文章目錄
- 鏈接
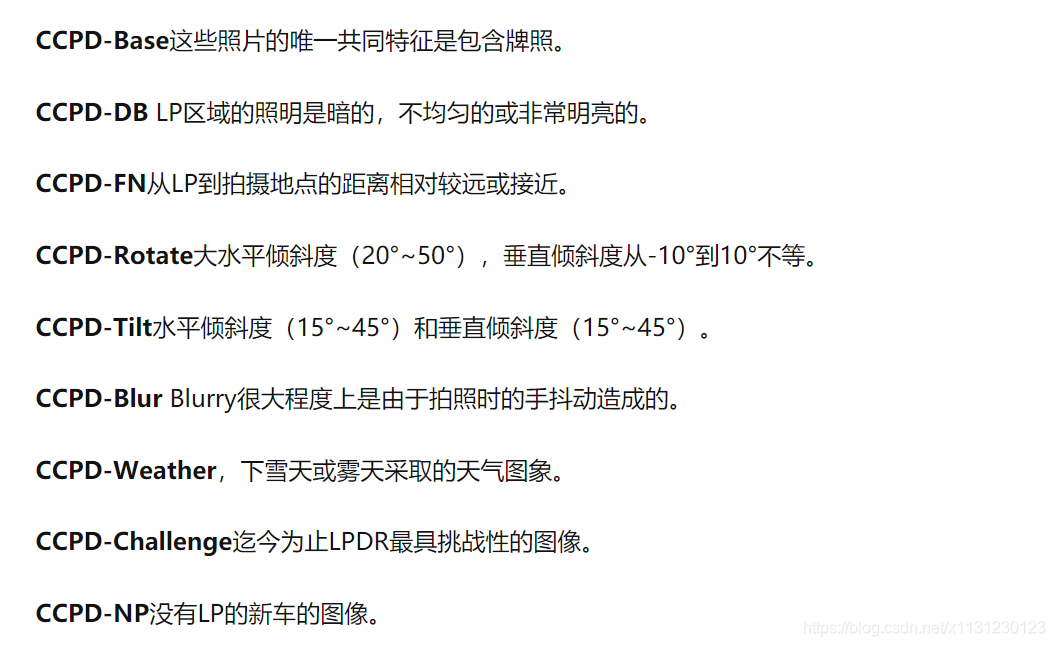
- CCPD資料集
- 圖片的標注
- 論文
- 使用
- 評價
- ref
鏈接
github:
https://github.com/xijunjun/CCPD
論文+模型
CCPD資料集
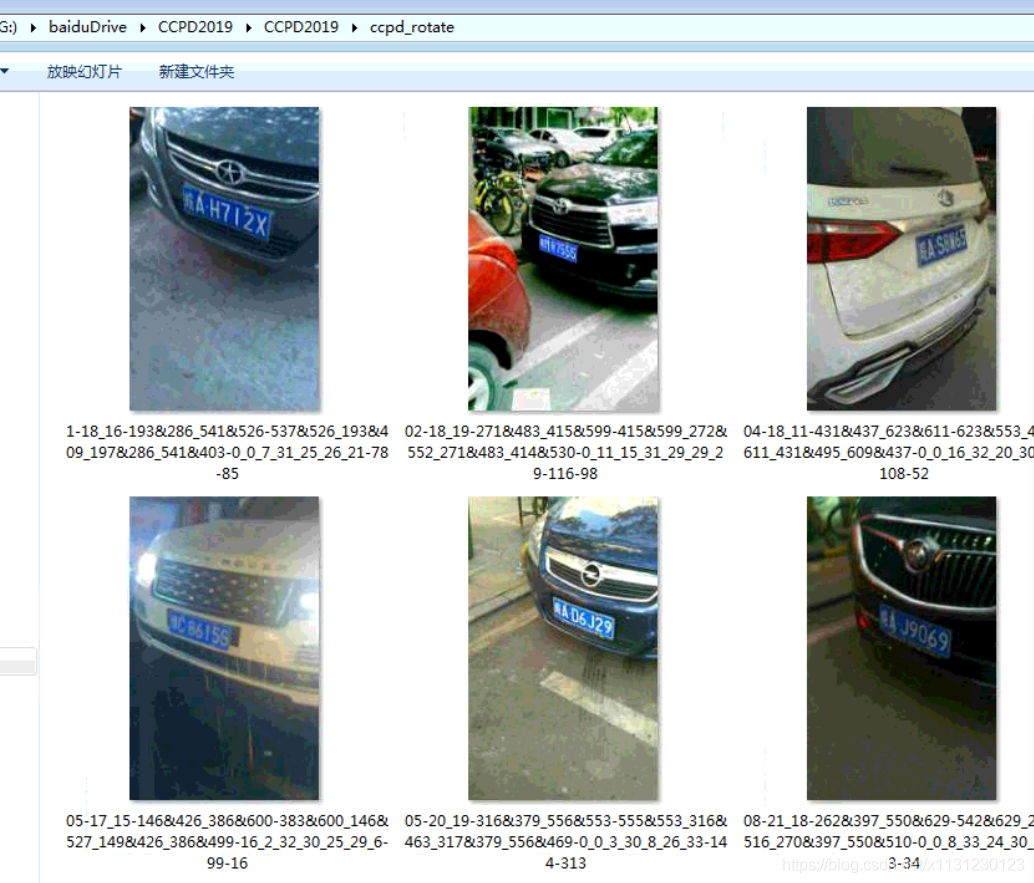
圖片的標注
比如一張圖片名字是
1-18_16-193&286_541&526-537&526_193&409_197&286_541&403-0_0_7_31_25_26_21-78-85.jpg
1 區域,
18_16 對應兩個角度, 水平18°, 豎直16°,
193&286_541&526 對應邊界框坐標:左上(193, 286), 右下(541, 526),
386&473_177&454_154&383_363&402對應四個角點坐標,可用于影像分割,
0_0_7_31_25_26_21 是車牌映射表,第一個數字是漢字,
78 是亮度
85 是模糊度
{
"皖": 0,
"滬": 1,
"津": 2,
"渝": 3,
"冀": 4,
"晉": 5,
"蒙": 6,
"遼": 7,
"吉": 8,
"黑": 9,
"蘇": 10,
"浙": 11,
"京": 12,
"閩": 13,
"贛": 14,
"魯": 15,
"豫": 16,
"鄂": 17,
"湘": 18,
"粵": 19,
"桂": 20,
"瓊": 21,
"川": 22,
"貴": 23,
"云": 24,
"西": 25,
"陜": 26,
"甘": 27,
"青": 28,
"寧": 29,
"新": 30
}
{
"a" : 0,
"b" : 1,
"c" : 2,
"d" : 3,
"e" : 4,
"f" : 5,
"g" : 6,
"h" : 7,
"j" : 8,
"k" : 9,
"l" : 10,
"m" : 11,
"n" : 12,
"p" : 13,
"q" : 14,
"r" : 15,
"s" : 16,
"t" : 17,
"u" : 18,
"v" : 19,
"w" : 20,
"x": 21,
"y" : 22,
"z" : 23,
"0" : 24,
"1" : 25,
"2" : 26,
"3" : 27,
"4" : 28,
"5" : 29,
"6" : 30,
"7" : 31,
"8" : 32,
"9" : 33

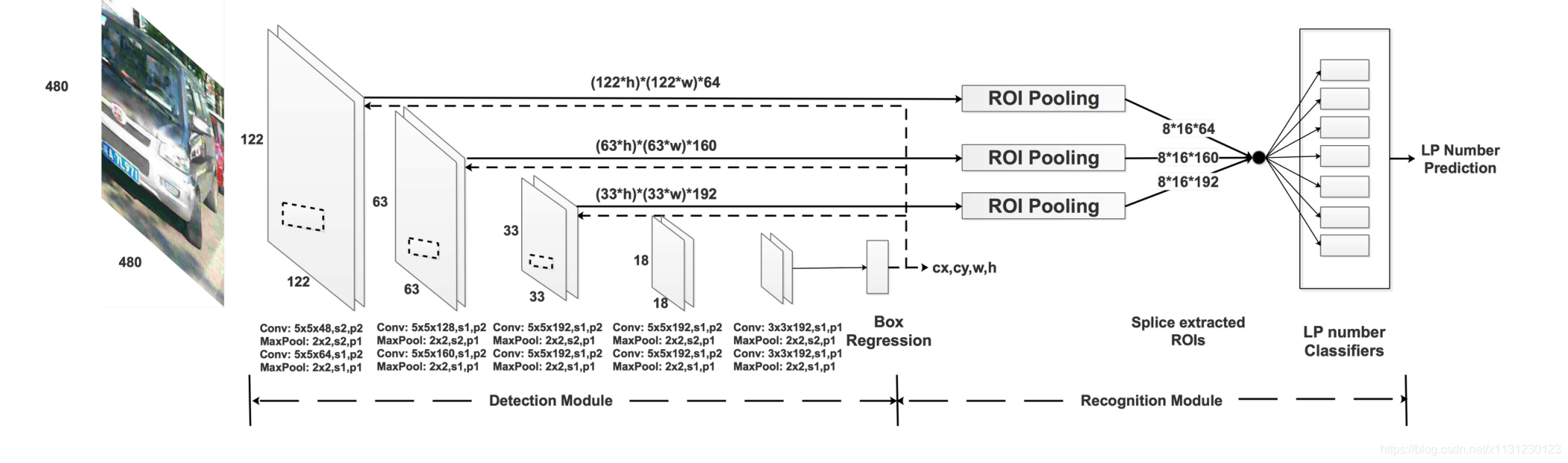
論文
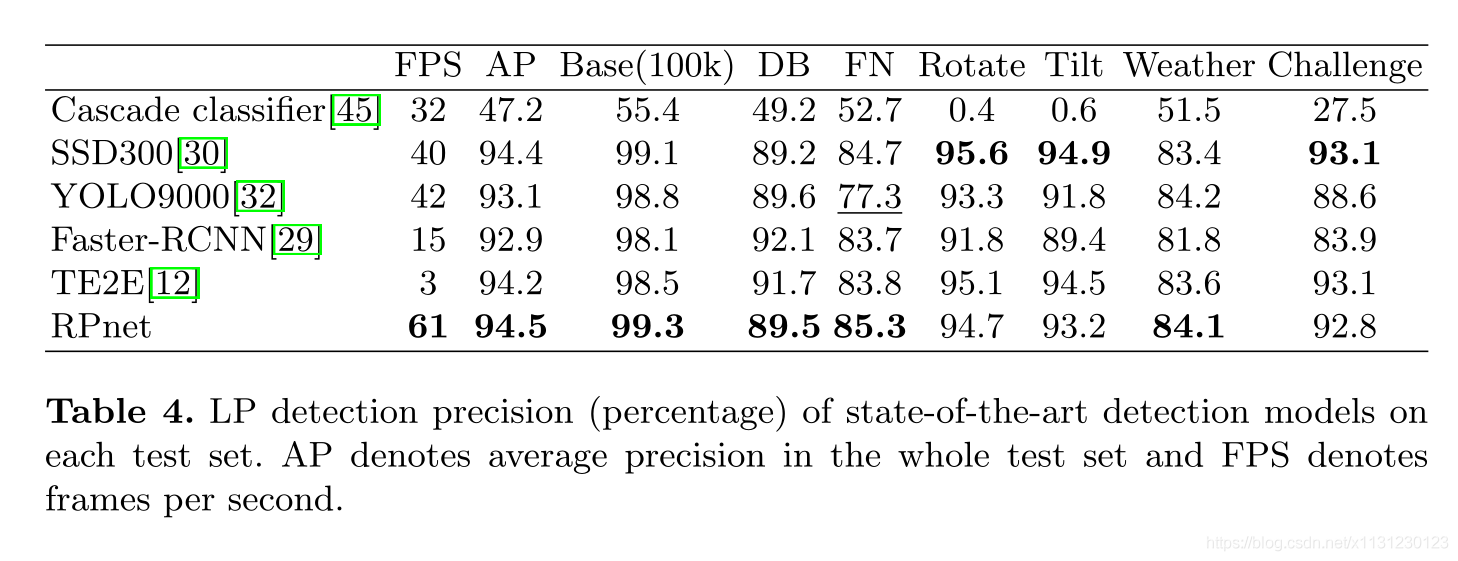
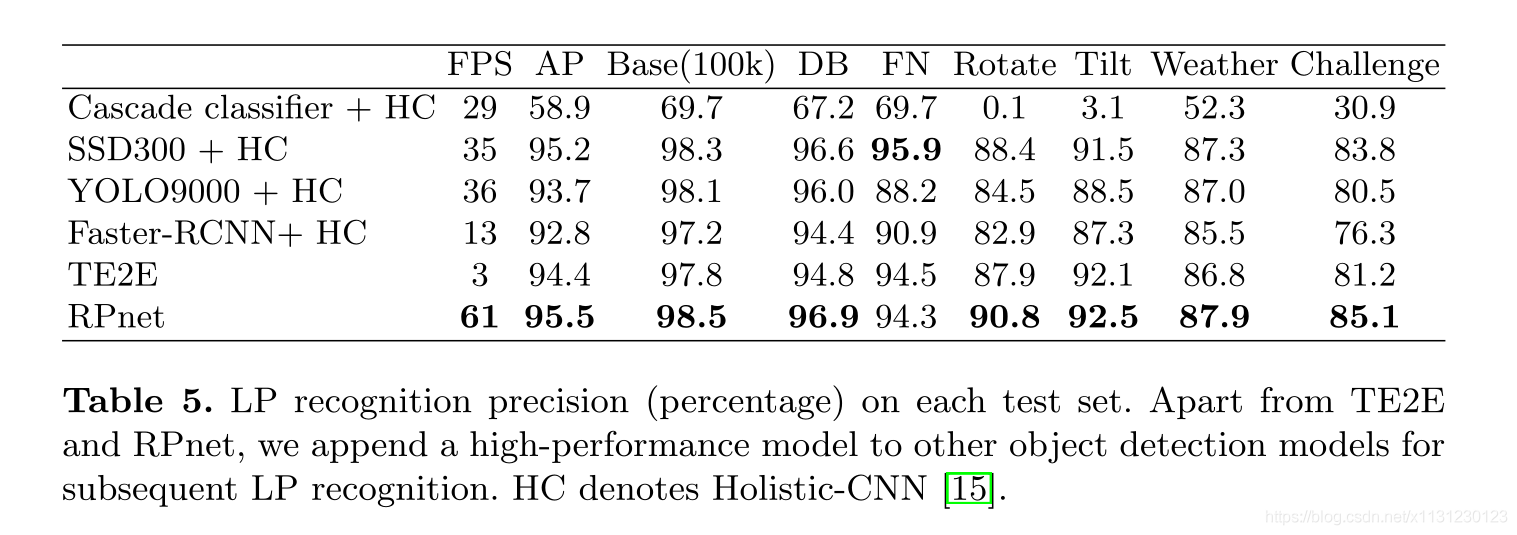
摘要,大多數當前的車牌檢測和識別方法都是在一個小的且通常不具有代表性的資料集上進行評估的,因為沒有可公開獲得的大的多樣化資料集,在本文中,我們介紹了CCPD,一個大而全面的線性規劃資料集,所有圖片均由路邊停車管理公司的作業人員手工拍攝,并仔細標注,據我們所知,CCPD是迄今為止最大的公開可用的LP資料集,擁有超過250,000張獨特的汽車影像,并且是唯一一個提供頂點位置注釋的資料集,利用CCPD,我們提出了一種新的網路模型,該模型能夠快速準確地預測包圍盒并同時識別相應的線性規劃數,通過對比實驗,我們證明了我們的模型在準確性和速度上都優于當前的目標檢測和識別方法,在現實世界的應用中,我們的模型以超過61 fps的速度和98.5%的準確率直接從相對高解析度的影像中識別LP數字,
Roadside Parking net (RPnet)
RPnet可以在較弱的NVIDIA Quadro P4000上以60 fps以上的速度運行,
損失函式


使用
評價
只針對停車場的單一場景、本地車牌多、車牌顏色單一,復雜場景可能效果略差,
ref
https://blog.csdn.net/qianbin3200896/article/details/103009221
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/289429.html
標籤:AI
上一篇:問題解決:配置靜態IP