymax>
</bndbox>
</object>
<object>
<name>train</name>
<pose>Unspecified</pose>
<truncated>1</truncated>
<difficult>0</difficult>
<bndbox>
<xmin>1</xmin>
<ymin>36</ymin>
<xmax>235</xmax>
<ymax>299</ymax>
</bndbox>
</object>
</annotation>
大致如下:綠色框 與 藍色框 分別是兩個目標,
使用xml檔案中已有資料,得到 labels檔案如下:
其中每一行是一個物體,每行的資料表示的意義是:
類別,x,y,w,h. (資料都是歸一化過了)

所以,這個就是最初的labels檔案的形式,
下一步就是將這個初始labels檔案資料形式,組織成可以 直接與對應圖片運行 的資料形式,
YOLOV1的資料組織
其實yolo的思想可以用一句話來代替:將一個張圖片劃分網格(通常是
7*7),然后找目標的中心落在那個網格中(得到目標中心點坐標),并且以中心點坐標為參考找出目標邊框的寬與高,
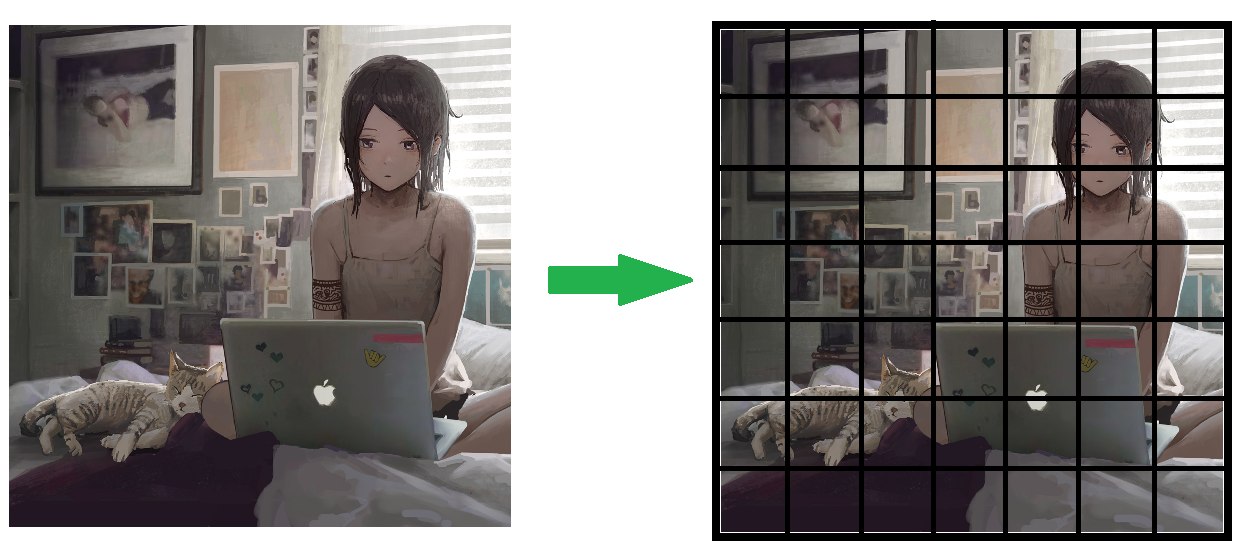
將圖片進行網格劃分
如圖,針對圖片進行
7*7的網格劃分,
找目標物體中心落所在的網格
所以這個圖片中的兩個目標
cat與person的中心點分別落在網格中的(5,1)與(3,4)兩個位置,并且可以知道這個中心點相對于當前網格的坐標(就是紫色框表示的內容),
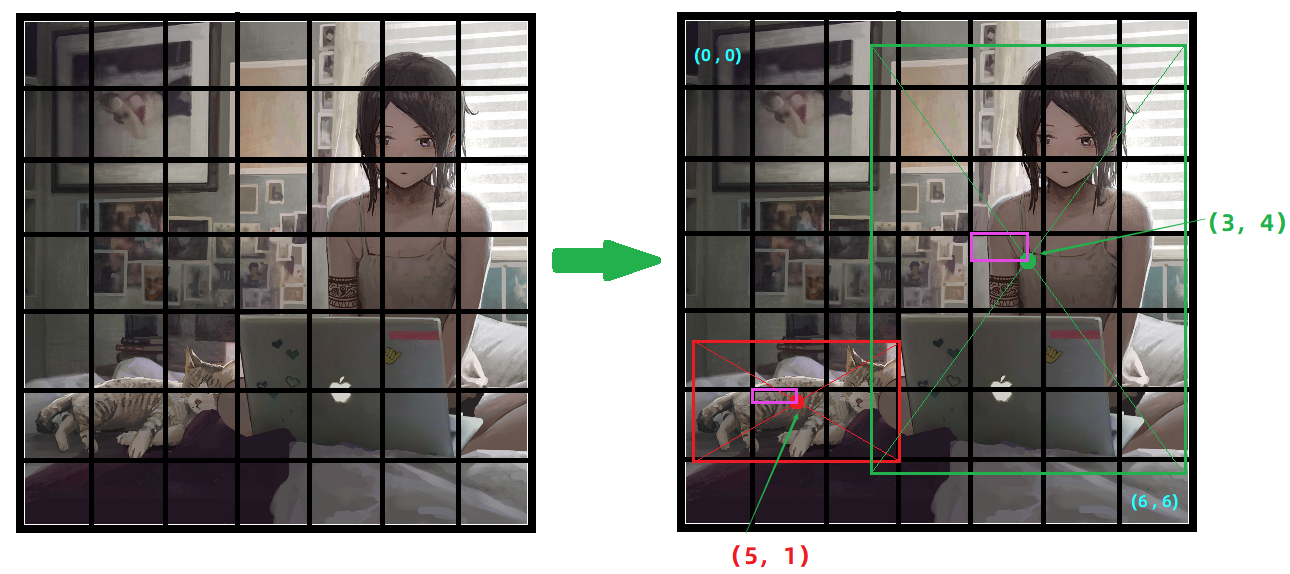
目標物體的寬高
在物體中心點找出之后,以中心點為坐標找出邊框的寬與高即可,
經過上邊的分析,我們可以發現:想要確定一個物體,只要知道它的中心點坐標,以及相對于中心點坐標的物體寬高即可,
所以:當我們的模型拿到一張圖片之后
- 首先,將圖片進行網格劃分,
- 然后,判斷每一個小網格中是否有物體,
- 如果預測有物體就預測出物體相對于本網格的坐標,以及相對于本坐標的物體寬高,
labels的組織方式
labels的資料都是來自上邊xml中提取的資料,
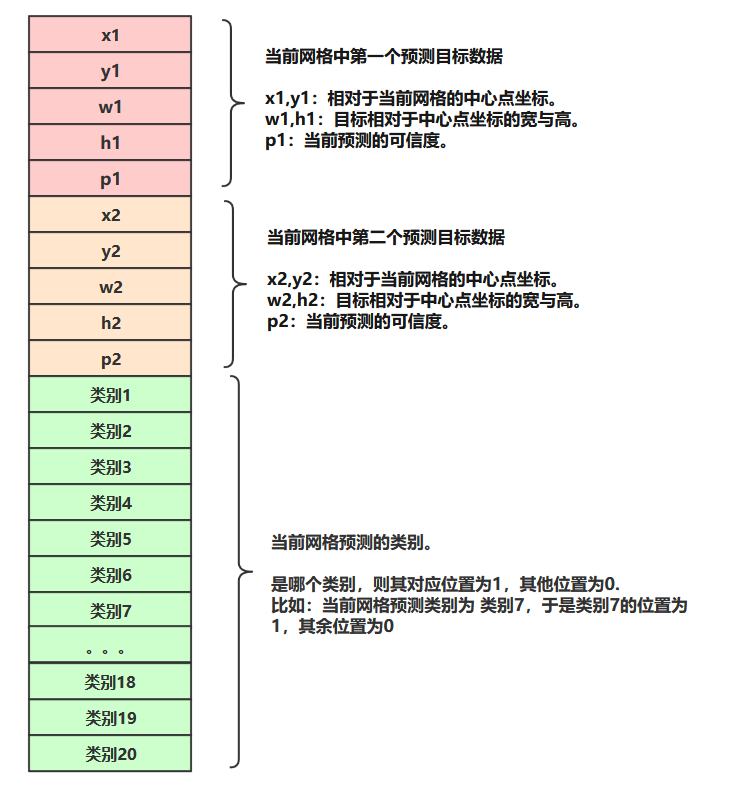
經過上邊yolo運作流程的講解,可以得知labels資料需要 針對每一個小網格 組織出:相對于當前網格中心點的坐標,寬高,預測概率,目標類別,
其中:
- 預測概率的值是 1或0,有目標的時候預測值是1,沒目標的時候預測值是0,
- 這里用20個類別,每一個網格預測的目標是什么類別,則對應的類別數字為1,否則為0 (細節見下圖),
注意:由于每一個網格中可能會有多個目標的中心點,所以這里的labels組織的時候,將每個格子預測兩個中心點,(細節見下圖)
這個圖是所有網格的資料形式,資料長度為30.
**這個圖中的所有資料都可以根據 上文從xml中提取的資料得到, **
由此可知,每個網格的labels是由長度為30的上述資料組成的;因為我們的圖片劃分為7*7個網格,所以就是有7*7個長度為30的資料組成整個圖片的lables,即整張圖片的labels資料形式為:7*7*30,labels資料矩陣如下圖所示,
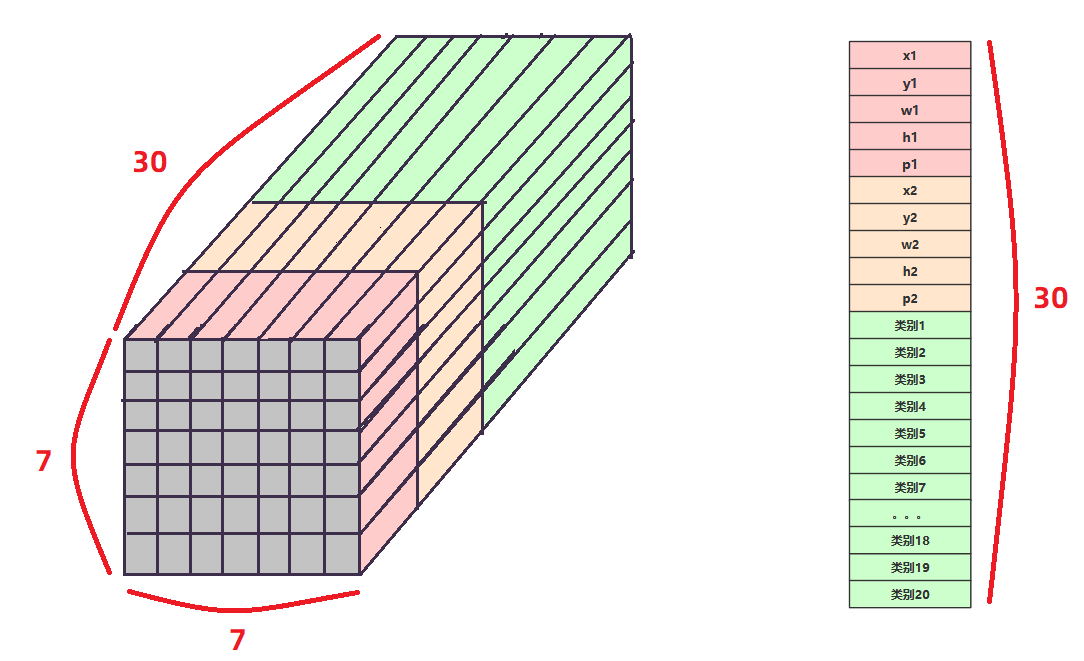
所以,我們輸入網路的資料就是圖片轉為tensor的資料,inputs維度為:[batchsize,3,448,448].
網路的輸入labels維度為:[batchsize,30,7,7]. 就是上邊的資料矩陣,
網路的輸出:[batchsize,30,7,7].
ok,上邊的資料組織完成,那么接下來就是將組織好的 inputs 與 labels 送入網路訓練即可,
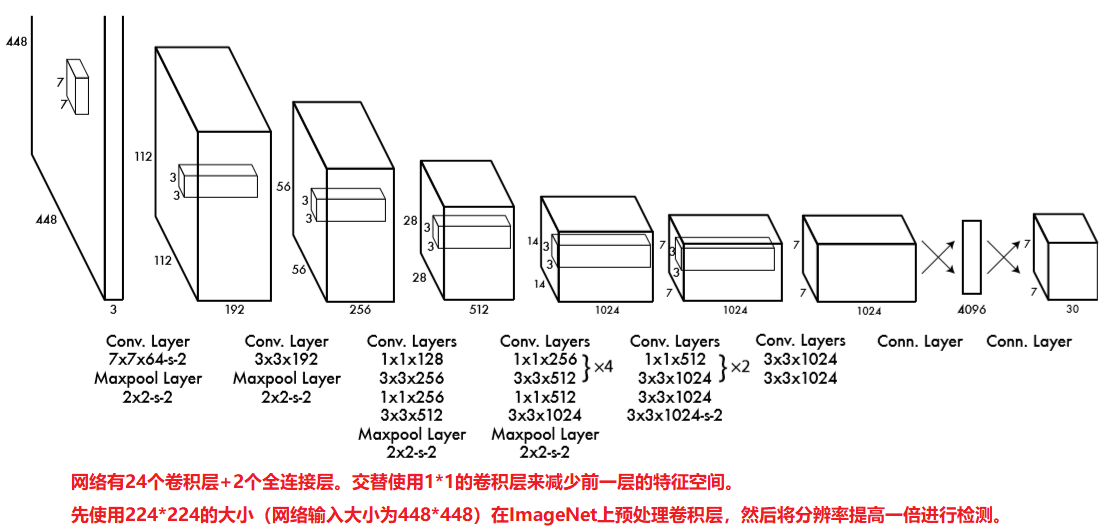
YOLOV1模型
- 網路有24個卷積層,然后是2個全連接層,簡化了1×1還原層,由3×3個卷積層組成,
- (原文使用的是imageNet作為預處理模型,然后后邊的輸出重寫成所需要的輸出,)
- 我這里使用的是基于resnet的預處理模型,
評估標準IOU
IOU就是交并比,因為原來有一個正確的目標邊框資料,此時我們預測一個邊框資料之后,計算出兩個邊框相交的面積,在計算出相并的面積,然后求出比值,就是交并比,
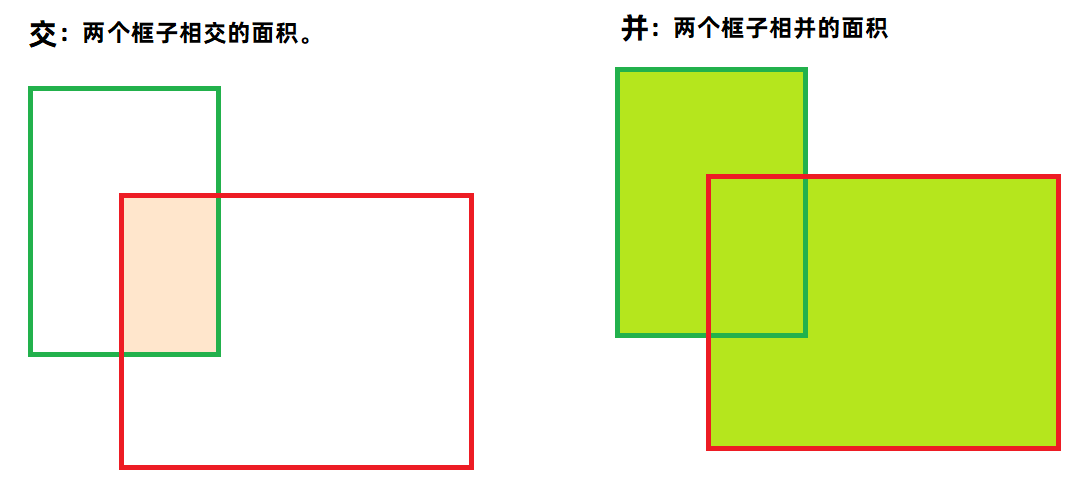
交并比越 大 ,說明兩個框子越相似,說明預測結果越好,最大 IOU=1 ,就是預測框與真實框重合,
交并比越 小 ,說明兩個框子越不相似,說明預測結果越差,最小 IOU=0 ,就是預測框與真實框沒有一點相交的地方,
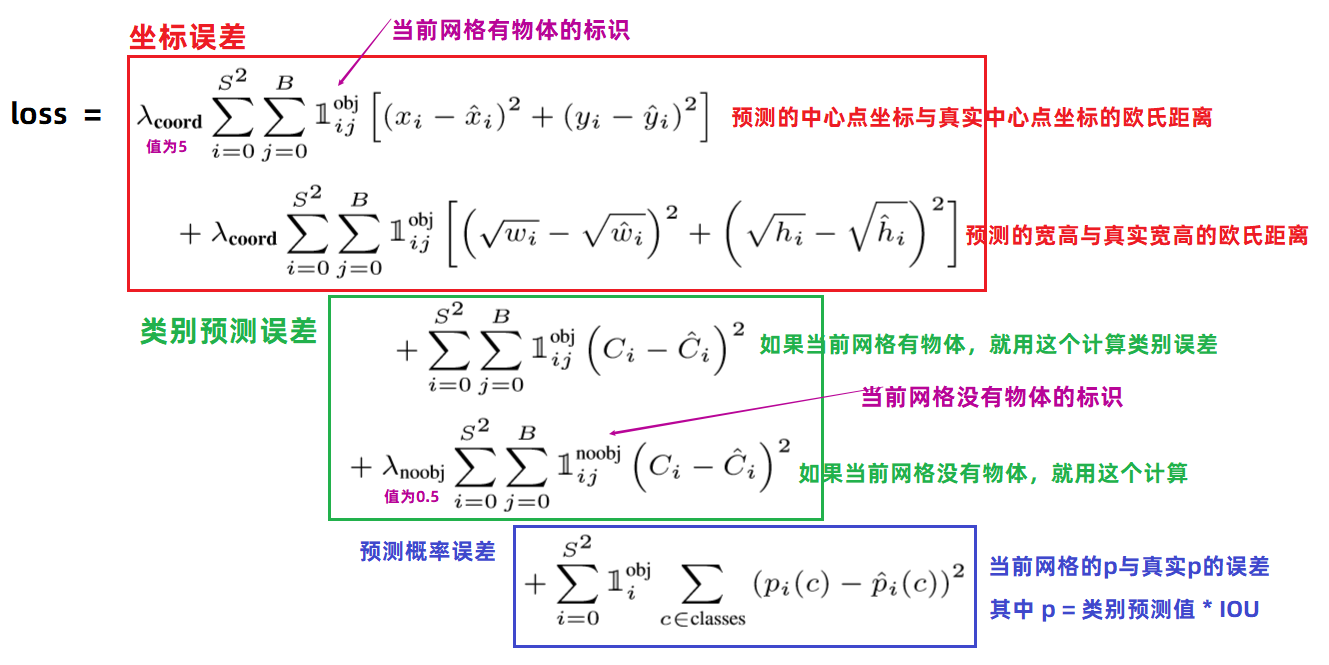
損失函式
三部分組成,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/270790.html
標籤:其他
上一篇:ResNet的個人總結