文章目錄
- 前言
- 一、試題
- 二、需要用到的模塊
- 1.LED
- 2.按鍵
- 3.ADC
- 4.串口2
- 5.RTC實時時鐘
- 三、主函式邏輯設計
- 四、 總結
- ①電壓變化曲線的理解
- ②串口資料包格式判斷
- ③字串轉成浮點型資料
前言
本程式設計是基于嵌入式開發板CT117E,stm32f103RBT6,本試題來自藍橋杯官網,試題和整個工程源檔案都在這里:
鏈接:https://pan.baidu.com/s/1yrhxZYLRcgOMBDivfVuqNw
提取碼:1234
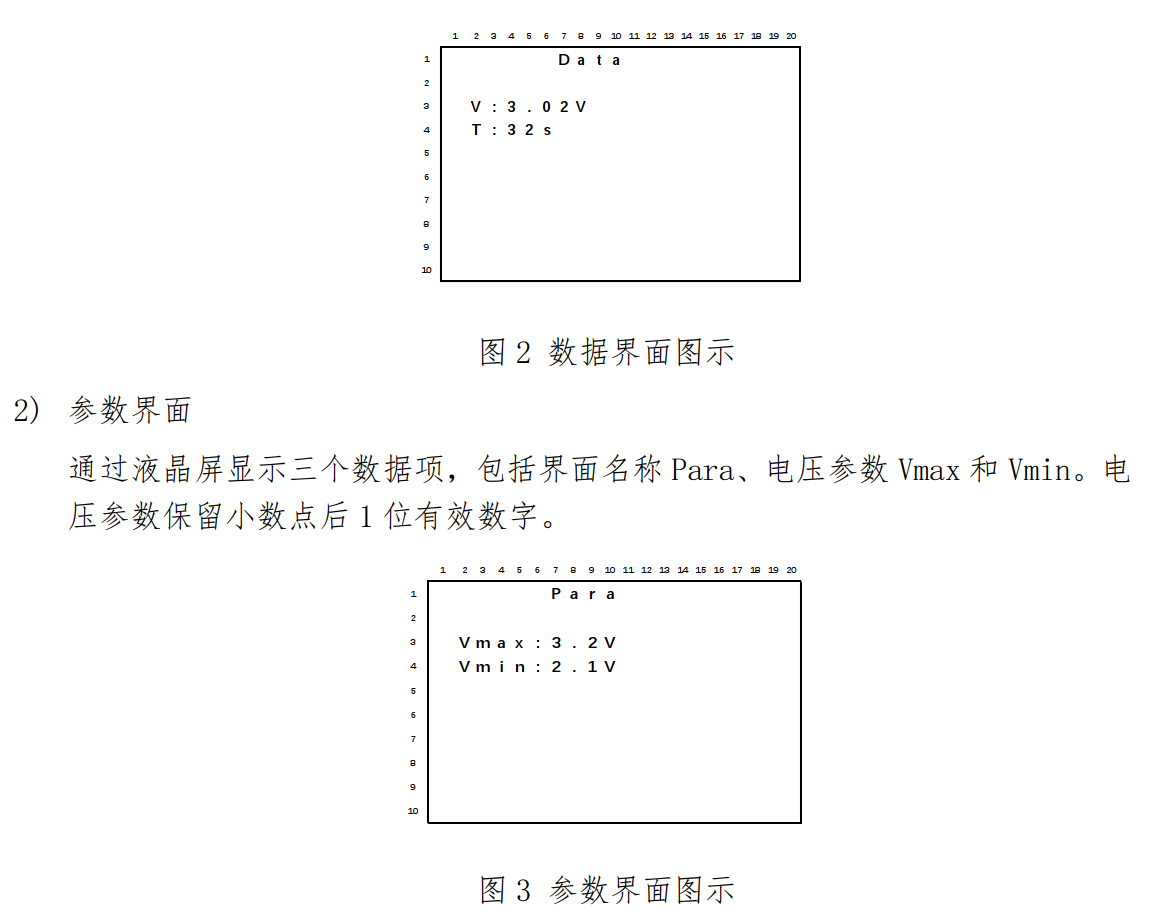
一、試題
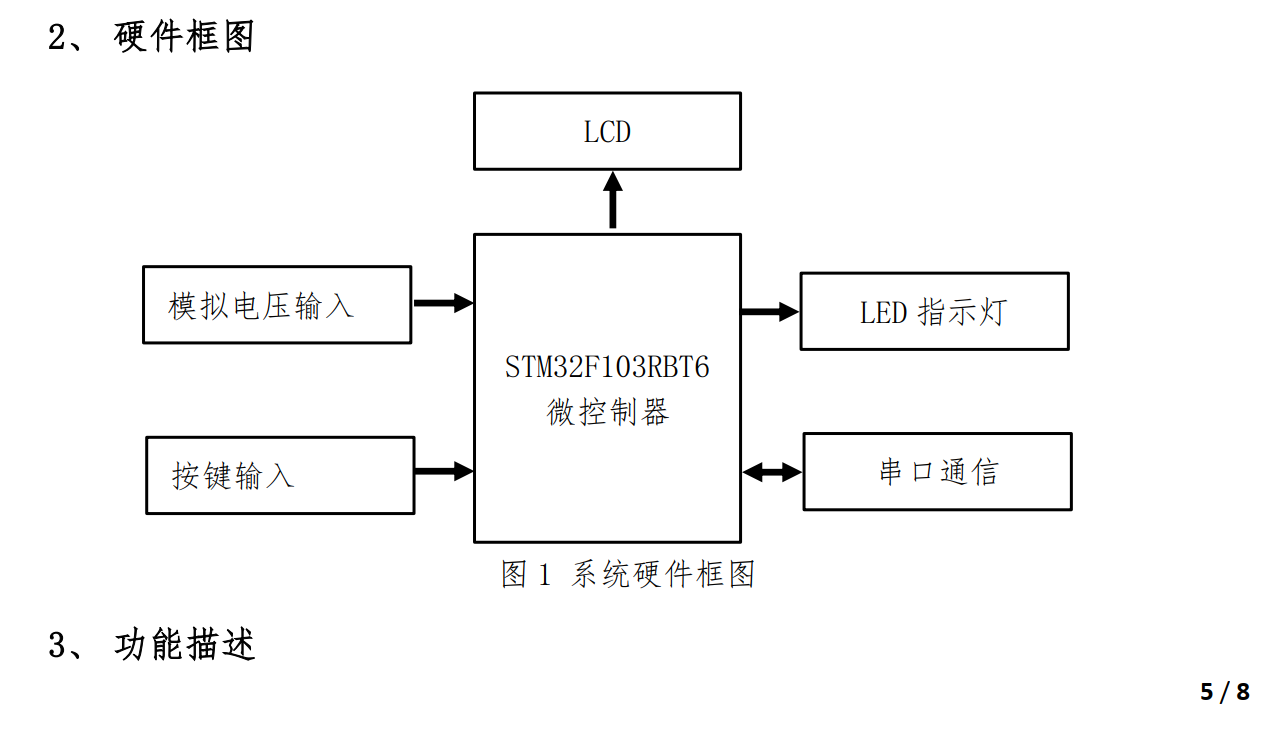
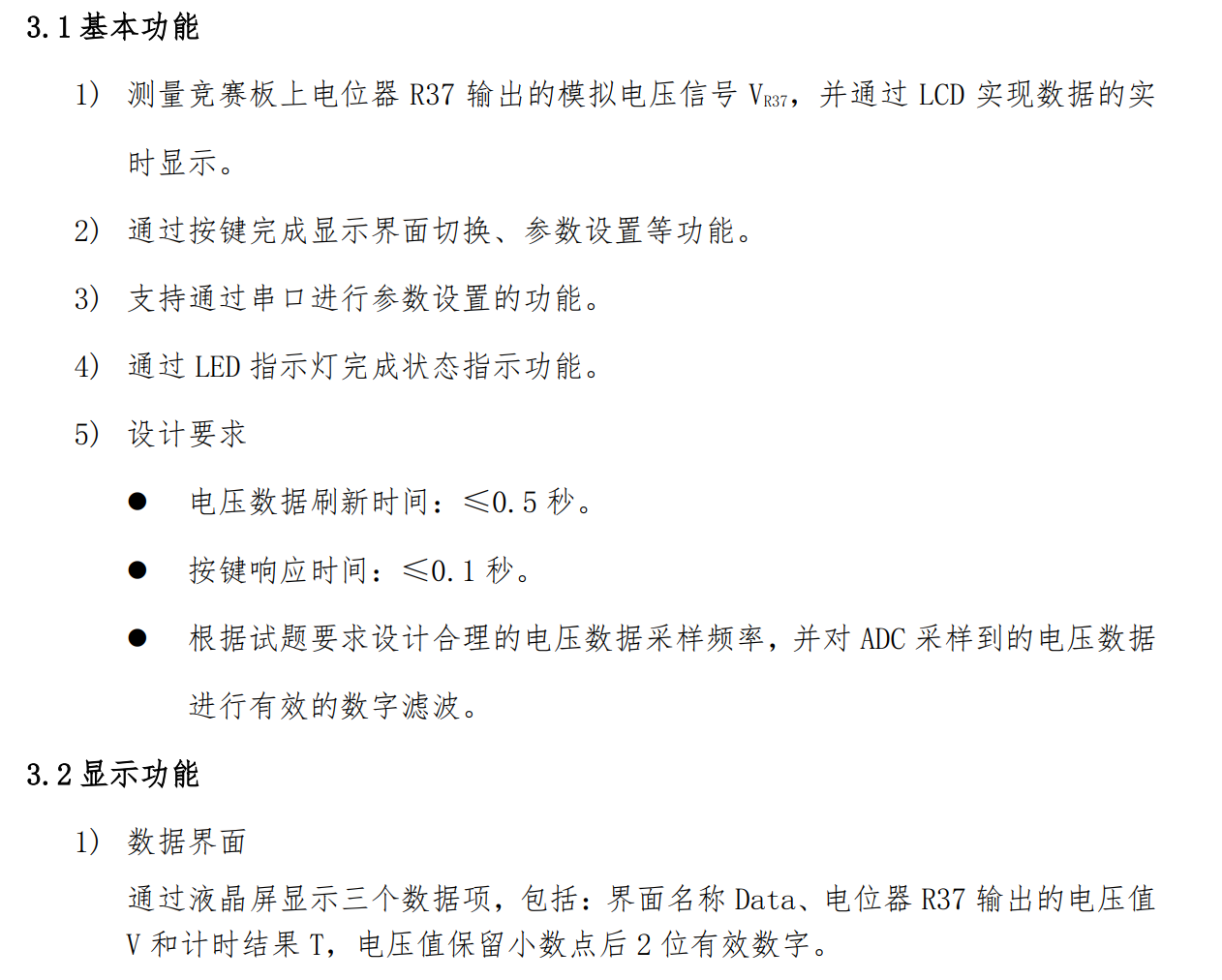
二、需要用到的模塊
1.LED
代碼如下:led.c:
#include "led.h"
void led_init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOD | RCC_APB2Periph_GPIOC, ENABLE);
/* Configure PD0 and PD2 in output pushpull mode */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOD, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = 0xff00;
GPIO_Init(GPIOC, &GPIO_InitStructure);
GPIOC->ODR |=0xff<<8;
GPIOD->ODR |=1<<2;
GPIOD->ODR &=~(1<<2);
}
void led_ctrl(u8 ledx,u8 status) //控制led的亮滅,ledx取值范圍:8-15
{
if(status)
{
GPIOC->ODR &=~(1<<ledx);
GPIOD->ODR |=1<<2;
GPIOD->ODR &=~(1<<2);
}
else
{
GPIOC->ODR |=1<<ledx;
GPIOD->ODR |=1<<2;
GPIOD->ODR &=~(1<<2);
}
}
led.h:
#ifndef LED_H
#define LED_H
#include "stm32f10x.h"
void led_init(void);
void led_ctrl(u8 ledx,u8 status);
#endif
2.按鍵
代碼如下:key.c:
#include "key.h"
void key_init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB, ENABLE);
/* Configure PD0 and PD2 in output pushpull mode */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_8;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1 | GPIO_Pin_2;
GPIO_Init(GPIOB, &GPIO_InitStructure);
}
key.h:
#include "key.h"
#ifndef KEY_H
#define KEY_H
#include "stm32f10x.h"
#define key1 GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_0) //讀取按鍵的狀態
#define key2 GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_8)
#define key3 GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_1)
#define key4 GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_8)
void key_init(void);
#endif
3.ADC
代碼如下:adc.c:
#include "adc.h"
void adc_init(void)
{
ADC_InitTypeDef ADC_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_ADCCLKConfig(RCC_PCLK2_Div6);
/* Enable ADC1, ADC2 and GPIOC clock */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1 | RCC_APB2Periph_GPIOB, ENABLE);
/* Configure PC.01, PC.02 and PC.04 (ADC Channel11, Channel12 and Channel14)
as analog input ----------------------------------------------------------*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_Init(GPIOB, &GPIO_InitStructure);
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent;
ADC_InitStructure.ADC_ScanConvMode = ENABLE;
ADC_InitStructure.ADC_ContinuousConvMode = ENABLE;
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None;
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;
ADC_InitStructure.ADC_NbrOfChannel = 1;
ADC_Init(ADC1, &ADC_InitStructure);
/* ADC2 regular channels configuration */
ADC_RegularChannelConfig(ADC1, ADC_Channel_8, 1, ADC_SampleTime_239Cycles5);
ADC_Cmd(ADC1, ENABLE);
/* Enable ADC1 reset calibration register */
ADC_ResetCalibration(ADC1);
/* Check the end of ADC1 reset calibration register */
while(ADC_GetResetCalibrationStatus(ADC1));
/* Start ADC1 calibration */
ADC_StartCalibration(ADC1);
/* Check the end of ADC1 calibration */
while(ADC_GetCalibrationStatus(ADC1));
}
u16 get_adc(void) //簡單的濾波,求平均值,獲取12位的adc值
{
int i;
u16 adc_buff[10];
ADC_SoftwareStartConvCmd(ADC1, ENABLE);
for(i=0;i<10;i++)
{
adc_buff[i]=ADC_GetConversionValue(ADC1);
}
for(i=1;i<10;i++)
{
adc_buff[0] += adc_buff[i];
}
ADC_SoftwareStartConvCmd(ADC1, DISABLE);
return adc_buff[0]/10;
}
adc.h:
#ifndef ADC_H
#define ADC_H
#include "stm32f10x.h"
void adc_init(void);
u16 get_adc(void);
#endif
4.串口2
代碼如下:usart2.c:
#include "usart.h"
u8 rx_flag=0;
void usart2_init(void)
{
USART_InitTypeDef USART_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2, ENABLE);
/* Enable the USARTy Interrupt */
NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx ;
/* Configure USARTy */
USART_Init(USART2, &USART_InitStructure);
USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);
/* Enable the USARTy */
USART_Cmd(USART2, ENABLE);
}
u8 usart_buff[7] ; //不能太大,只能剛剛好7個大小,命令字串的長度
u8 count=0;
u8 erro_flag=0;
void USART2_IRQHandler(void)
{
if(USART_GetITStatus(USART2, USART_IT_RXNE) != RESET)
{
/* Read one byte from the receive data register */
usart_buff[count]=USART_ReceiveData(USART2);
if(usart_buff[1]=='.' && usart_buff[3]==',' && usart_buff[5]=='.' && count==6 )
{
rx_flag=1;
USART_Cmd(USART2, DISABLE);
}
else
{
count++;
if(count>1 && usart_buff[1]!='.') //一發現接收的第二個不是'.',就清空陣列,并告訴主回圈錯了,在主回圈把在第二個后面發送的資料清空
{
u8 i;
for(i=0;i<7;i++)
{
usart_buff[i]=0;
}
erro_flag=1; //格式錯誤標志,在主回圈中需要用到
}
if(count>3 && usart_buff[3]!=',') //同上
{
u8 i;
for(i=0;i<7;i++)
{
usart_buff[i]=0;
}
erro_flag=1;
}
if(count>5 && usart_buff[5]!='.')
{
u8 i;
for(i=0;i<7;i++)
{
usart_buff[i]=0;
}
erro_flag=1;
}
if(count==7) //超陣列下標
{
u8 i;
count=0;
for(i=0;i<7;i++)
{
usart_buff[i]=0;
}
erro_flag=1;
}
}
}
}
usart2.h:
#ifndef USART_H
#define USART_H
#include "stm32f10x.h"
extern u8 rx_flag;
extern u8 usart_buff[7];
extern u8 count;
extern u8 erro_flag;
void usart2_init(void);
#endif
5.RTC實時時鐘
代碼如下:rtc.c:
#include "rtc.h"
u8 TimeDisplay=0;
void rtc_init(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
/* Configure one bit for preemption priority */
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
/* Enable the RTC Interrupt */
NVIC_InitStructure.NVIC_IRQChannel = RTC_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
/* Enable PWR and BKP clocks */
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR | RCC_APB1Periph_BKP, ENABLE);
/* Allow access to BKP Domain */
PWR_BackupAccessCmd(ENABLE);
/* Reset Backup Domain */
BKP_DeInit();
/* Enable the LSI OSC */
RCC_LSICmd(ENABLE);
/* Wait till LSI is ready */
while (RCC_GetFlagStatus(RCC_FLAG_LSIRDY) == RESET)
{}
/* Select the RTC Clock Source */
RCC_RTCCLKConfig(RCC_RTCCLKSource_LSI);
/* Enable RTC Clock */
RCC_RTCCLKCmd(ENABLE);
/* Wait for RTC registers synchronization */
RTC_WaitForSynchro();
/* Wait until last write operation on RTC registers has finished */
RTC_WaitForLastTask();
/* Enable the RTC Second */
RTC_ITConfig(RTC_IT_SEC, ENABLE);
/* Wait until last write operation on RTC registers has finished */
RTC_WaitForLastTask();
/* Set RTC prescaler: set RTC period to 1sec */
RTC_SetPrescaler(40000);
/* Wait until last write operation on RTC registers has finished */
RTC_WaitForLastTask();
}
void RTC_IRQHandler(void) //每1S進入中斷
{
if (RTC_GetITStatus(RTC_IT_SEC) != RESET)
{
/* Clear the RTC Second interrupt */
RTC_ClearITPendingBit(RTC_IT_SEC);
/* Enable time update */
TimeDisplay = 1; //主函式死回圈里的標志位,對定時值進行自加,達到計時的效果
/* Wait until last write operation on RTC registers has finished */
RTC_WaitForLastTask();
}
}
rtc.h:
#ifndef RTC_H
#define RTC_H
#include "stm32f10x.h"
extern u8 TimeDisplay;
void rtc_init(void);
#endif
三、主函式邏輯設計
思路流程圖:
stm32f10x_it.c:
#include "stm32f10x_it.h"
extern u32 TimingDelay;
extern u8 key_flag;
void SysTick_Handler(void)
{
static u8 key_num=0;
TimingDelay--;
key_num++;
if(key_num==50) //50ms定時標志,進行按鍵的掃描和adc值的獲取
{
key_flag=1;
key_num=0;
}
}
main.c:
#include "stm32f10x.h"
#include "lcd.h"
#include "stdio.h"
#include "led.h"
#include "key.h"
#include "adc.h"
#include "usart.h"
#include "rtc.h"
u32 TimingDelay = 0;
u32 time=0; //定時值
float string_int(char s); // 字串轉整形數,再以浮點型的數值回傳
float num1=1,num2=2,num3=3,num4=4; //用來提取決議串口傳輸過來的數值
u8 key_flag=0; //定時掃描標志,50ms掃描一次按鍵狀態
u8 key1_num=0; //按鍵1按下的計數標志,用于判斷長按短按,每50ms加一
u8 key2_num=0; //按鍵2按下的計數標志,用于判斷長按短按,每50ms加一
u8 key3_num=0; //按鍵3按下的計數標志,用于判斷長按短按,每50ms加一
u8 min_flag; //電壓低于最小值,用于判斷電壓的變化是從低于最低值上升到比最低值高,1:是,定時值清0
u8 max_flag; //電壓超最大值,停止計時
u8 buff[20]; //用于進行資料的拷貝顯示
u8 i; //for回圈需要的變數
u8 key1_flag=0; //按鍵1按下的標志,用于區分顯示的界面 1:引數界面 0:資料界面
float adc_val; //用于獲取adc的12位資料值,然后進行電壓數字轉換
float max=3.0,min=1.0; //最大,最小電壓 引數
float max_temp,min_temp; 用于存盤最大最小電壓修改前的值
void Delay_Ms(u32 nTime);
void key_read(void); //按鍵掃描
void lcd_show(void); //界面的顯示
int main(void)
{
SysTick_Config(SystemCoreClock/1000);
Delay_Ms(200);
STM3210B_LCD_Init();
LCD_Clear(Black);
LCD_SetBackColor(Black);
LCD_SetTextColor(White);
led_init();
key_init();
adc_init();
usart2_init();
rtc_init();
while(1)
{
if(key_flag) //0.05掃描,按鍵回應和電壓重繪0.05秒
{
key_read();
adc_val=get_adc(); //這里只獲取12位的adc值
key_flag=0;
}
if(rx_flag )
{
max_temp=max;
min_temp=min;
count=0;
num1=string_int(usart_buff[0]);
num2=string_int(usart_buff[2]);
num3=string_int(usart_buff[4]);
num4=string_int(usart_buff[6]); //獲取資料
max=num1+num2/10; // 轉換成浮點型資料
min=num3+num4/10;
if(max>3.3 || min>3.3 || max<min+1) //串口的資料不符合
{
max=max_temp;
min=min_temp; //把資料還原成修改前的資料
led_ctrl(10,1); //led3亮
}
else //資料正確了 燈滅
{
led_ctrl(10,0);
}
for(i=0;i<7;i++)
{
usart_buff[i]=0;
}
rx_flag=0;
USART_Cmd(USART2, ENABLE); //處理完資料后重新開啟串口
}
if(erro_flag ) //串口發送的資料有錯
{
led_ctrl(10,1); //資料的格式錯,led3亮
erro_flag=0;
for(i=0;i<7;i++) //再一次清空buff
{
usart_buff[i]=0;
}
count=0; //陣列下標回到0
}
if(TimeDisplay)
{
if(adc_val/0xfff*3.3<max && adc_val/0xfff*3.3>min && max_flag==0) //電壓的變化在最大和最小之間,且資料還沒超過最大, 定時數自加
{
time++;
led_ctrl(8,1); //led1亮
}
if(adc_val/0xfff*3.3 > max) //資料超過最大值,定時停止,
{
led_ctrl(8,0); //關燈
max_flag=1;
}
if(adc_val/0xfff*3.3 < min ) //定時值小于min,記錄起來min_flag=1;
{
if(max_flag==0) //如果這時資料的變化沒有超過max,定時器還是會計時的
{
time++;
led_ctrl(8,1);
}
min_flag=1;
}
if(adc_val/0xfff*3.3>min && min_flag==1) //資料從低于min變化到高于min,定時值清0
{
time=0;
min_flag=0;
max_flag=0;
}
TimeDisplay=0;
}
lcd_show(); //界面顯示
}
}
//
void Delay_Ms(u32 nTime)
{
TimingDelay = nTime;
while(TimingDelay != 0);
}
void key_read(void)
{
if(key1==0) //按鍵1
{
key1_num++;
if(key1_num>20) //長按
{
led_ctrl(8,0);
}
}
else
{
if(key1_num>1 && key1_num<10) //短按
{
key1_flag ^=1;
if(key1_flag) //key1_flag=1:切換到引數界面,保存切換前的資料
{
max_temp=max;
min_temp=min;
}
else
{
if(max<min+1) //判斷資料是否合法
{
led_ctrl(9,1); //不合法進行還原資料和點亮led2
max=max_temp;
min=min_temp;
}
else //合法就熄滅燈
{
led_ctrl(9,0);
}
}
}
key1_num=0;
}
if(key2==0 && key1_flag) //key2按下,且目前是在引數設定界面才有效
{
key2_num++;
if(key2_num>20)
{
}
}
else
{
if(key2_num>1 && key2_num<10) //短按
{
max=max+0.1; //資料加0.1
if(max>3.3)
{
max=0;
}
}
key2_num=0;
}
if(key3==0 && key1_flag) //key3按下,且目前是在引數設定界面才有效
{
key3_num++;
if(key3_num>20) //長按
{
//目前不需要
}
}
else
{
if(key3_num>1 && key3_num<10) //短按
{
min=min+0.1;
if(min>3.3)
{
min=0;
}
}
key3_num=0;
}
}
float string_int(char s)
{
float n;
switch(s)
{
case '0': n=0;
break;
case '1': n=1;
break;
case '2': n=2;
break;
case '3': n=3;
break;
case '4': n=4;
break;
case '5': n=5;
break;
case '6': n=6;
break;
case '7': n=7;
break;
case '8': n=8;
break;
case '9': n=9;
break;
default:break;
}
return n;
}
void lcd_show(void)
{
if(key1_flag==0)
{
LCD_DisplayStringLine(Line0," Data");
sprintf((char *)buff," V:%0.2fV ",adc_val/0xfff*3.3);
LCD_DisplayStringLine(Line2,buff);
sprintf((char *)buff," T:%ds ",time);
LCD_DisplayStringLine(Line3,buff);
}
else
{
LCD_DisplayStringLine(Line0," Para");
sprintf((char *)buff," Vmax:%0.1fV ",max);
LCD_DisplayStringLine(Line2,buff);
sprintf((char *)buff," Vmin:%0.1fV ",min);
LCD_DisplayStringLine(Line3,buff);
}
}
四、 總結
本試題的難點主要有:
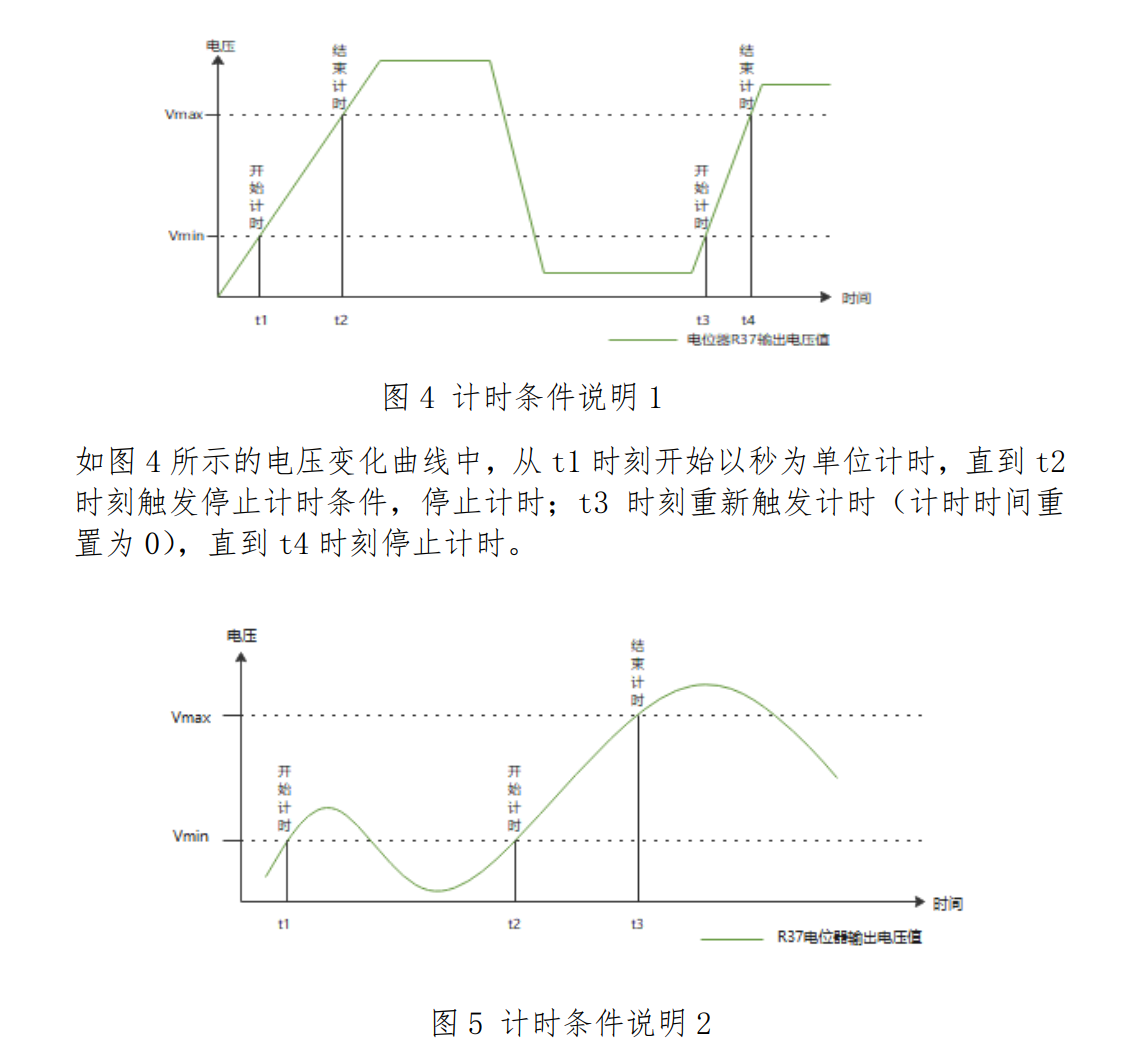
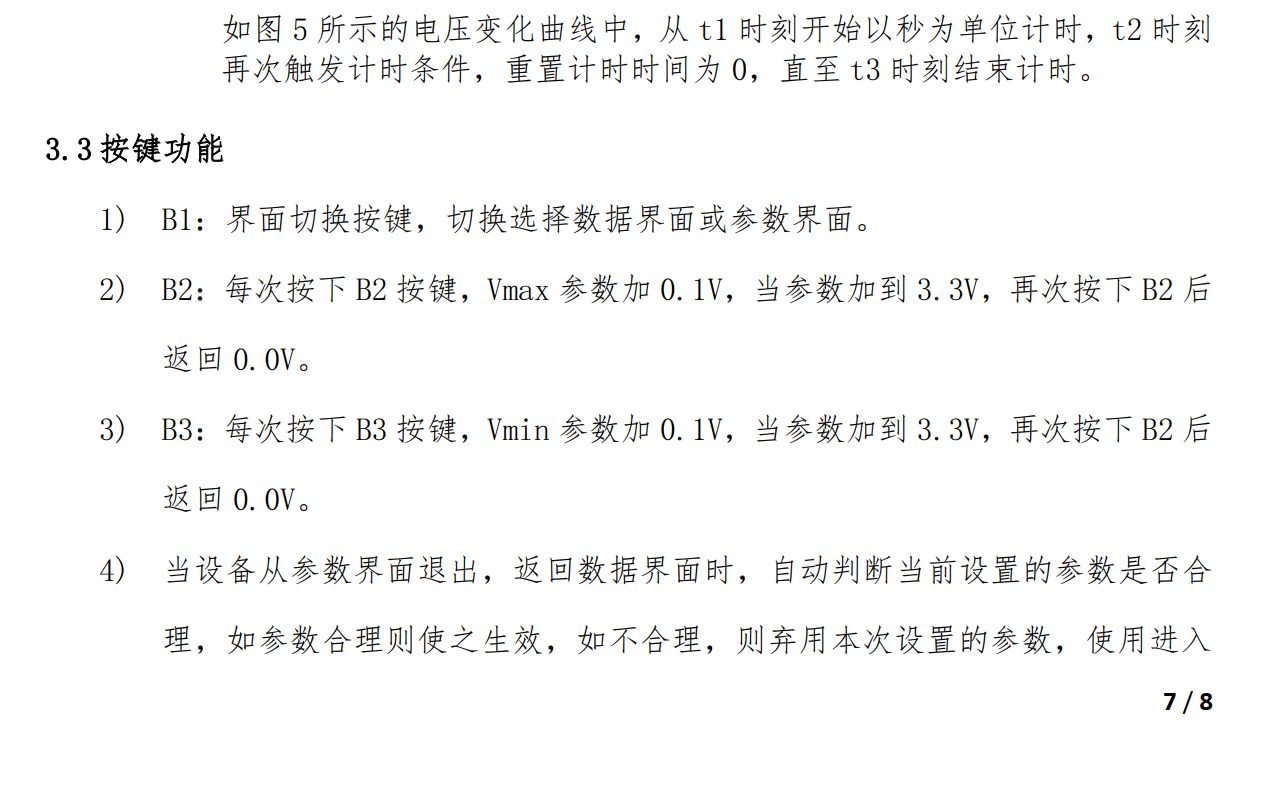
①電壓變化曲線的理解
- 在最大值和最小值之間會進行計時,
- 大于最大值停止計時但不清0,
- 電壓變化程序中在沒有大于最大值的情況下,都會進行計時,
- 在電壓從低于最低值上升到高于最低值,計時值要清0,
②串口資料包格式判斷
- 使用串口除錯助手發送資料,發送的位元組數程式無不知道,
- 串口中斷是接收1位元組一次中斷,用陣列存放資料,陣列大小為7,
- 判斷陣列[1]=’ . ’ ,陣列[3]=’ , ‘,陣列[5]=’ . ’ , 接收的資料達到7個也就是下標為6就到主回圈進行資料分析,判斷資料是否符合邏輯和滿足0-3.3之間,
- 資料一旦不滿足上面的條件就把陣列清空,
③字串轉成浮點型資料
- 串口接收到的資料是字符型的,以ASCII存盤,
- 用switch進行每個數字字符的判斷,轉換為float,
- 也可以用該數字字符減去’0’, 得到該數值,轉換成float , 如:’ 9 ’ - ’ 0 '=9,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/275069.html
標籤:其他
上一篇:2020計算機數電實驗二