化作塵所有專案開源!!!
這里資料還沒準備好,先關注收藏一下,馬上就發了,,,
一、專案描述
專案是2020年TI杯電子設計大賽中的題目類似設計,用來巡線與速度調節都可以參考此教程原始碼
2020年TI杯電子設計大賽中的題目
1.任務
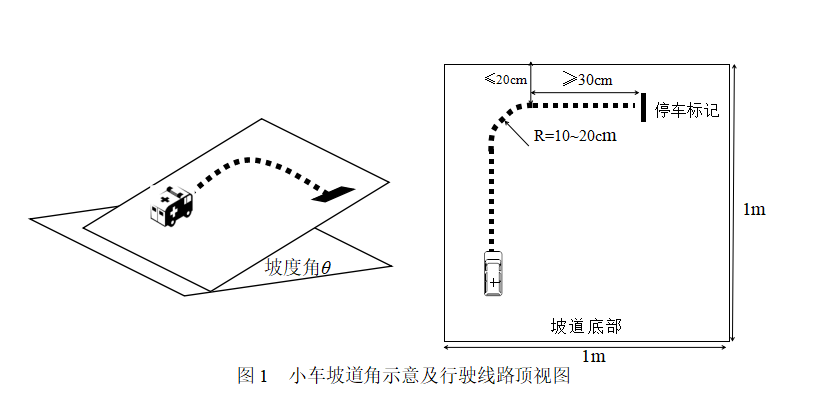
利用TI的MSP430/MSP432平臺,設計制作一個四輪電動小車,要求小車能沿著指定路線在坡道上自動循跡騎線行駛,小車必須獨立運行,車外不能使用任何設備(包括電源),小車(含電池)重量小于1.5kg,外形尺寸在地面投影不大于25cm×25cm,坡道用長、寬約1m的細木工板制作,允許板上有木質本色及自然木紋,木工板表面鋪設畫有1cm×1cm黑白間隔的紙條(以下簡稱為標記線)作為路線指示;標記線起始段為直線,平行于木板兩邊;標記線在坡頂轉向90°,轉彎半徑20cm;標記線平行坡頂距離≥30cm,距坡頂距離≤20cm;標記線總長度為1m,停車標記為寬1cm長5cm的黑色線條,垂直于坡頂標記線,小車坡度角示意及行駛線路頂視圖如圖1所示,
2.要求
(1)坡度角θ=0°,電動小車能夠沿標記線自動騎線行駛,在停車點停車;小車上標記點到停車標記中心線的垂直距離誤差≤2cm,停車時立即發出聲音提示,小車行駛程序中,其地面投影不得脫離標記線, (15分)
(2)在完成(1)的基礎上,電動小車能夠設定行駛時間,自動控制小車勻速通過1米長的線路,在停車點停車,行駛時間可在10s~20s間設定,誤差絕對值≤1s,行駛程序中不得碾壓、脫離標記線,時間誤差每超過1s扣1分, (20分)
(3)坡度角θ=10°,完成要求(2)的動作, (20分)
(4)可任意指定坡度角θ在11°~30°,完成要求(2)的動作, (20分)
(5)在完成(4)后,盡量增加坡度角θ,完成要求(2)動作, (20分)
(6)其他, (5分)
設計報告:
| 項 目 | 主要內容 | 滿分 |
| 方案論證 | 比較與選擇,方案描述 | 3 |
| 理論分析與計算 | 系統相關引數設計 | 5 |
| 電路與程式設計 | 系統組成,原理框圖與各部分的電路圖,系統軟體與流程圖 | 5 |
| 測驗方案與測驗結果 | 測驗結果完整性,測驗結果分析 | 5 |
| 設計報告結構及規范性 | 摘要,正文結構規范,圖表的完整與準確性, | 2 |
| 總分 | 20 |
3.說明
(1)本題目必須使用指定的MSP430/MSP432平臺,并將該平臺置于顯著位置便于評測,不得另外使用其它CPU控制芯片,
(2)不得采用履帶小車及帶刺輪胎,小車輪胎采用橡膠塑料等柔性材質,不得在其表面涂抹粘性物質等,行駛路面不得鋪設除標記線外的任何材料,小車全程在木工板上行駛,
(3)小車設定模式后自動行駛,中途不得人工介入控制,在要求(2)~(5)的測驗中,小車應勻速行駛,停頓、打滑、碾壓標記線每次扣除2分,
(4)小車標記點:小車到達停車線的標記點自定,并在行駛前明確標記在車體上,以便測量,
(5)所有測驗中,行駛程序時間超過30s、小車投影脫離標記線或停車誤差超過2cm,均視為失敗,
(6)要求(5)中最大角度的測驗,θ由選手自己選定,
(7)每項測驗程序允許測驗兩次,取最好成績,坡度角可以用安卓手機上的“指南針”APP軟體測量,
二、制作選材
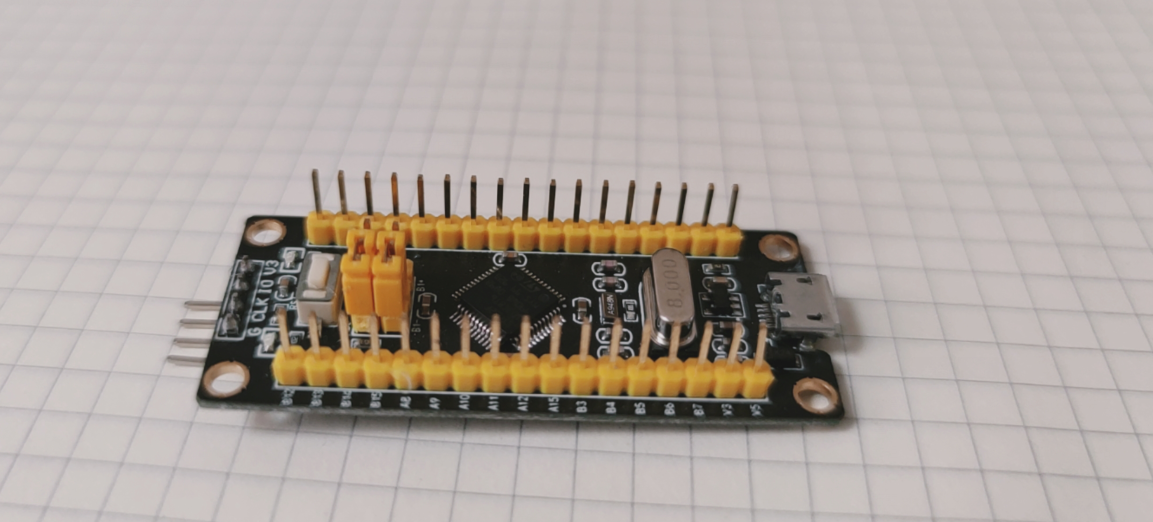
1、主控芯片stm32f103c8t6
STM32F103C8T6是一款基于ARM Cortex-M 內核STM32系列的32位的微控制器,程式存盤器容量是64KB
STM32 F1系列為Cortex-M3基礎型MCU ,其中增強型STM32F103- 72 MHz CPU,具有高達1MB的Flash、電機控制、USB和CAN,
其FLASH(KB)大小為64
RAM(KB)大小為20
封裝方式采用LQFP48
通用I/O口個數為37
作業電壓為2~3.6V
16位定時器個數4
電機控制定時器個數1
CAN個數1
2、編碼電機
型號MG513 p30 12v
轉動一圈390個脈沖
減速比1比30
然后通過獲取每100毫秒的脈沖個數
就可以計算出速度的大小

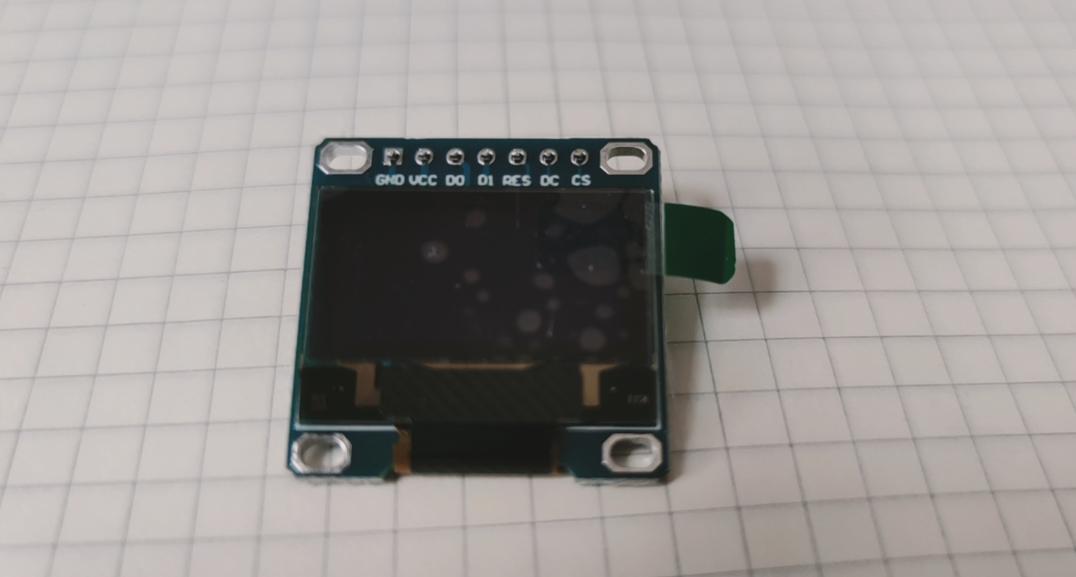
3、7針0.96寸oled顯示屏
4、舵機
看著挺高級的,馬力大,不過控制代碼與那種兩塊錢的一樣,模擬控制,PWM控制,用來控制方向

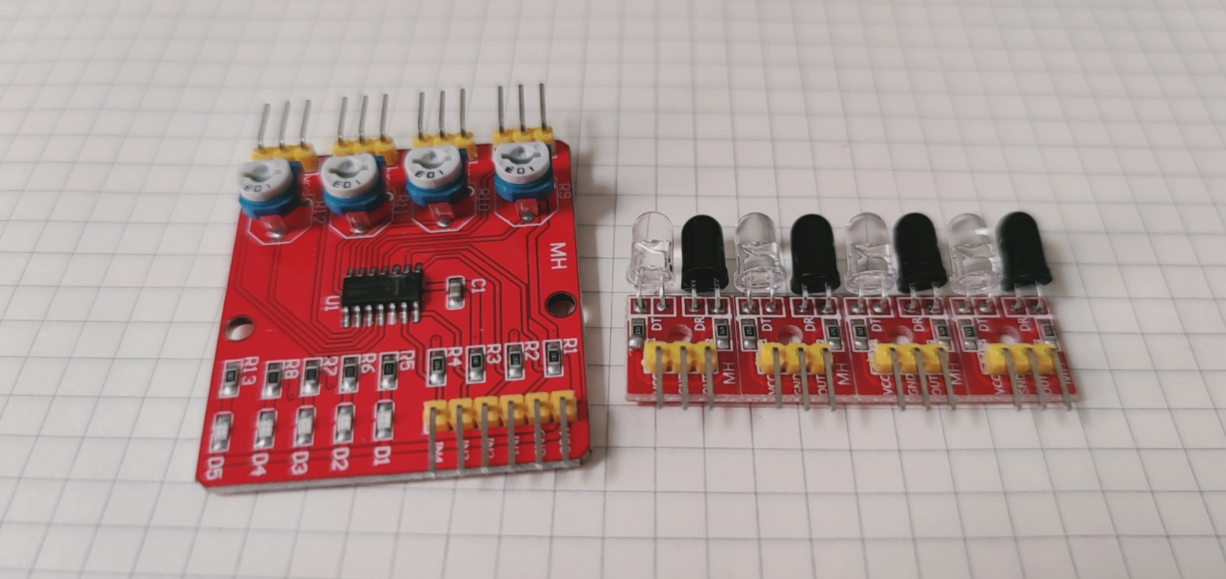
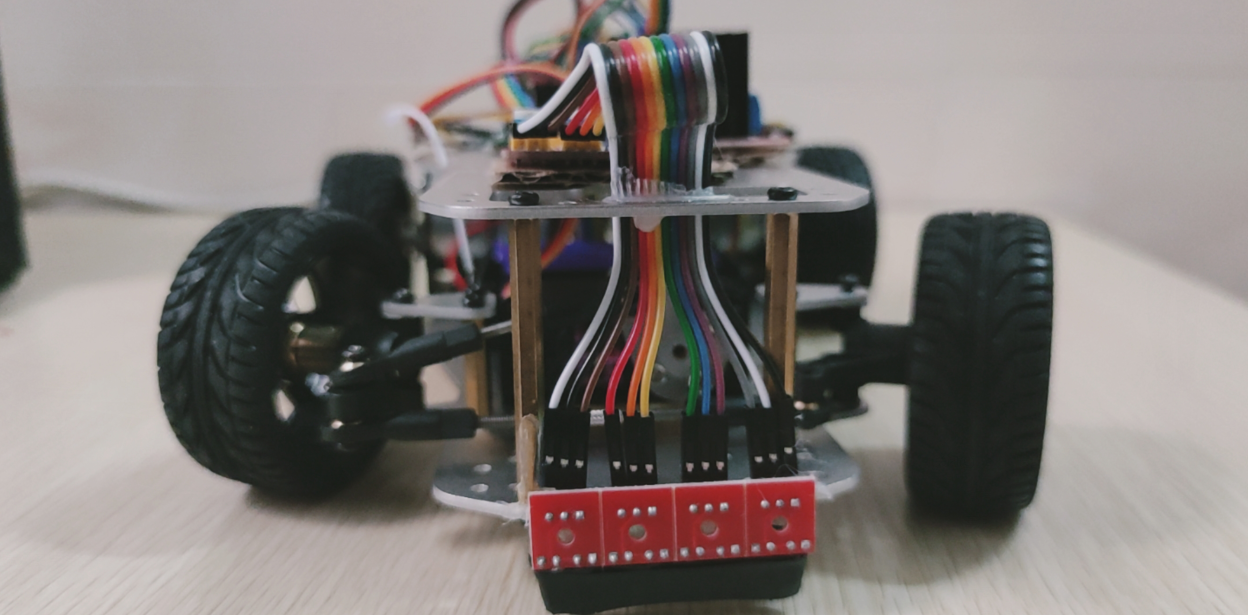
4、紅外傳感器模塊
4個紅外對管,一塊模擬轉數字模塊
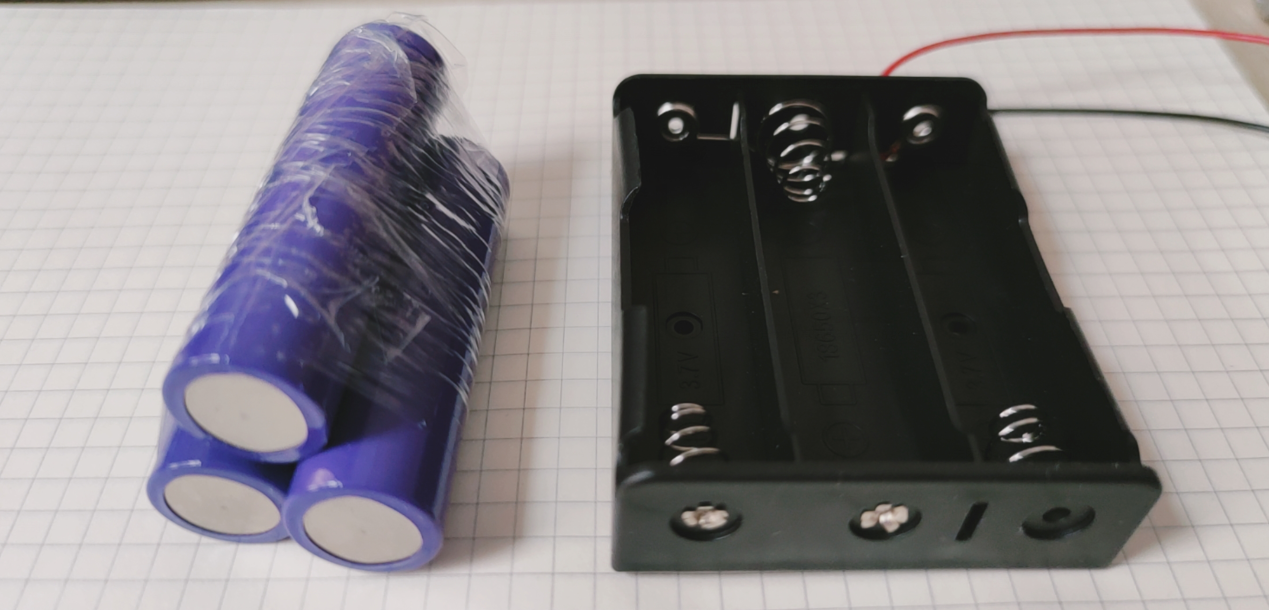
5、電源18650+電池座
經濟實惠
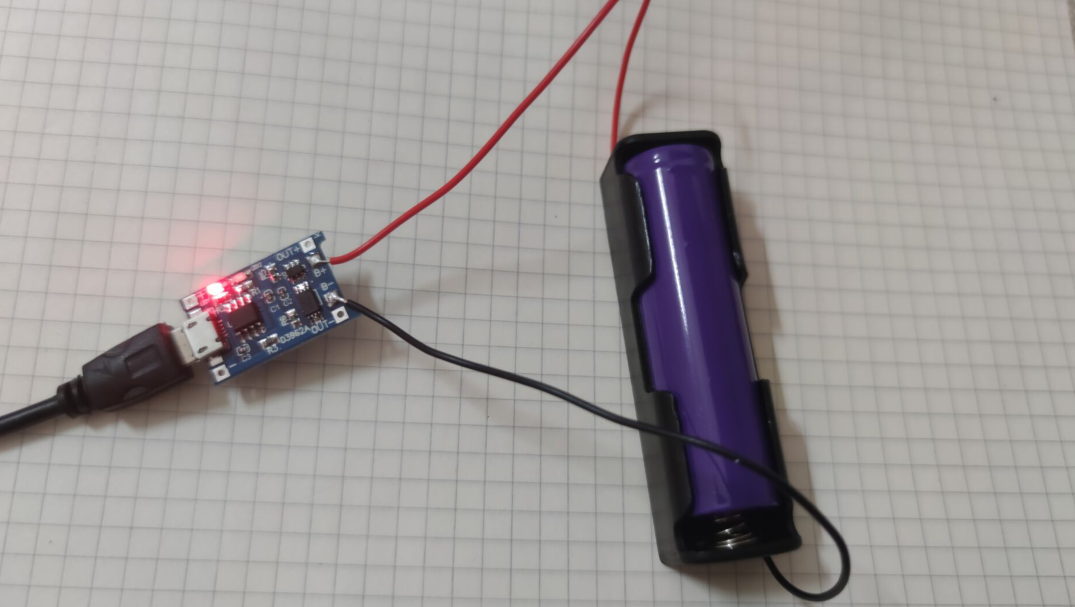
6、鋰電池充電器
一個模塊加一個電池座,加起來不到2塊錢
商品鏈接我得整理一下,,,
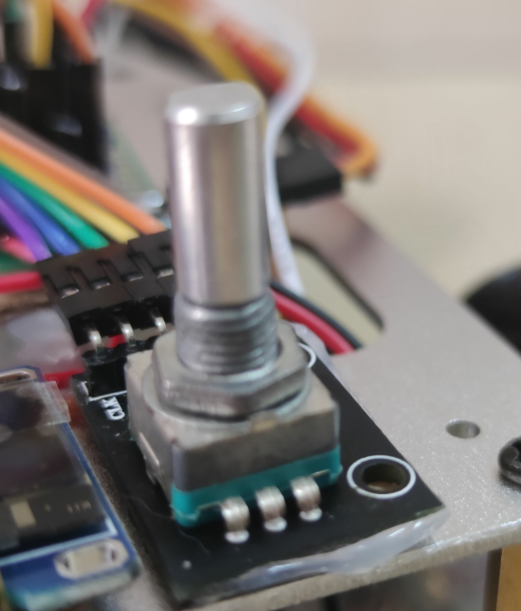
7、旋轉編碼器,
用來調節時間的,按下小車就可以跑了
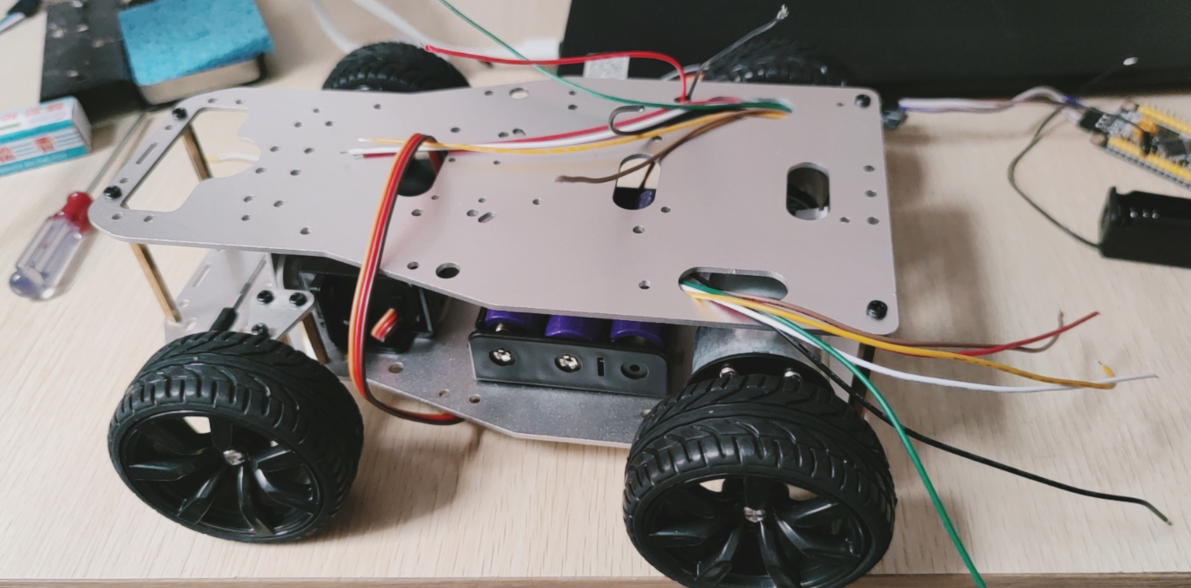
7、其實編碼電機與舵機小車上面都有,直接買一個小車車身
買來是散裝的,裝了好久裝好
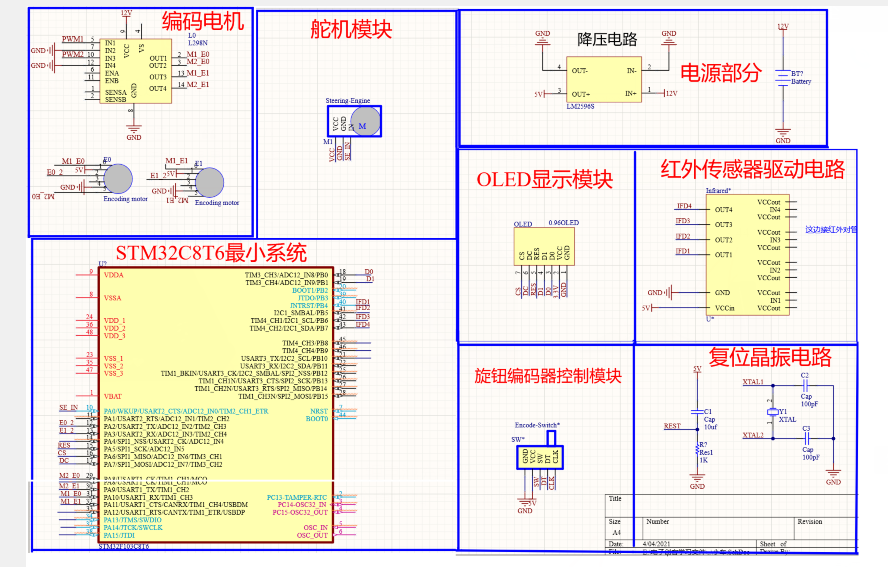
三、原理圖設計
首先就是要進行硬體設計,連接好了硬體,軟體就好辦了
原理圖設計:(可能有點模糊,建議下載我的資料里面有原圖)
然后開始連接硬體
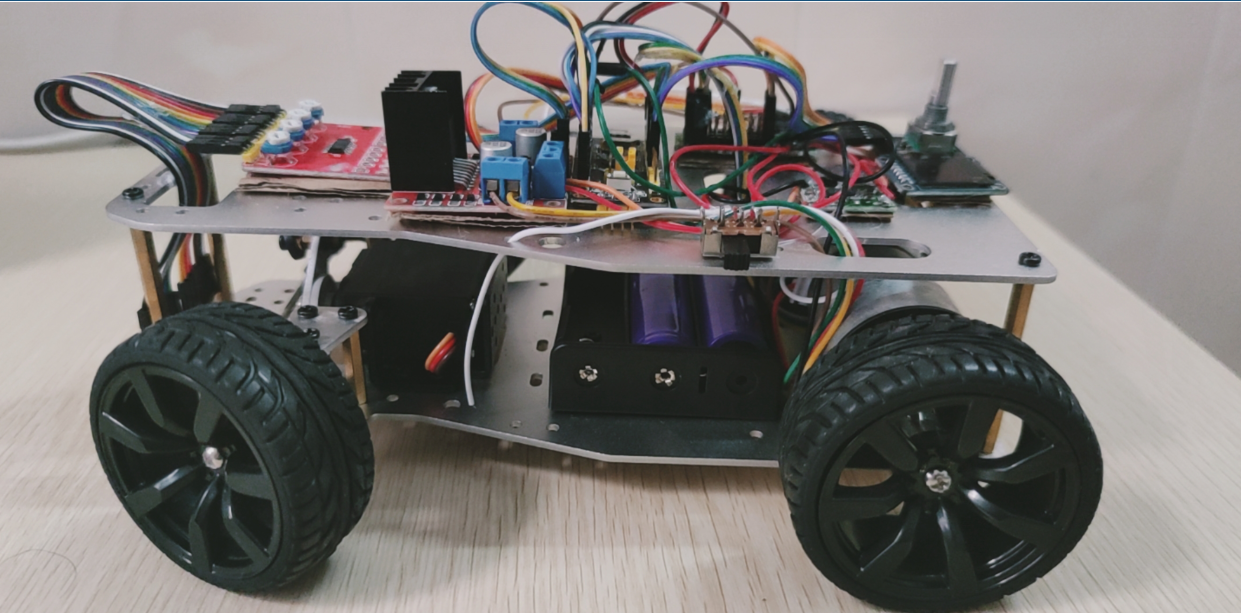
連接好了硬體,寫程式就可以除錯了…
硬體與程式除錯用了兩天時間總算搞定了接下來開始測量資料
四、資料測量
功耗測量:
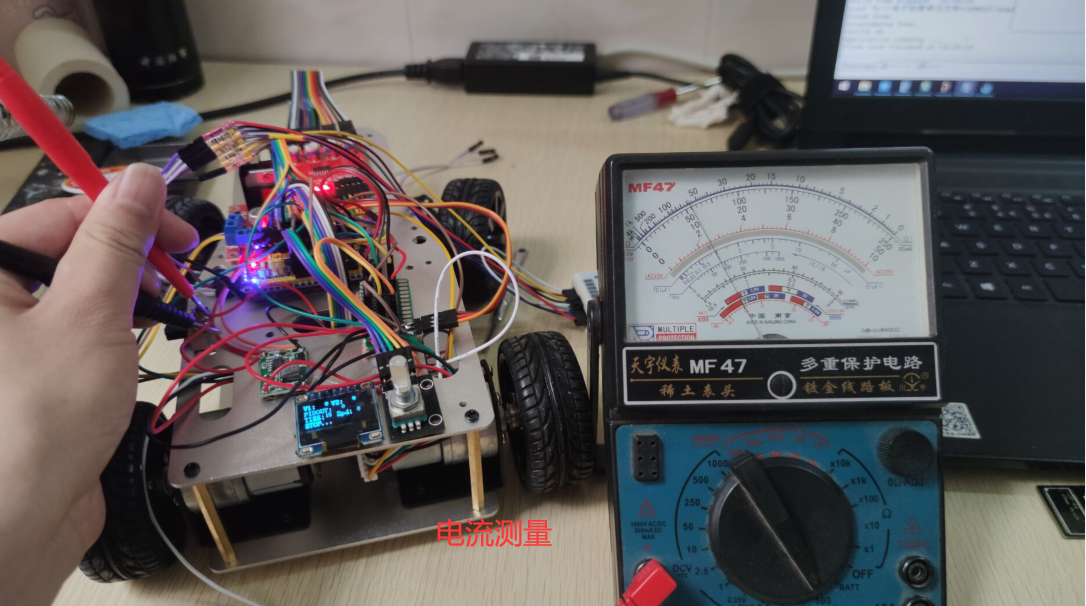
設定全程1.5m走的時間:
| 時間 | 電流 | 電壓 |
| 靜態 | 111mA | 11.5V |
| 10s | 242mA | 11.1v |
| 11s | 238mA | 11.1v |
| 12s | 228mA | 11.1v |
| 13s | 224mA | 11.2v |
| 14s | 204mA | 11.1v |
| 15s | 191mA | 11.2v |
| 16s | 189mA | 11.3v |
| 17s | 188mA | 11.3v |
| 18s | 187mA | 11.2v |
| 19s | 184mA | 11.3v |
| 20s | 185mA | 11.3v |
| 21s | 183mA | 11.2v |
| 22s | 181mA | 11.3v |
| 23s | 179mA | 11.3v |
| 24s | 177mA | 11.3v |
| 25s | 174mA | 11.4v |
| 26s | 171mA | 11.4v |
| 27s | 168mA | 11.4v |
2、OLED速度監測
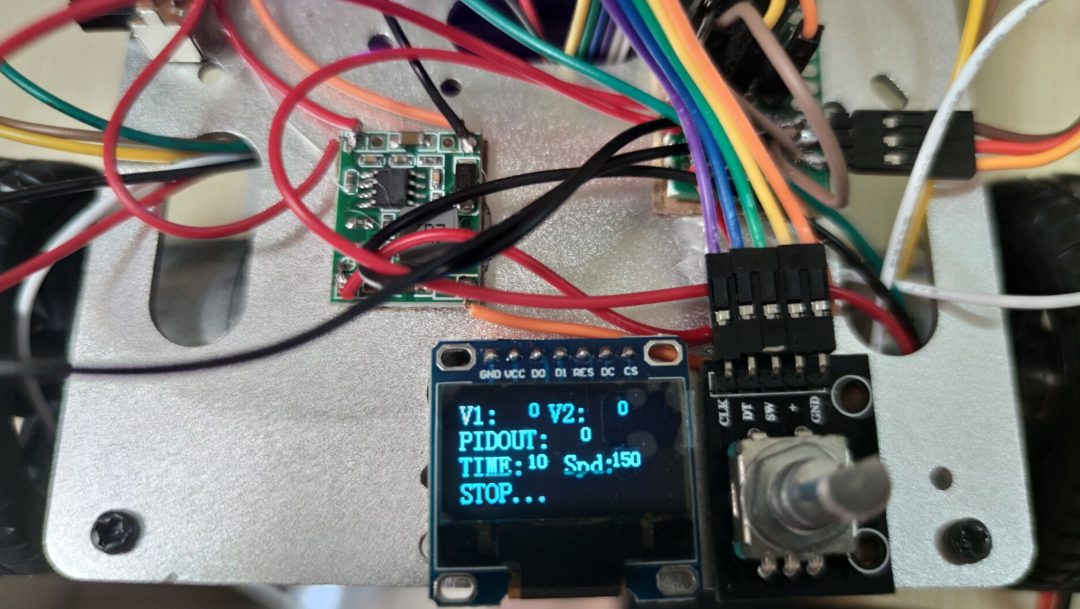
顯示屏資料說明:
v1 v2左右輪實時速度
pidout輸出pwm值
time 設定時間 speed通過設定時間計算得到的速度,因為路程固定
running stop運行狀態
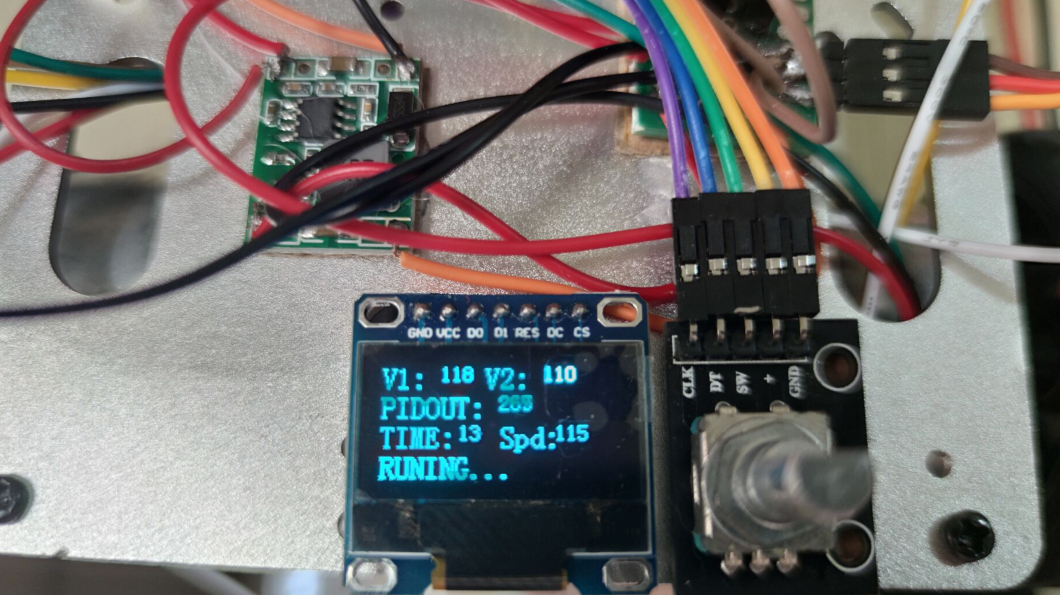
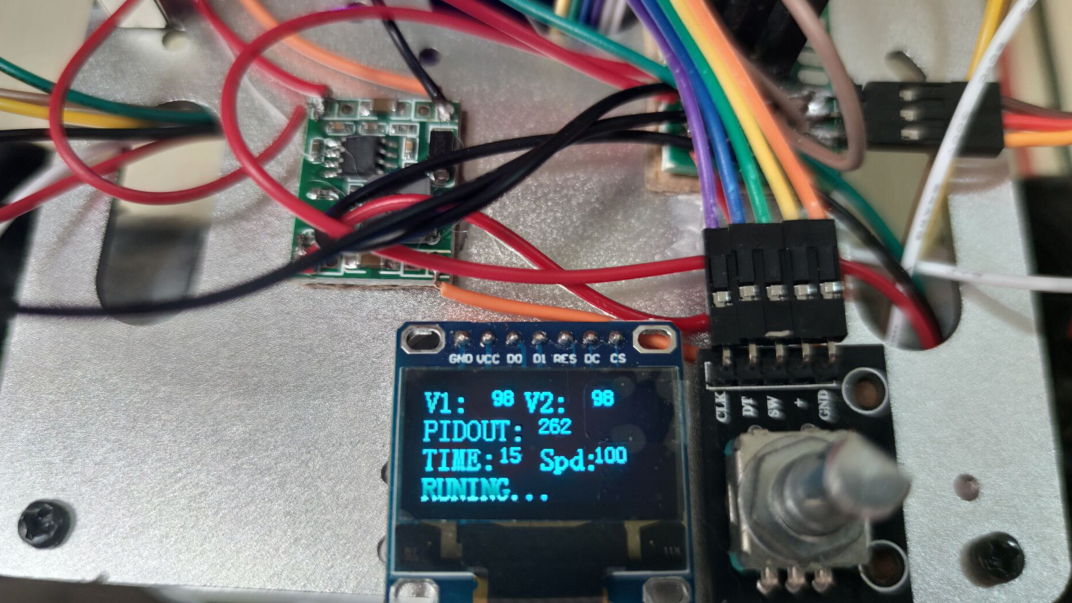
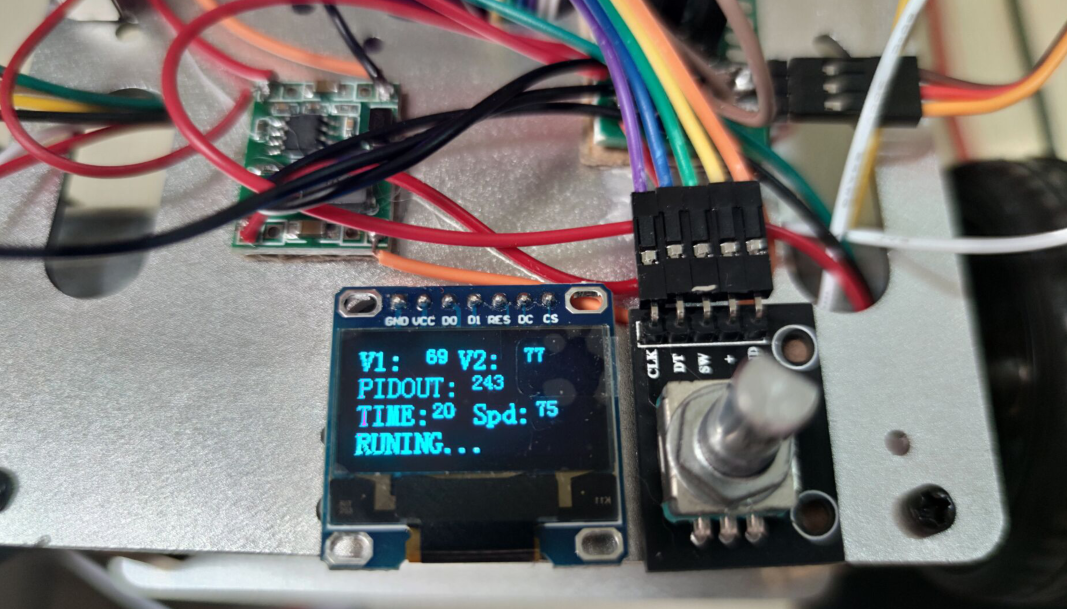
可以看到PID演算法起到了良好的效果,很好的把速度恒定在指定范圍之內
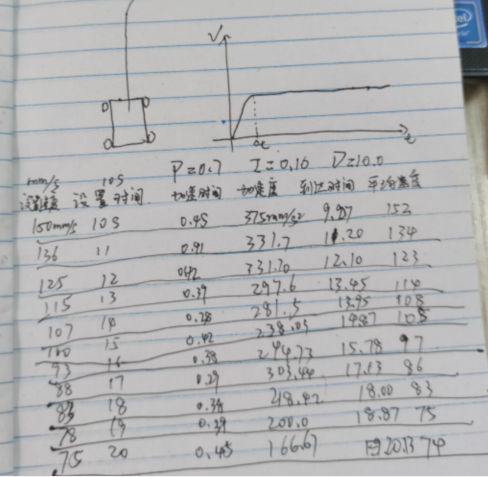
平地測量場景:

記錄資料
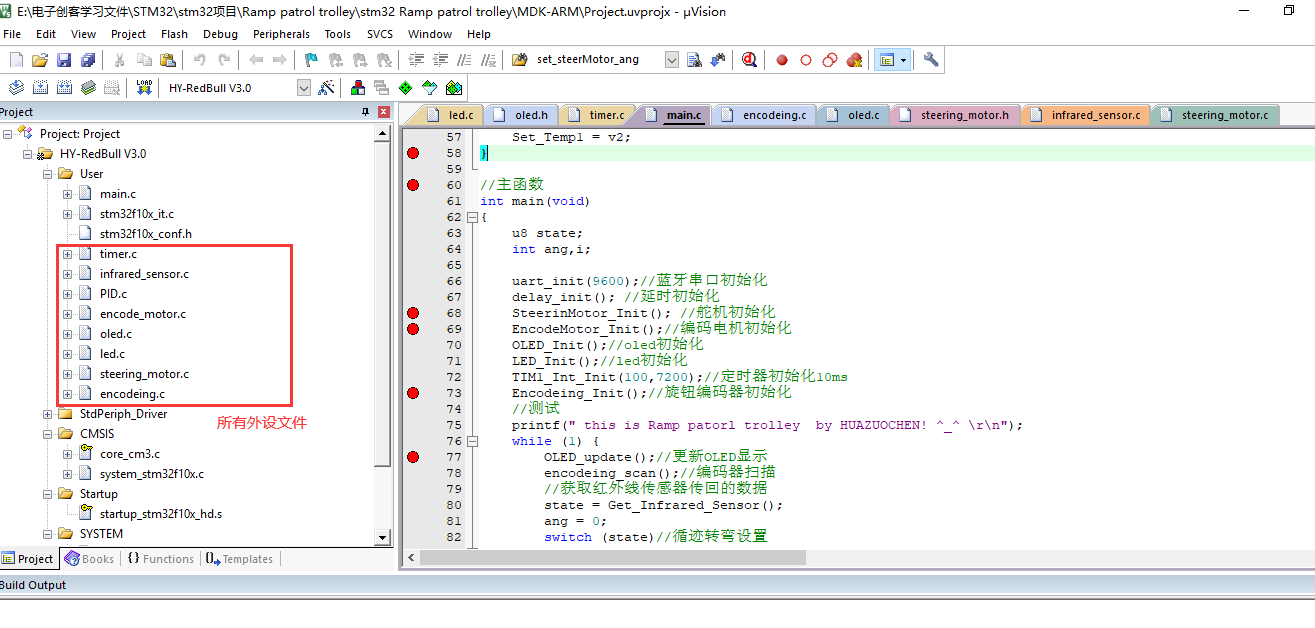
五、程式設計
1、主程式設計
主函式它是執行了整個程式的入口點,
首先初始設定定時器引數,設定TIM1 16位定時器遞增計數,設定定時器時間10MS,主要用來在定時器中斷測量小車速度與PID演算法呼叫
配置TIM4為PWM模式,設定周期為30ms,298能夠反應過來,周期太大小車會有抖動,通過脈寬來調節小車速度,脈寬越大,小車運動越快,設定計數器為1000向上計數,也就是重裝載值設定1000小車最快,設定重裝載值0小車不運動
配置TIM3為PWM模式,根據舵機的特性,配置周期為30MS,向上計數模式,計數器設定為3000,當脈寬長度為28MS時,舵機剛好再0度位置,所以初始化重裝載暫存器為2800,上電默認向前方向
配置紅外傳感器4個輸入引腳為輸入模式,來檢測輸入的電平情況
配置旋鈕編碼器為3個引腳輸入模式,用來檢測是否旋轉與按下
配置LED引腳為推挽輸出模式,來驅動LED閃爍
配置串口與滴答定時器延時,串口主要用來除錯,延時用來消耗某些時刻需要消耗的時間
回圈:
回圈檢測旋鈕狀態,如果旋轉了就根據旋轉的方向與角度設定時間的大小,如果旋鈕按鍵按下,那么前進狀態變成1
main.c
//主函式
int main(void)
{
u8 state;
int ang,i;
uart_init(9600);//藍牙串口初始化
delay_init(); //延時初始化
SteerinMotor_Init(); //舵機初始化
EncodeMotor_Init();//編碼電機初始化
OLED_Init();//oled初始化
LED_Init();//led初始化
TIM1_Int_Init(100,7200);//定時器初始化10ms
Encodeing_Init();//旋鈕編碼器初始化
//測驗
printf(" this is Ramp patorl trolley by HUAZUOCHEN! ^_^ \r\n");
while (1) {
OLED_update();//更新OLED顯示
encodeing_scan();//編碼器掃描
//獲取紅外線傳感器傳回的資料
state = Get_Infrared_Sensor();
ang = 0;
switch (state)//循跡轉彎設定
{
case 0x00:ang = 0;
break;
case 0x01:ang = -55;
break;
case 0x03:ang = -45;
break;
case 0x02:ang = -10;
break;
case 0x06:set_steerMotor_ang(0);//設定舵機角度 0
break;
case 0x04:ang = 10;
break;
case 0x0c:ang = 45;
break;
case 0x08:ang = 55;
break;
case 0x0f: //識別到雜亂信號角度設定為0
case 0x09:
case 0x05:
case 0x0a:
case 0x0e:
case 0x0b:
run_flag = 0;//停止
break;
default:ang = 0;
break;
}
if(ang != 0)
{
set_steerMotor_ang(ang);//設定舵機角度
delay_ms(100);
}
state = 0;
}
}
定時器1中斷,10ms呼叫一次,呼叫時計數10次呼叫,也就是100ms進行一次速度測量,V = X/t ,速度等于位移處以時間,位移等一編碼個數乘以編碼單位長度,小車輪的直徑為6.4厘米,周長為20.12cm,得到一個脈沖計數,大約是0.258毫米,得出左輪速度V_left = pause_cnt_left2.58;右輪速度V_right = pause_cnt_right2.58;當按下旋轉編碼器的按鍵run_flag = 1;使得PID演算法開始運行,小車開始按照計算好的速度與當前測量到的速度做比較,進行倍訓PID調節,
timer.c
u16 time_cnt,run_cnt;
//100ms計算一次速度
void TIM1_UP_IRQHandler(void)
{
if (TIM_GetITStatus(TIM1, TIM_IT_Update) != RESET) //檢查指定的TIM中斷發生與否:TIM 中斷源
{
TIM_ClearITPendingBit(TIM1, TIM_IT_Update); //清除TIMx的中斷待處理位:TIM 中斷源
time_cnt ++;
if(time_cnt >= 10)
{
V_left = pause_cnt_left*2.58;
V_right = pause_cnt_right*2.58;
pause_cnt_left=0;
pause_cnt_right=0;
time_cnt =0;
LED = !LED;
}
if(run_flag)
{
speed = 1200/time; //總路程/時間
Set_Temp1 = Set_Temp = speed;
set_pid_speed();
run_cnt++;
if(run_cnt == time*200)
{
run_flag = 0;
run_cnt = 0;
}
}
else
{
PID_OUT = 0;
PID_OUT1= 0;
//run_cnt = 0;
car_go_forward(0,0);//停止
}
}
}
霍爾編碼器脈沖獲取采用中斷方式,中斷設定上升沿下降沿都觸發,
電機傳動軸與編碼器相連,編碼器感應論上有13個感應線條,從而使得編碼器齒輪轉動一圈,或編碼器能識別到13個脈沖
減速箱使得小車輪子轉動一圈,電機軸轉動30圈,使得編碼器齒輪也轉動30圈,得到,小車輪子轉動一圈,編碼器輸出13×30,等于390個脈沖,又因為一個脈沖有一個上升,沿有一個下降沿,單片機通過檢測上升沿和下降沿,可以得到有780個計數,
encode_motor.c
double V_left,V_right;//定時器計算
u16 pause_cnt_left,pause_cnt_right;//脈沖計數
//外部中斷2服務程式
void EXTI2_IRQHandler(void)
{
pause_cnt_left++;
EXTI_ClearITPendingBit(EXTI_Line2); //清除LINE2上的中斷標志位
}
//外部中斷3服務程式
void EXTI3_IRQHandler(void)
{
pause_cnt_right++;
EXTI_ClearITPendingBit(EXTI_Line3); //清除LINE3上的中斷標志位
}
速度平衡演算法,給定一個速度,聽過與編碼電機反饋的速度進行比對,然后輸出一個算出來的PWM值回傳給電機調速,達成倍訓速度調節
PID.c
void PID_calc(float V_1, float V_2) //PID演算法
{
/***********************左輪**************************/
float Rate;//誤差變化率
float Rate1;//誤差變化率
Current_Error = Set_Temp - V_1;//當前誤差
Sum_Error += Current_Error; //誤差積分
Prev_Error = Last_Error;//存盤誤差積分
Last_Error = Current_Error;//存盤誤差分析
Rate = Current_Error - Last_Error; //變化速率計算
if (Rate > 10) //不讓ta大于5也不讓ta小于5
Rate = 10;
if (Rate < -10)
Rate = -10;
P_OUT = P * Gain * Current_Error; //比列項
I_OUT = I * Gain * Sum_Error; //積分項
//積分限幅處理
if (I_OUT > PID_I_MAX) I_OUT = PID_I_MAX; //不能超過最大值不能低于最小值
if (I_OUT < PID_I_MIN) I_OUT = PID_I_MIN;
//微分輸出處理
D_OUT = D * Gain * Rate;
PID_OUT = P_OUT + I_OUT + D_OUT ;
if (PID_OUT >= V_DATA_MAX) PID_OUT = V_DATA_MAX;
if (PID_OUT <= V_DATA_MIN) PID_OUT = V_DATA_MIN;
/***********************右輪********************************/
Current_Error1 = Set_Temp1 - V_2;//當前誤差
Sum_Error1 += Current_Error1; //誤差積分
Prev_Error1 = Last_Error1;//存盤誤差積分
Last_Error1 = Current_Error1;//存盤誤差分析
Rate1 = Current_Error1 - Last_Error1; //變化速率計算
if (Rate1 > 10) //不讓ta大于5也不讓ta小于5
Rate1 = 10;
if (Rate1 < -10)
Rate1 = -10;
P_OUT1 = P * Gain1 * Current_Error1; //比列項
I_OUT1 = I * Gain1 * Sum_Error1; //積分項
//積分限幅處理
if (I_OUT1 > PID_I_MAX1) I_OUT1 = PID_I_MAX1; //不能超過最大值不能低于最小值
if (I_OUT1 < PID_I_MIN1) I_OUT1 = PID_I_MIN1;
//微分輸出處理
D_OUT1 = D * Gain * Rate1;
PID_OUT1 = P_OUT1 + I_OUT1 + D_OUT1 ;
if (PID_OUT1 >= V_DATA_MAX1) PID_OUT1 = V_DATA_MAX1;
if (PID_OUT1 <= V_DATA_MIN1) PID_OUT1 = V_DATA_MIN1;
/*******************************************************/
}
獲取紅外傳感器值
紅外對管用一個發射管與一個接收管組成,紅外發射管發射出去的紅外線遇到白色物體會反射回紅外接收管,使之導通,反之遇到黑色物體不反射,使之截止,接收到的紅外線越強,導通電流越大,輸出電壓越大,輸出的電壓經過邏輯電路轉換為數字信號傳回到單片機進行識別處理,單片機引出4個引腳對應接收電平狀態,4個引腳配置為輸入模式,回圈檢測電平的變化,電平為1則對應紅外對管識別到黑色,電平0對應紅外對管識別到白色
//獲取傳感器狀態
u8 Get_Infrared_Sensor(void)
{
u8 state=0;
if(PBin(4) == 1)
state |= 0x08; //IN4
if(PBin(5) == 1)
state |= 0x04; //IN3
if(PBin(6) == 1)
state |= 0x02; //IN2
if(PBin(7) == 1)
state |= 0x01; //IN1
return state;
}
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/273294.html
標籤:其他