記得點贊,有問題請留言
前言
??在嵌入式的開發中,經常要用到通過串口列印除錯資訊,有時為了節省成本,而沒有多余的串口可用,因此列印除錯資訊可以采用:
方式1:工程中添加SEGGER_RTT除錯列印
方式2:模擬串口
UART作業原理
??UART即通用異步收發器,是一種串行通信方式,資料在傳輸程序中是通過一位一位地進行傳輸來實作通信的,串行通信方式具有傳輸線少,成本底等優點,缺點是速度慢,串行通信分為兩種型別:同步通信方式和異步通信方式,但一般多用異步通信方式,主要因為接受和發送的時鐘是可以獨立的這樣有利于增加發送與接收的靈活性,異步通信是一個字符接著一個字符傳輸,一個字符的資訊由起始位、資料位、奇偶校驗位和停止位組成,
??每一個字符的傳輸靠起始位來同步,字符的前面一位是起始位,用下降沿通知收方開始傳輸,緊接著起始位之后的是資料位,傳輸時低位在前高位在后,字符本身由5~8位資料位組成,資料位后面是奇偶校驗位,最后是停止位,停止位是用高電平來標記一個字符的結束,并為下一個字符的傳輸做準備,停止位后面是不同長度的空閑位,停止位和空閑位都規定為高電平,這樣可以保證起始位有一個下降沿,UART的幀格式如圖
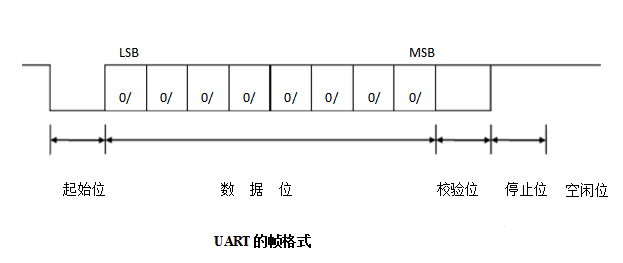
??UART的幀格式包括線路空閑狀態(idle,高電平)、起始位(start bit,低電平)、5~8位資料位(data bits)、校驗位(parity bit,可選)和停止位(stop bit,位數可為1、1.5、2位),
UART模擬原理
??UART的模擬方式基本就是定時器+IO口實作,
方案1:只列印不接收
??如果在實際使用中只是為了列印log而不接收資料,可以采用DWT加普通IO口的方式;
#define VCOM_BOUND 115200
#define VCOM_PIN GPIO_Pin_11
#define VCOM_PORT GPIOA
#define VCOM_PIN_HIGH VCOM_PORT->BSRR = VCOM_PIN
#define VCOM_PIN_LOW VCOM_PORT->BRR = VCOM_PIN
#define BSP_REG_DEM_CR (*(volatile unsigned int *)0xE000EDFC) //DEMCR暫存器
#define BSP_REG_DWT_CR (*(volatile unsigned int *)0xE0001000) //DWT控制暫存器
#define BSP_REG_DWT_CYCCNT (*(volatile unsigned int *)0xE0001004) //DWT時鐘計數暫存器
#define BSP_REG_DBGMCU_CR (*(volatile unsigned int *)0xE0042004)
#define DEF_BIT_00 0x01u
#define DEF_BIT_24 0x01000000u
#define BSP_BIT_DEM_CR_TRCENA DEF_BIT_24
#define BSP_BIT_DWT_CR_CYCCNTENA DEF_BIT_00
static unsigned int sys_clock = 48000000;
inline void dwt_start(void)
{
BSP_REG_DEM_CR |= (unsigned int)BSP_BIT_DEM_CR_TRCENA;
BSP_REG_DWT_CYCCNT = (unsigned int)0u; //初始化CYCCNT暫存器
BSP_REG_DWT_CR |= (unsigned int)BSP_BIT_DWT_CR_CYCCNTENA; //開啟CYCCNT
}
inline void dwt_stop(void)
{
BSP_REG_DWT_CR = 0;
}
void vcom_pin_init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitStructure.GPIO_Pin = VCOM_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(VCOM_PORT, &GPIO_InitStructure);
GPIO_SetBits(VCOM_PORT,VCOM_PIN);
VCOM_PIN_HIGH;
}
void vcom_put_char(char ch)
{
int i;
int dat[8];
uint32_t sys_clk, bit_width;
volatile uint32_t time_stamp;
sys_clk = sys_clock/1000000;
bit_width = 1000000*sys_clk/VCOM_BOUND;
for(i=0; i<8; i++)
{
if(ch & 0x01)
dat[i] = 1;
else
dat[i] = 0;
ch >>= 1;
}
OS_CPU_SR cpu_sr;
enter_critical();//以下代碼進行臨界保護,防止被中斷打斷造成發送誤碼
dwt_start();
VCOM_PIN_LOW; //發送起始位
time_stamp = BSP_REG_DWT_CYCCNT;
while(BSP_REG_DWT_CYCCNT < (time_stamp+bit_width));
for(i=0; i<8; i++)
{
if(dat[i])
VCOM_PIN_HIGH;
else
VCOM_PIN_LOW;
time_stamp = BSP_REG_DWT_CYCCNT;
while(BSP_REG_DWT_CYCCNT < (time_stamp+bit_width)); //發8bit 資料位
}
VCOM_PIN_HIGH;
time_stamp = BSP_REG_DWT_CYCCNT;
while(BSP_REG_DWT_CYCCNT < (time_stamp+bit_width)); //發停止位
dwt_stop();
exit_critical();
}
void vcom_printf(const char *fmt, ...)
{
char buf[0x80];
int i;
va_list ap;
memset(buf, 0x00, sizeof(buf));
va_start(ap, fmt);
vsnprintf(buf, sizeof(buf), fmt, ap);
va_end(ap);
i = 0;
while(buf[i])
{
vcom_put_char(buf[i]);
i++;
}
}
方案2:半雙工UART
實作方式: 普通定時器+普通IO口中斷+fifo
/**
*軟體串口的實作(IO模擬串口)
* 波特率:9600 1-8-N
* TXD : PC13
* RXD : PB14
* 使用外部中斷對RXD的下降沿進行觸發,使用定時器4按照9600波特率進行定時資料接收,
* Demo功能: 接收11個資料,然后把接收到的資料發送出去
*/
#define OI_TXD PCout(13)
#define OI_RXD PBin(14)
#define BuadRate_9600 100
u8 len = 0; //接收計數
u8 USART_buf[11]; //接識訓沖區
enum{
COM_START_BIT,
COM_D0_BIT,
COM_D1_BIT,
COM_D2_BIT,
COM_D3_BIT,
COM_D4_BIT,
COM_D5_BIT,
COM_D6_BIT,
COM_D7_BIT,
COM_STOP_BIT,
};
u8 recvStat = COM_STOP_BIT;
u8 recvData = 0;
void IO_TXD(u8 Data)
{
u8 i = 0;
OI_TXD = 0;
delay_us(BuadRate_9600);
for(i = 0; i < 8; i++)
{
if(Data&0x01)
OI_TXD = 1;
else
OI_TXD = 0;
delay_us(BuadRate_9600);
Data = Data>>1;
}
OI_TXD = 1;
delay_us(BuadRate_9600);
}
void USART_Send(u8 *buf, u8 len)
{
u8 t;
for(t = 0; t < len; t++)
{
IO_TXD(buf[t]);
}
}
void IOConfig(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
EXTI_InitTypeDef EXTI_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO|RCC_APB2Periph_GPIOB|RCC_APB2Periph_GPIOC, ENABLE); //使能PB,PC埠時鐘
//SoftWare Serial TXD
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽輸出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度為50MHz
GPIO_Init(GPIOC, &GPIO_InitStructure);
GPIO_SetBits(GPIOC,GPIO_Pin_13);
//SoftWare Serial RXD
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource14);
EXTI_InitStruct.EXTI_Line = EXTI_Line14;
EXTI_InitStruct.EXTI_Mode=EXTI_Mode_Interrupt;
EXTI_InitStruct.EXTI_Trigger=EXTI_Trigger_Falling; //下降沿觸發中斷
EXTI_InitStruct.EXTI_LineCmd=ENABLE;
EXTI_Init(&EXTI_InitStruct);
NVIC_InitStructure.NVIC_IRQChannel= EXTI15_10_IRQn ;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=2;
NVIC_InitStructure.NVIC_IRQChannelSubPriority =2;
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
void TIM4_Int_Init(u16 arr,u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE); //時鐘使能
//定時器TIM4初始化
TIM_TimeBaseStructure.TIM_Period = arr; //設定在下一個更新事件裝入活動的自動重裝載暫存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //設定用來作為TIMx時鐘頻率除數的預分頻值
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //設定時鐘分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上計數模式
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure); //根據指定的引數初始化TIMx的時間基數單位
TIM_ClearITPendingBit(TIM4, TIM_FLAG_Update);
TIM_ITConfig(TIM4,TIM_IT_Update,ENABLE ); //使能指定的TIM3中斷,允許更新中斷
//中斷優先級NVIC設定
NVIC_InitStructure.NVIC_IRQChannel = TIM4_IRQn; //TIM4中斷
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //先占優先級1級
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //從優先級1級
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能
NVIC_Init(&NVIC_InitStructure); //初始化NVIC暫存器
}
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//設定中斷優先級分組為組2:2位搶占優先級,2位回應優先級
delay_init();
IOConfig();
TIM4_Int_Init(107, 71); //1M計數頻率
while(1)
{
if(len > 10)
{
len = 0;
USART_Send(USART_buf,11);
}
}
}
void EXTI15_10_IRQHandler(void)
{
if(EXTI_GetFlagStatus(EXTI_Line14) != RESET)
{
if(OI_RXD == 0)
{
if(recvStat == COM_STOP_BIT)
{
recvStat = COM_START_BIT;
TIM_Cmd(TIM4, ENABLE);
}
}
EXTI_ClearITPendingBit(EXTI_Line14);
}
}
void TIM4_IRQHandler(void)
{
if(TIM_GetFlagStatus(TIM4, TIM_FLAG_Update) != RESET)
{
TIM_ClearITPendingBit(TIM4, TIM_FLAG_Update);
recvStat++;
if(recvStat == COM_STOP_BIT)
{
TIM_Cmd(TIM4, DISABLE);
USART_buf[len++] = recvData;
return;
}
if(OI_RXD)
{
recvData |= (1 << (recvStat - 1));
}else{
recvData &= ~(1 << (recvStat - 1));
}
}
}
參考代碼:https://github.com/sckuck-bit/SoftWareSerial
方案2:全雙工UART
實作思想:采用定時器的capture和compare,要求定時器與IO對應
代碼:略
結論
串口列印會占用CPU,除錯完成記得關閉除錯資訊,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/271451.html
標籤:其他