如需轉載請注明出處:https://juyou.blog.csdn.net/article/details/116021595
我最近在找作業呀,哪位大佬有合適的作業機會,可以推薦一下呀,
坐標北京,嵌入式軟體工程師,
一、MCU對比
問題:
- 問題一:STM32F1和F4的區別?
解答:
參看:STM32開發 – STM32初識
內核不同:F1是Cortex-M3內核,F4是Cortex-M4內核;
主頻不同:F1主頻72MHz,F4主頻168MHz;
浮點運算:F1無浮點運算單位,F4有;
功能性能:F4外設比F1豐富且功能更強大,比如GPIO翻轉速率、上下拉電阻配置、ADC精度等;
記憶體大小:F1內部SRAM最大64K,F4有192K(112+64+16),
二、STM32 啟動程序
問題:
- 問題一:介紹以下STM32啟動程序?
解答:
參看:STM32開發 – 啟動流程
通過Boot引腳設定,尋找初始地址
初始化堆疊指標 __initial_sp
指向復位程式 Reset_Hander
設定例外中斷 HardFault_Handler
設定系統時鐘 SystemInit
呼叫C庫函式 _main
三、GPIO
問題:
- 問題一:介紹以下GPIO?
解答:
參看:STM32開發 – GPIO詳解
GPIO 8種作業模式(gpio_init.GPIO_Mode):
(1) GPIO_Mode_AIN 模擬輸入
(2) GPIO_Mode_IN_FLOATING 浮空輸入
(3) GPIO_Mode_IPD 下拉輸入
(4) GPIO_Mode_IPU 上拉輸入
(5) GPIO_Mode_Out_OD 開漏輸出
(6) GPIO_Mode_Out_PP 推挽輸出
(7) GPIO_Mode_AF_OD 復用開漏輸出
(8) GPIO_Mode_AF_PP 復用推挽輸出
APB2負責 AD,I/O,高級TIM,串口1,
APB1負責 DA,USB,SPI,I2C,CAN,串口2345,普通TIM,PWR
四、UART
問題:
- 問題一:串行通信方式介紹?
同步通信:I2C 半雙工,SPI 全雙工
異步通信:RS485 半雙工、RS232 全雙工 - 問題二:串口配置?
串口設定的一般步驟可以總結為如下幾個步驟:
(1)串口時鐘使能,GPIO時鐘使能
(2)串口復位
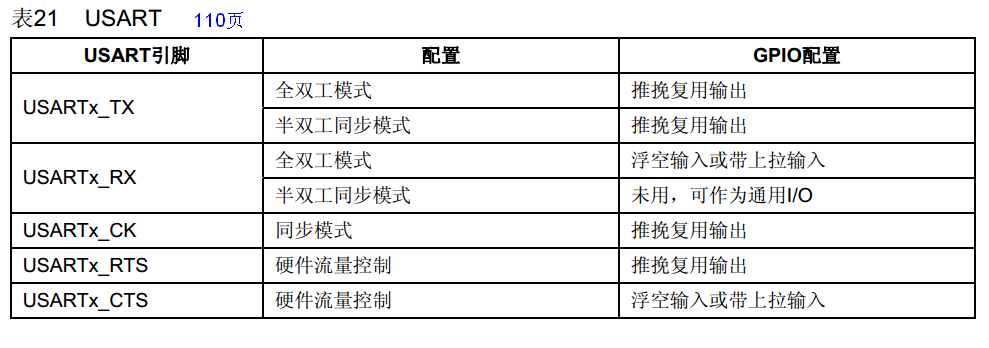
(3)GPIO埠模式設定
TX的GPIO作業模式為:GPIO_Mode_AF_PP;//復用推挽輸出
RX的GPIO作業模式為:GPIO_Mode_IN_FLOATING;//浮空輸入
(4)串口引數初始化
主要包含:波特率設定(115200)、8個資料位、1個停止位、無奇偶校驗位、無硬體資料流控制、收發模式,
(5)開啟中斷并且初始化NVIC(如果需要開啟中斷才需要這個步驟)
(6)使能串口
(7)撰寫中斷處理函式
解答:
參看:STM32開發 – 串口詳解
應用場景:GPS、藍牙、4G模塊
五、I2C
問題:
- 問題一:I2C 總線在傳送資料程序中共有三種型別信號?
(1)開始信號:SCL 為高電平時,SDA 由高電平向低電平跳變,開始傳送資料,
(2)結束信號:SCL 為高電平時,SDA 由低電平向高電平跳變,結束傳送資料,
(3)應答信號:接收資料的 IC 在接收到 8bit 資料后,向發送資料的 IC 發出特定的低電平脈沖,表示已收到資料,CPU 向受控單元發出一個信號后,等待受控單元發出一個應答信號,CPU 接收到應答信號后,根據實際情況作出是否繼續傳遞信號的判斷,若未收到應答信號,由判斷為受控單元出現故障, - 問題二:I2C配置主機模式埠該怎么配置?
硬體模式:復用開漏輸出、既不上拉也不下拉,(快速模式:400 Kbit/s)
軟體模擬:推挽輸出、配置上拉電阻,
解答:
參看:STM32開發 – PMIC、I2C詳解
硬體模式: 是有通信速率設定的
/* STM32 I2C 快速模式 */
#define I2C_Speed 400000
/* 通信速率 */
I2C_InitStructure.I2C_ClockSpeed = I2C_Speed;
軟體模擬: 沒有設定通信速率,該怎么計算呢?
通過I2C總線位延遲函式 i2c_Delay:
static void i2c_Delay(void)
{
uint8_t i;
/*
下面的時間是通過安富萊AX-Pro邏輯分析儀測驗得到的,
CPU主頻72MHz時,在內部Flash運行, MDK工程不優化
回圈次數為10時,SCL頻率 = 205KHz
回圈次數為7時,SCL頻率 = 347KHz, SCL高電平時間1.5us,SCL低電平時間2.87us
回圈次數為5時,SCL頻率 = 421KHz, SCL高電平時間1.25us,SCL低電平時間2.375us
IAR工程編譯效率高,不能設定為7
*/
for (i = 0; i < 10; i++);
}
應用場景:PMIC、加速度計、陀螺儀
六、SPI
問題:
- 問題一:SPI需要幾根線?
SPI 介面一般使用 4 條線通信:
MISO 主設備資料輸入,從設備資料輸出,
MOSI 主設備資料輸出,從設備資料輸入,
SCLK 時鐘信號,由主設備產生,
CS 從設備片選信號,由主設備控制, - 問題二:SPI通信的四種模式?
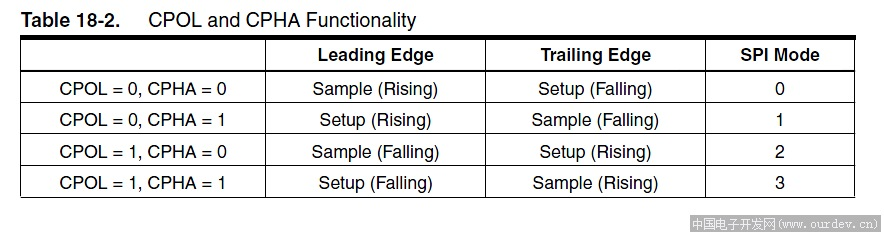
SPI 有四種作業模式,各個作業模式的不同在于 SCLK 不同, 具體作業由 CPOL,CPHA 決定,
(1)CPOL: (Clock Polarity),時鐘極性:
當CPOL為0時,時鐘空閑時電平為低;
當CPOL為1時,時鐘空閑時電平為高;
(2)CPHA:(Clock Phase),時鐘相位:
當CPHA為0時,時鐘周期的上升沿采集資料,時鐘周期的下降沿輸出資料;
當CPHA為1時,時鐘周期的下降沿采集資料,時鐘周期的上升沿輸出資料;
- 問題三:該如何確定使用哪種模式?
(1)先確認從機需求的 SCLK 極性,不作業時是在低電位還是高電位,由此確認 CPOL 為 0 或 1,
看原理圖,我們設定串行同步時鐘的空閑狀態為高電平所以我們選擇 SPI_CPOL_High,
也就是CPOL為1
(2)再由slave芯片 datasheet 中的時序圖確認 slave 芯片是在 SCLK 的下降沿采集資料,還是在SCLK的上升沿,
 翻譯一下:
翻譯一下:
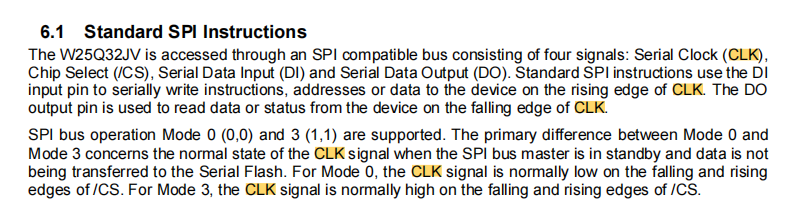
W25Q32JV通過SPI兼容總線訪問,包括四個信號:串行時鐘(CLK),芯片選擇(/CS),串行資料輸入(DI)和串行資料輸出(DO),標準SPI指令使用DI輸入引腳串行地將指令、地址或資料寫入CLK上升沿上的設備,DO輸出引腳用于從CLK下降沿上的設備讀取資料或狀態,支持模式0(0,0)和3(1,1)的SPI總線操作,模式0和
模式3關注的是當SPI總線主端處于待機狀態,資料沒有被傳輸到串行Flash時CLK信號的正常狀態,對于模式0,在下降和上升時,CLK信號通常是低的
邊緣/ CS,對于模式3,在/CS的下降和上升邊緣上CLK信號通常是高的,
既然串行同步時鐘的空閑狀態為高電平,這里我們選擇第二個跳變沿,所以選擇 SPI_CPHA_2Edge,
也就是CPHA為1
即,我們選擇的是模式3(1,1),
解答:
參看:STM32開發 – W25Q32JV SPI FlASH詳解
應用場景:SPI Flash
七、CAN
問題:
- 問題一:CAN總結介紹一下?
CAN控制器根據 CAN_L 和 CAN_H上 的電位差來判斷總線電平,總線電平分為顯性電平和隱性電平,二者比居其一,發送方通過使總線電平發生變化,將訊息發送給接收方, - 問題二:CAN初始化配置步驟?
(1)配置相關引腳的復用功能,使能CAN時鐘
(2)設定CAN作業模式及波特率等(CAN初始化環回模式,波特率500Kbps )
(3)設定濾波器 - 問題三:CAN發送資料格式?
CanTxMsg TxMessage;
TxMessage.StdId=0x12; // 標準識別符號
TxMessage.ExtId=0x12; // 設定擴展標示符
TxMessage.IDE=CAN_Id_Standard; // 標準幀
TxMessage.RTR=CAN_RTR_Data; // 資料幀
TxMessage.DLC=len; // 要發送的資料長度 發送8個位元組
for(i=0;i<len;i++)
TxMessage.Data[i]=msg[i]; //資料
解答:
參看:STM32開發 – CAN總線詳解
八、DMA
問題:
- 問題一:DMA介紹?
直接存盤器存取(DMA) 用來提供在外設和存盤器之間或者存盤器和存盤器之間的高速資料傳輸,無須CPU干預,資料可以通過DMA快速地移動,這就節省了CPU的資源來做其他操作, - 問題一:DMA傳輸模式有幾種?
DMA_Mode_Circular 回圈模式
DMA_Mode_Normal 正常快取模式
應用場景:GPS、藍牙,都是用的回圈采集,DMA_Mode_Circular模式,
解答:
參看:STM32開發 – DMA詳解
一個比較重要的函式,獲取當前剩余資料量大小,根據設定的接收buff大小減去當前剩余資料量 ,得到當前接收資料大小,
九、中斷
問題:
- 問題一:描述一下中斷的處理流程?
解答:
參看:STM32開發 – 外部中斷詳解
(1)初始化中斷,設定觸發方式是上升沿/下降沿/雙沿觸發,
(2)觸發中斷,進入中斷服務函式
十、時鐘系統
問題:
- 問題一:STM32有幾個時鐘源?
STM32 有5個時鐘源:HSI、HSE、LSI、LSE、PLL,
①、HSI是高速內部時鐘,RC振蕩器,頻率為8MHz,精度不高,
②、HSE是高速外部時鐘,可接石英/陶瓷諧振器,或者接外部時鐘源,頻率范圍為4MHz~16MHz,
③、LSI是低速內部時鐘,RC振蕩器,頻率為40kHz,提供低功耗時鐘,
④、LSE是低速外部時鐘,接頻率為32.768kHz的石英晶體,
⑤、PLL為鎖相環倍頻輸出,其時鐘輸入源可選擇為HSI/2、HSE或者HSE/2,倍頻可選擇為2~16倍,但是其輸出頻率最大不得超過72MHz,
解答:
參看:STM32開發 – 時鐘系統詳解
十一、UCOSII任務調度
問題:
- 問題一:RTOS的任務是怎么寫的?如何切出這個任務?
解答:
UCOS有一個任務調度機制,根據任務的優先級進行調度,
一個是硬體中斷, 那么系統會將當前任務有關變數入堆疊,然后執行中斷服務程式,執行完成后出堆疊回傳.
另一個是任務之間的切換,使用的方法就是任務調度,每一個任務有自己的堆疊,順度也是一樣的入堆疊,然后執行另一個程式,然后出線回傳,
并非是每一任務按優先級順序輪流執行的,而是高優先級的任務獨占運行,除非其主動放棄執行,否則低優先級任務不能搶占,同時高優先級可以把放出去給低優先級任務使用的CPU占用權搶回來,所以ucos的任務間要注意插入等待延時,以便ucos切出去讓低優先級任務執行,
十二、UCOSII中任務間的通信
問題:
- 問題一:UCOSII中任務間的通信方式有哪幾種?
解答:
在UCOSII中,是使用信號量、郵箱(訊息郵箱)和訊息佇列這些被稱作事件的中間環節來實作任務間的通信的,
信號量:
參看:ucosII 信號量使用總結(舉例講解)
信號量用于:
1.控制共享資源的使用權(滿足互斥條件)
2.標志某時間的發生
3.使2個任務的行為同步
應用實體:互斥信號量
作為互斥條件,信號量初始化為1,
實作目標:呼叫串口發送命令,必須等待回傳“OK”字符過后,才能發送下一條命令,每個任務都有可能使用到此發送函式,不能出現沖突!
郵箱(訊息郵箱):
訊息佇列:
概念:
(1)訊息佇列實際上就是郵箱陣列,
(2)任務和中斷都可以將一則訊息放入佇列中,任務可以從訊息佇列中獲取訊息,
(3)先進入佇列的訊息先傳給任務(FIFO),
(4)每個訊息佇列有一張等待訊息任務的等待串列,如果訊息列中沒有訊息,則等待訊息的任務就被掛起,直到訊息到來,
應用場景:
串口接收程式中的接識訓沖區,
儲存外部事件,
十三、通信協議
問題:
- 問題一:專案使用了自定義協議,是什么結構?
解答:
了解過Modbus協議,
結構為:幀頭(SDTC)+幀長度+指令+流水號+資料+CRC校驗,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/279668.html
標籤:其他
上一篇:基于STM32的(GSM+DHT11)果園環境監測系統
下一篇:軟體測驗--基礎概念