使用Python,OpenCV獲取、更改像素,修改影像通道,剪裁ROI
- 1. 效果圖
- 2. 原始碼
- 參考
這篇博客將介紹使用Python,OpenCV獲取、更改像素,修改影像通道,截取影像感興趣ROI;單通道圖,BGR三通道圖,四通道透明圖,不透明圖;
1. 效果圖
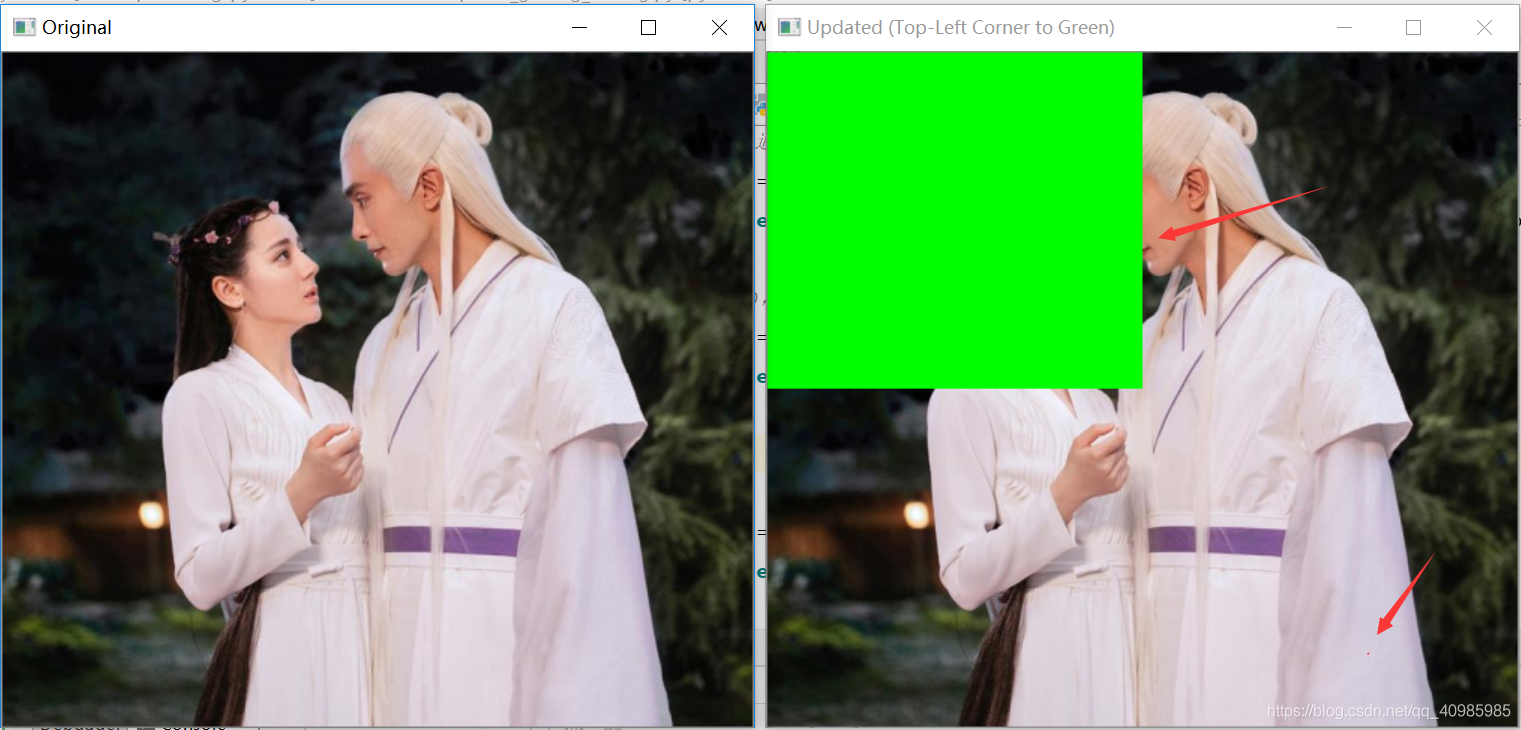
原圖 VS 更改右下某個像素為紅色,更改左上角1/4區域為綠色,效果圖如下:
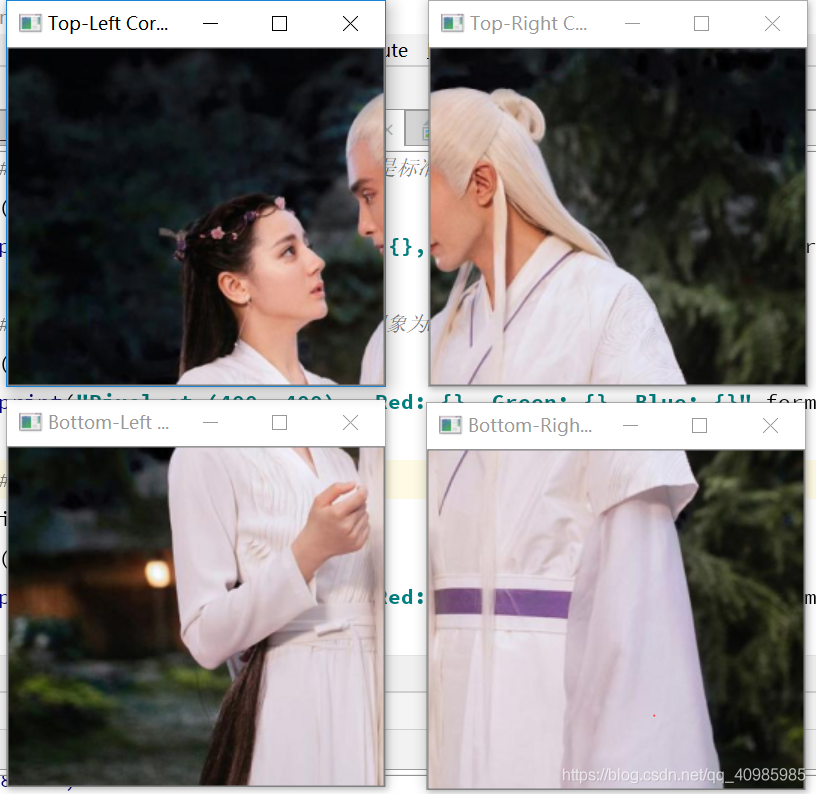
 裁剪感興趣區域:分別截取左上角、右上角、左下角、右下角,各占1/4;效果圖如下:
裁剪感興趣區域:分別截取左上角、右上角、左下角、右下角,各占1/4;效果圖如下:
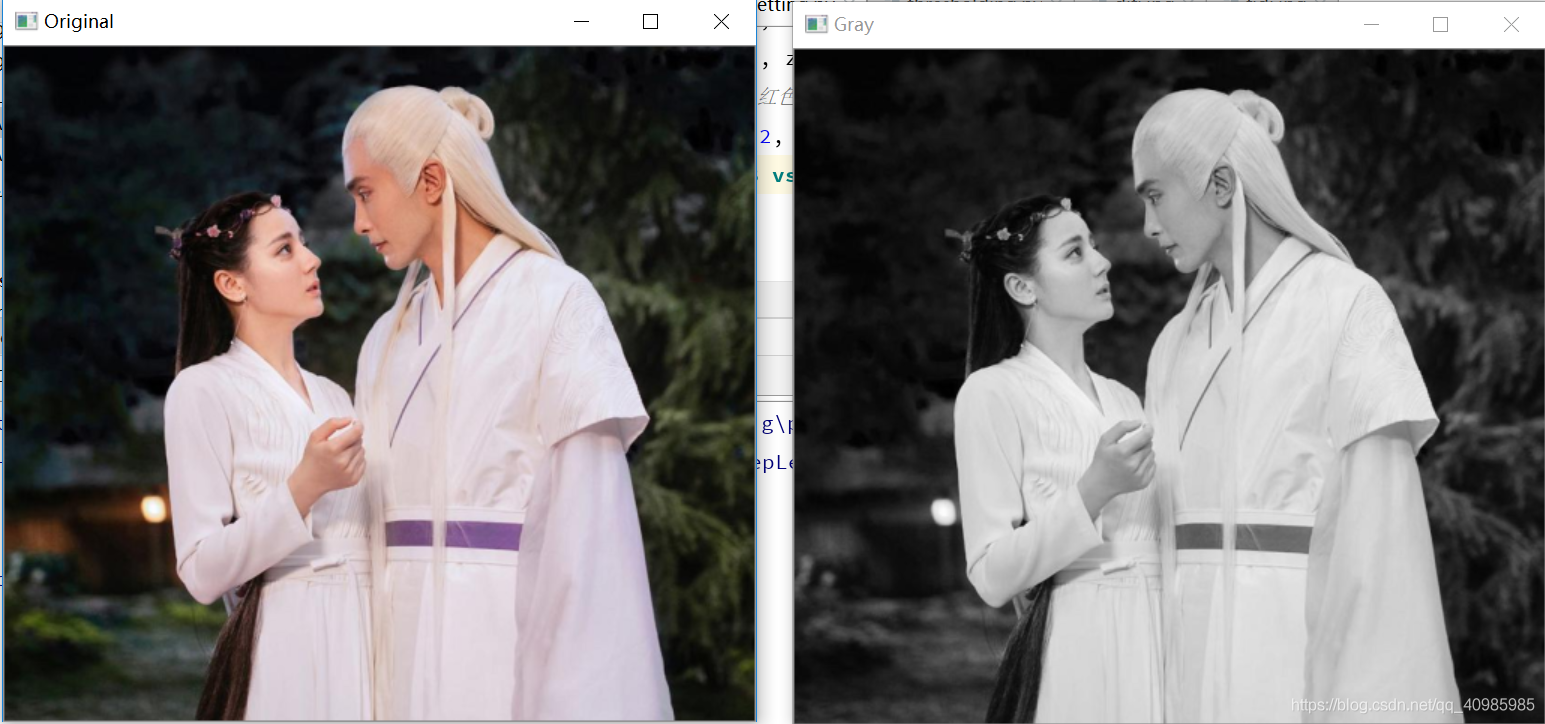
原圖 VS 影像單通道灰度圖效果如下:
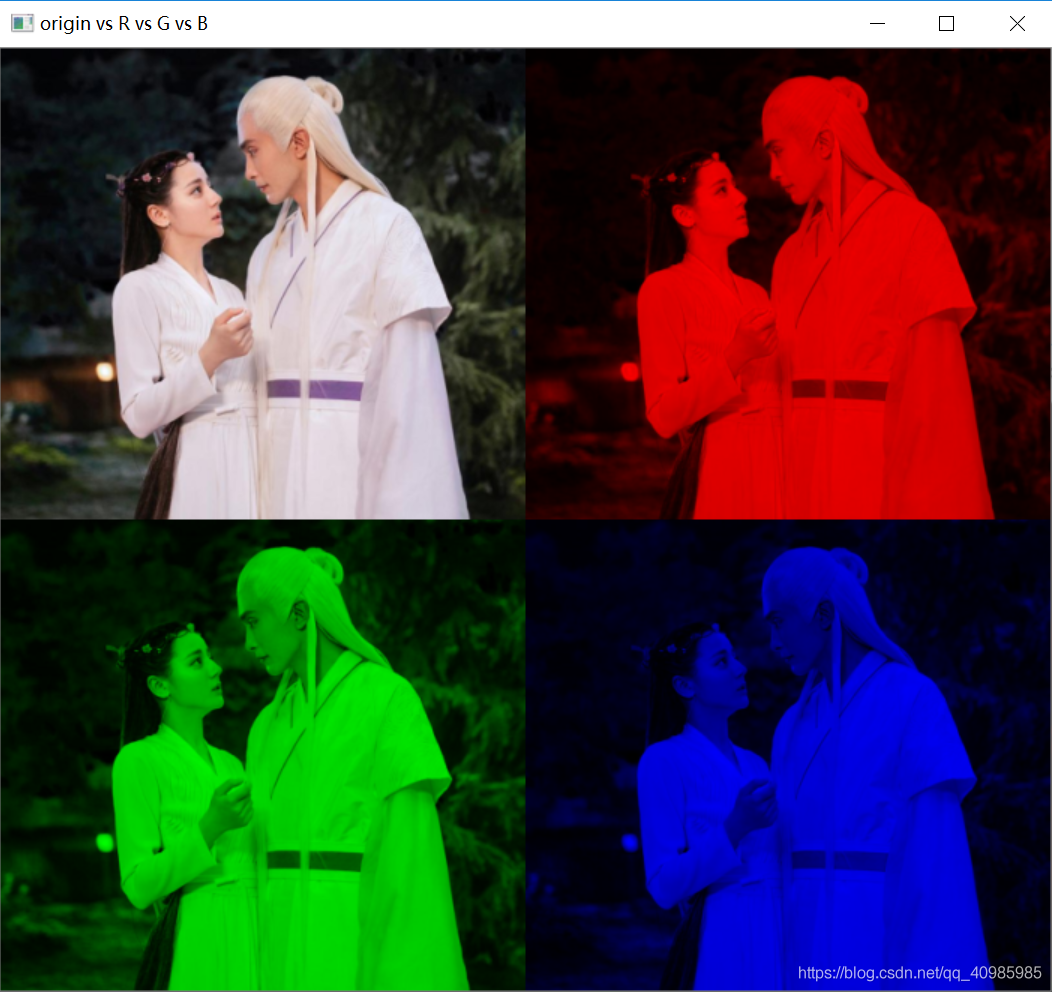
左上原圖 VS 右上R通道圖 VS 左下G通道圖 VS 右下B通道圖效果如下:
 影像4通道 全透明圖 VS 不透明效果圖:
影像4通道 全透明圖 VS 不透明效果圖:

2. 原始碼
# USAGE
# python opencv_getting_setting.py --image fjdj.png
# 匯入必要的包
import argparse
import cv2
import imutils
import numpy as np
# 構建命令列引數及決議
# --image 磁盤圖片路徑,默認名稱為當前py檔案同級目錄:fjdj.jpg
ap = argparse.ArgumentParser()
ap.add_argument("-i", "--image", type=str, default="fjdj.jpg",
help="path to the input image")
args = vars(ap.parse_args())
ap = argparse.ArgumentParser()
# 加載影像,獲取空間維度(寬度、高度),展示原始影像到螢屏
image = cv2.imread(args["image"])
image = imutils.resize(image, width=430)
origin = image.copy()
(h, w) = image.shape[:2]
cv2.imshow("Original", image)
# 影像以Numpy陣列存在,獲取左上角,影像索引從0開始
# 影像以BGR通道表示,因為最開始BGR是標準,后來調整為RGB
(b, g, r) = image[0, 0]
print("Pixel at (0, 0) - Red: {}, Green: {}, Blue: {}".format(r, g, b))
# 獲取x=380,y=380的像素值,影像想象為M*N的矩陣,M為行,N為列
(b, g, r) = image[380, 380]
print("Pixel at (380, 380) - Red: {}, Green: {}, Blue: {}".format(r, g, b))
# 更新x=50,y=20的像素為紅色
image[380, 380] = (0, 0, 255)
(b, g, r) = image[380, 380]
print("Pixel at (380, 380) - Red: {}, Green: {}, Blue: {}".format(r, g, b))
# 計算影像的中心
(cX, cY) = (w // 2, h // 2)
# 使用陣列切片獲取左上角1/4的部分
tl = image[0:cY, 0:cX]
cv2.imshow("Top-Left Corner", tl)
# 同樣的,用陣列切片裁剪 右上角、左下角、右下角部分,并展示
tr = image[0:cY, cX:w]
br = image[cY:h, cX:w]
bl = image[cY:h, 0:cX]
cv2.imshow("Top-Right Corner", tr)
cv2.imshow("Bottom-Right Corner", br)
cv2.imshow("Bottom-Left Corner", bl)
# 使用像素切片來更改像素區域的顏色
image[0:cY, 0:cX] = (0, 255, 0)
# 展示更新像素后的圖片
cv2.imshow("Updated (Top-Left Corner to Green)", image)
gray = cv2.cvtColor(origin, cv2.COLOR_BGR2GRAY)
cv2.imshow("Gray", gray)
(h, w) = origin.shape[:2]
zeros = np.zeros((h, w), dtype="uint8")
# 將origin分離為紅色,綠色和藍色通道, 然后我們使用Numpy 零陣列分別構造每個通道的表示形式
(B, G, R) = cv2.split(origin)
R = cv2.merge([zeros, zeros, R])
G = cv2.merge([zeros, G, zeros])
B = cv2.merge([B, zeros, zeros])
cv2.imshow("B G R", np.hstack([B, G, R]))
# 構建輸出幀 原圖在左上角 紅色通道右上角 綠色通道右下角 藍色通道左下角
output = np.zeros((h * 2, w * 2, 3), dtype="uint8")
output[0:h, 0:w] = origin
output[0:h, w:w * 2] = R
output[h:h * 2, 0:w] = G
output[h:h * 2, w:w * 2] = B
cv2.imshow("origin vs R vs G vs B", imutils.resize(output, width=700))
alpha0 = np.dstack([origin, np.ones((h, w), dtype="uint8") * 0])
cv2.imshow("alph 0", alpha0)
cv2.imwrite("alph 0.png", alpha0)
alpha1 = np.dstack([origin, np.ones((h, w), dtype="uint8") * 255])
cv2.imshow("alph 255", alpha1)
cv2.imwrite("alph 255.png", alpha1)
cv2.waitKey(0)
參考
- https://www.pyimagesearch.com/2021/01/20/opencv-getting-and-setting-pixels/
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/287831.html
標籤:其他
上一篇:硬核!OpenCV、機器學習、深度學習實戰教程分享(全程干貨)
下一篇:YOLO v2實作影像目標檢測